Search Results (Searched for: )
- Tinker
- Tinker
19 Nov 2025 13:18
qtvcpqtdragon_hd failing to launch was created by Tinker
qtvcpqtdragon_hd failing to launch
Category: Qtvcp
- Muftijaja
- Muftijaja
19 Nov 2025 13:07
Replied by Muftijaja on topic problems with Y-Axis, elliptic deviations after several changes -Probe Basic V.5
problems with Y-Axis, elliptic deviations after several changes -Probe Basic V.5
Category: QtPyVCP
- JT

19 Nov 2025 12:07
- unknown
- unknown
19 Nov 2025 12:06
Replied by unknown on topic realtime log position to txt use python script
realtime log position to txt use python script
Category: General LinuxCNC Questions

- MaHa
- MaHa
19 Nov 2025 10:32
- andypugh

19 Nov 2025 10:29
Replied by andypugh on topic ISEL CNC/IMC4 programming language
ISEL CNC/IMC4 programming language
Category: General LinuxCNC Questions
- Fixenty
- Fixenty
19 Nov 2025 10:22
Touch resizing of gcode preview was created by Fixenty
Touch resizing of gcode preview
Category: Gmoccapy
- unknown
- unknown
19 Nov 2025 06:26
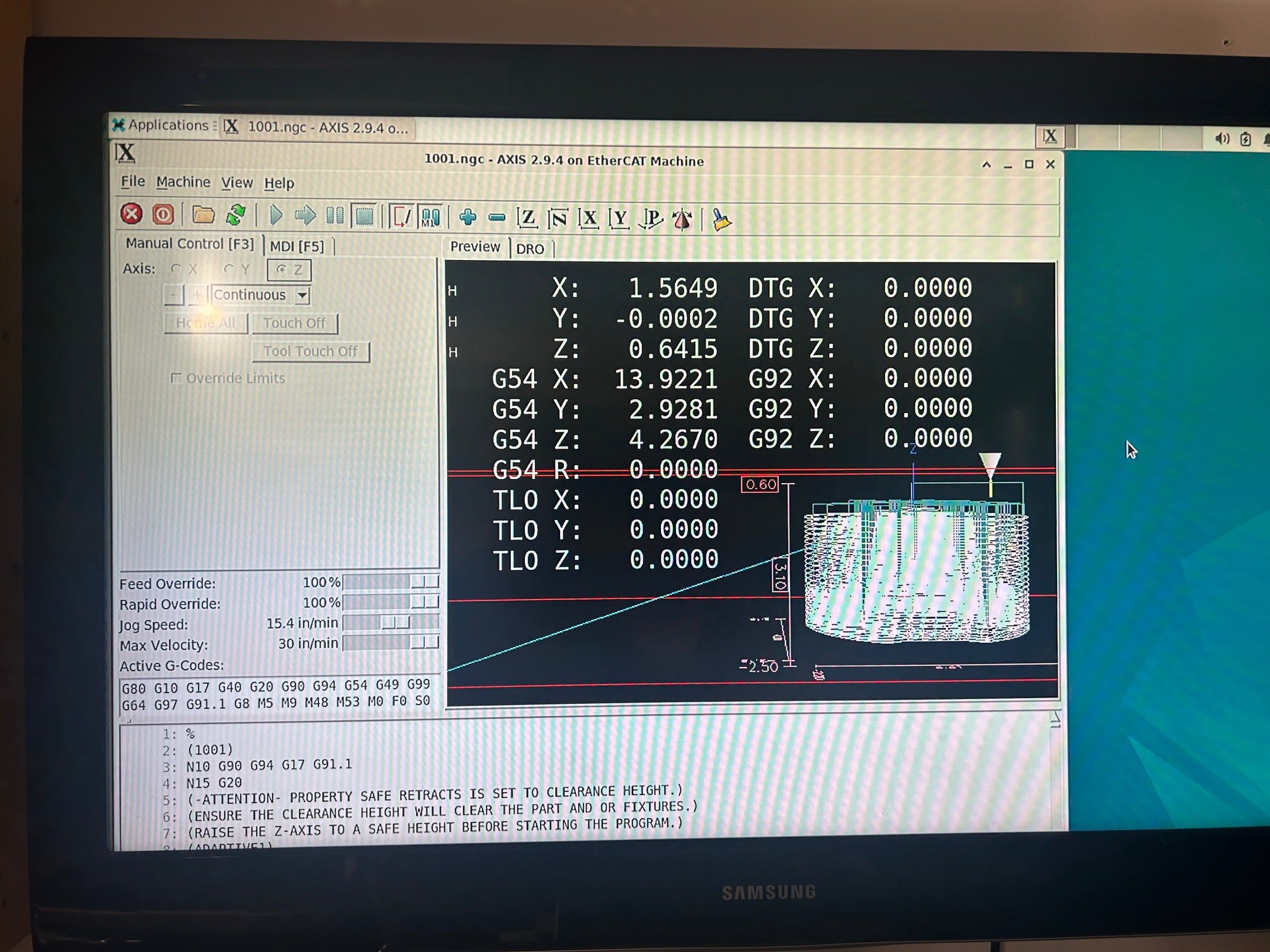
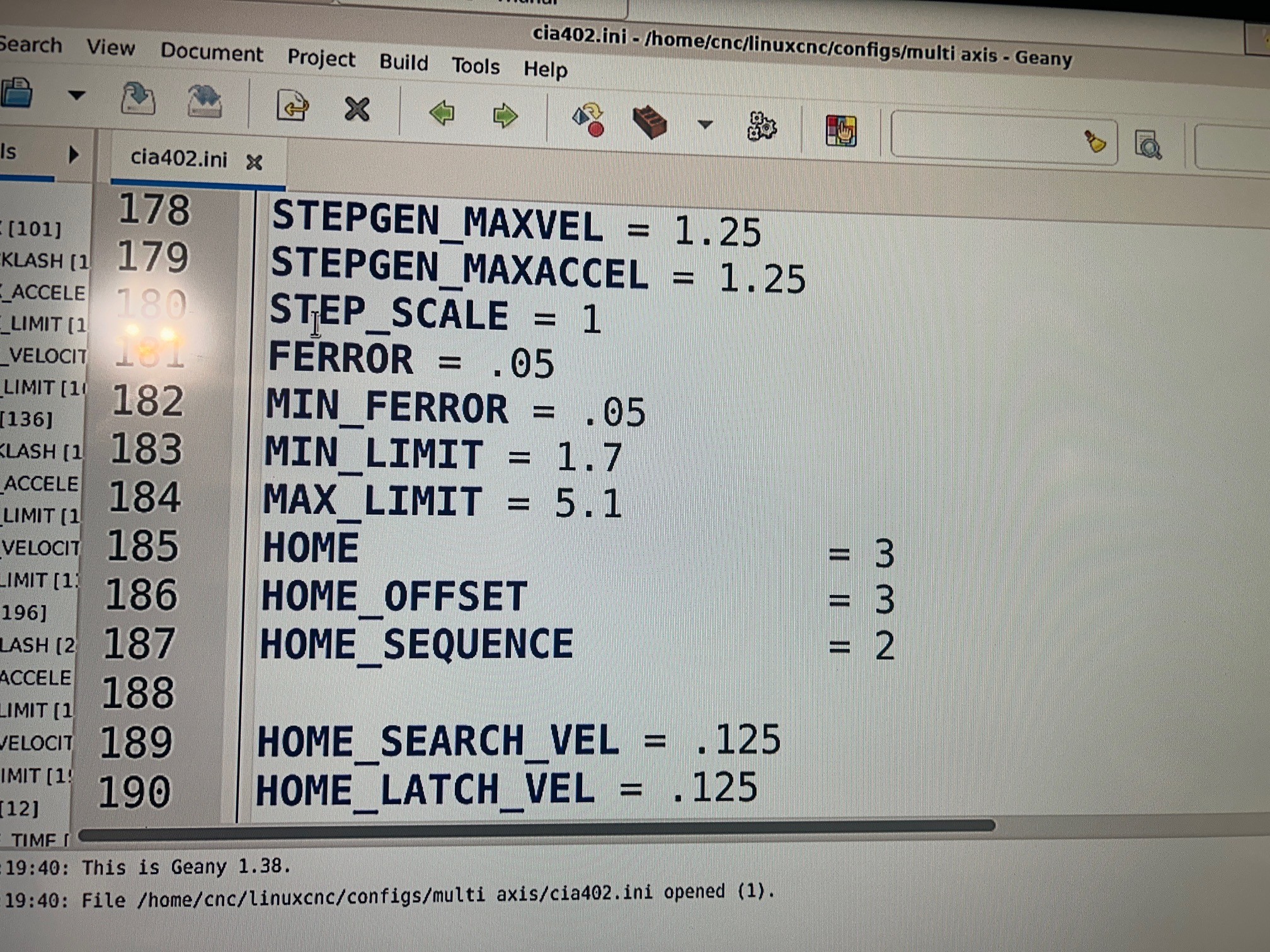
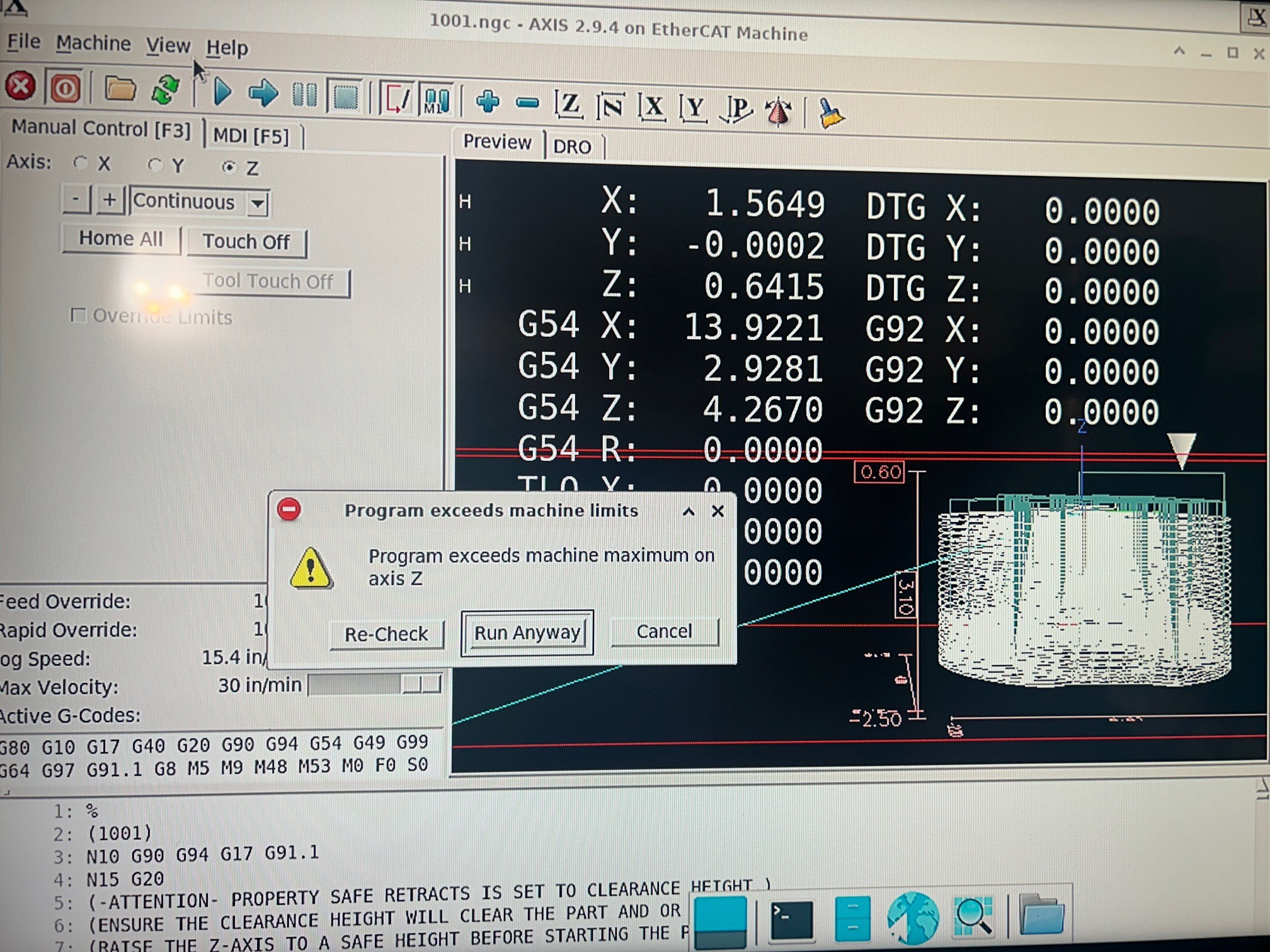
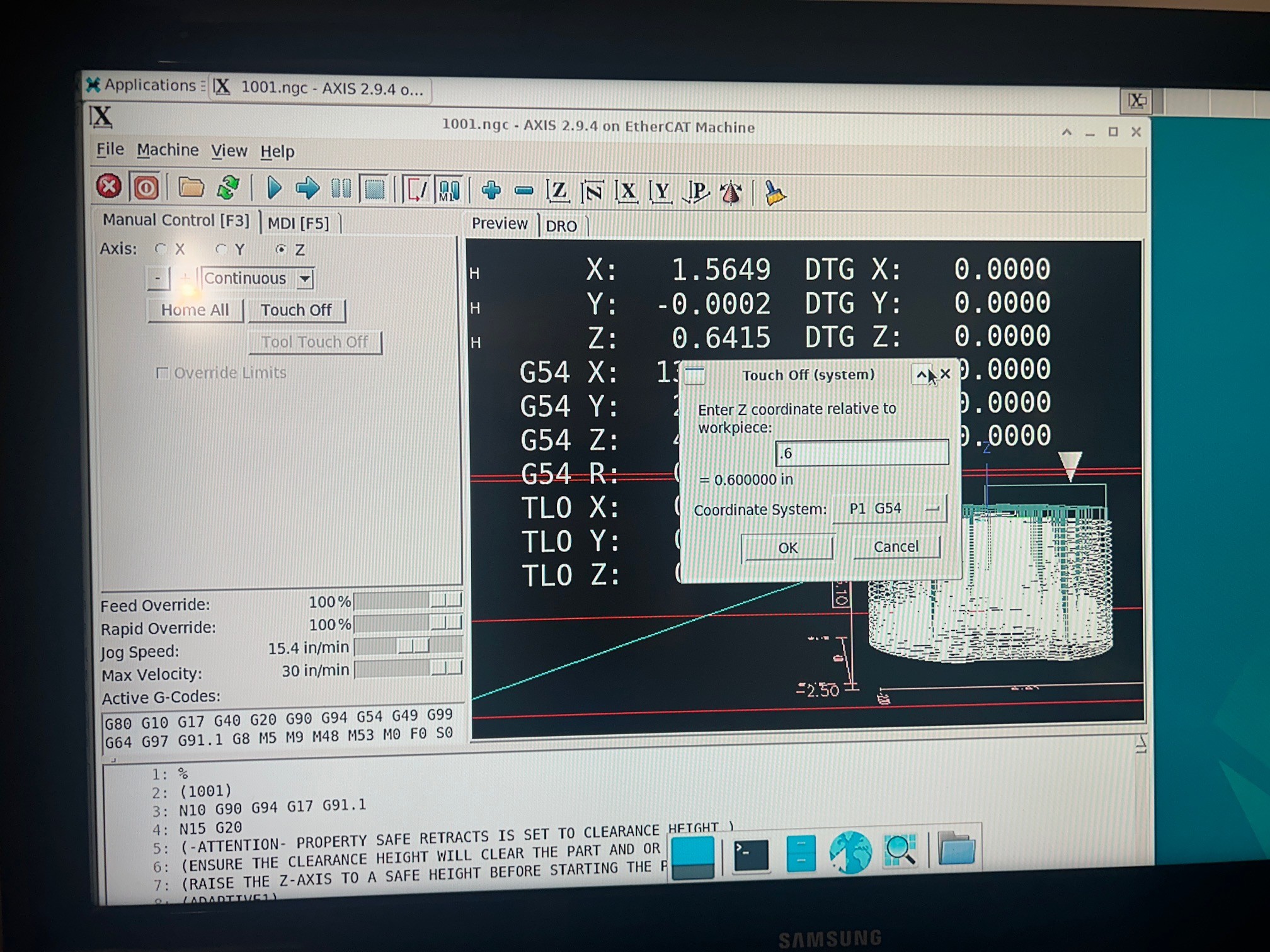
Replied by unknown on topic program exceeds machine maximum
program exceeds machine maximum
Category: General LinuxCNC Questions
- unknown
- unknown
19 Nov 2025 06:16
- farmer_mike
- farmer_mike
19 Nov 2025 05:06 - 19 Nov 2025 05:10
program exceeds machine maximum was created by farmer_mike
program exceeds machine maximum
Category: General LinuxCNC Questions
- gravedigger
- gravedigger
19 Nov 2025 04:55
Replied by gravedigger on topic 7i73 MPG Input MaxVelOverride
7i73 MPG Input MaxVelOverride
Category: PnCConf Wizard
- gravedigger
- gravedigger
19 Nov 2025 04:52
7i73 MPG Input MaxVelOverride was created by gravedigger
7i73 MPG Input MaxVelOverride
Category: PnCConf Wizard
- Hakan
- Hakan
19 Nov 2025 04:51
Time to create page: 0.574 seconds