Search Results (Searched for: )
- amanker
- amanker
27 Oct 2025 18:14
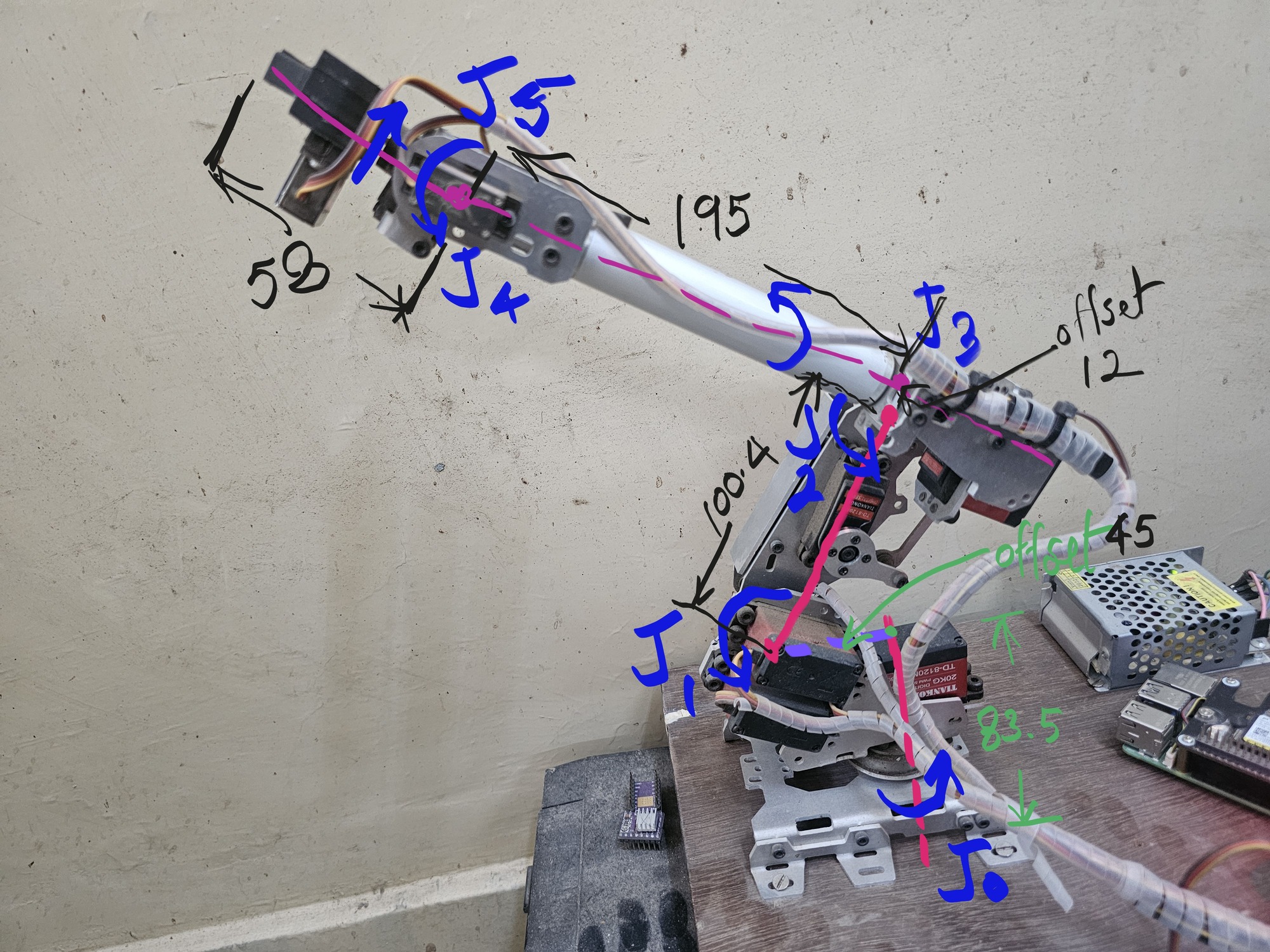
Replied by amanker on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
Need Help in Kinamatics of Small DIY 6dof robotic arm.
Category: Advanced Configuration
- PCW

27 Oct 2025 18:13
- Aciera

27 Oct 2025 17:49
Replied by Aciera on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
Need Help in Kinamatics of Small DIY 6dof robotic arm.
Category: Advanced Configuration
- jc2ktr
- jc2ktr
27 Oct 2025 17:45
- TJ

27 Oct 2025 17:37
")
- amanker
- amanker
27 Oct 2025 17:35
Replied by amanker on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
Need Help in Kinamatics of Small DIY 6dof robotic arm.
Category: Advanced Configuration
- jmp97
- jmp97
27 Oct 2025 17:01 - 27 Oct 2025 18:00
Replied by jmp97 on topic LinuxCNC installation + 7I96S
LinuxCNC installation + 7I96S
Category: Installing LinuxCNC
- kb58
- kb58
27 Oct 2025 16:32 - 27 Oct 2025 17:11
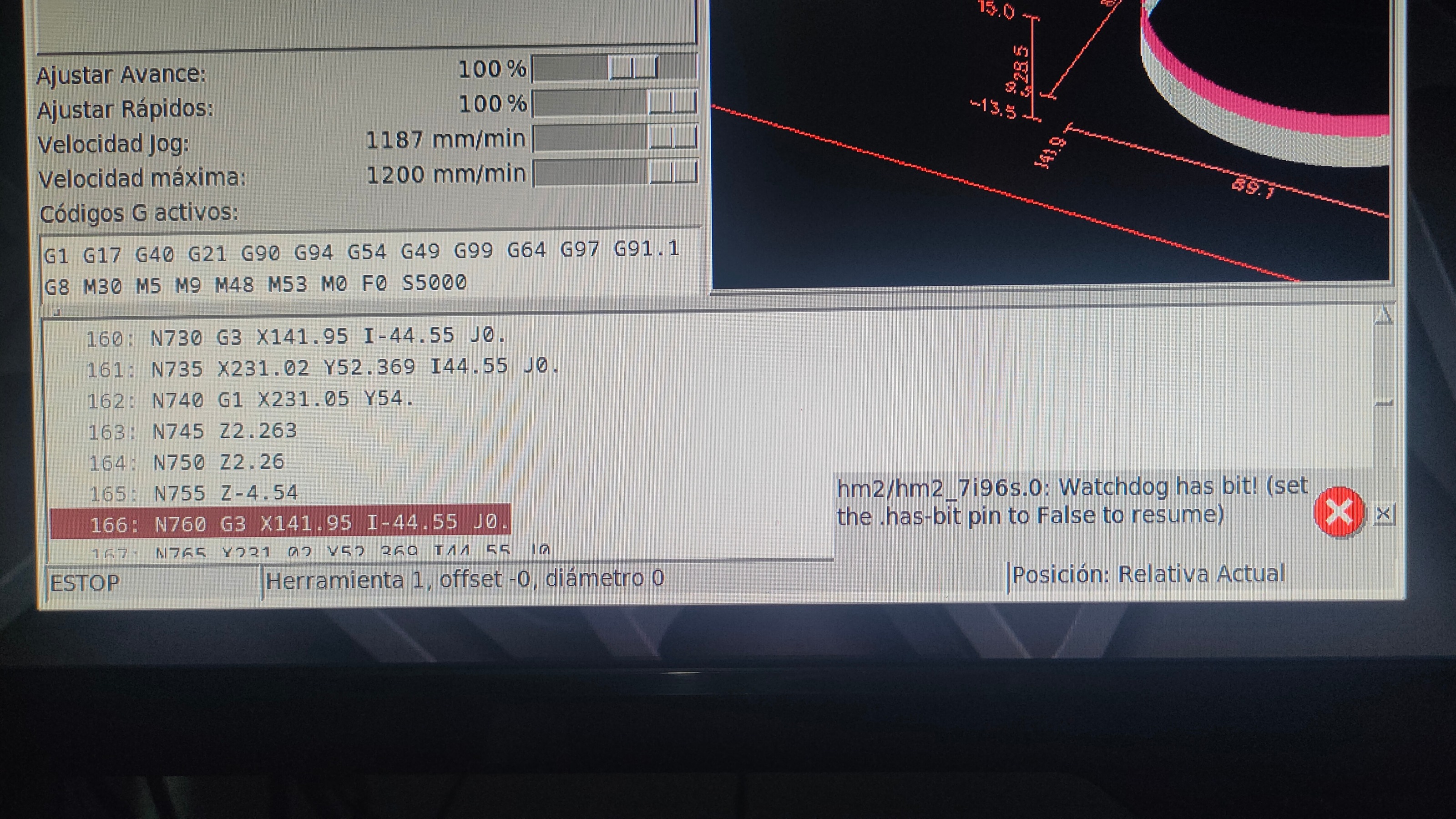
Replied by kb58 on topic Changing starting point on 2D job
Changing starting point on 2D job
Category: General LinuxCNC Questions
- tommylight

27 Oct 2025 16:32
Replied by tommylight on topic LinuxCNC installation + 7I96S
LinuxCNC installation + 7I96S
Category: Installing LinuxCNC
- tommylight
27 Oct 2025 16:27
Replied by tommylight on topic Changing starting point on 2D job
Changing starting point on 2D job
Category: General LinuxCNC Questions
- Snoopyrider
- Snoopyrider
27 Oct 2025 16:10
Replied by Snoopyrider on topic User Install for Probe Basic Py3 (For Machine Control)
User Install for Probe Basic Py3 (For Machine Control)
Category: QtPyVCP
- PCW
27 Oct 2025 16:01
- ihavenofish
- ihavenofish
27 Oct 2025 15:53
Replied by ihavenofish on topic New ethercat / probe basic control for minimonster
New ethercat / probe basic control for minimonster
Category: CNC Machines
- Aciera
27 Oct 2025 15:51
Replied by Aciera on topic Need Help in Kinamatics of Small DIY 6dof robotic arm.
Need Help in Kinamatics of Small DIY 6dof robotic arm.
Category: Advanced Configuration
- Routerworks
- Routerworks
27 Oct 2025 15:43
Replied by Routerworks on topic How to create profile for path that is not closed loop
How to create profile for path that is not closed loop
Category: CAD CAM
Time to create page: 0.368 seconds