(SOLVED!!!) Probe Basic - rotary axis jogging
- spumco
- Offline
- Platinum Member
-

Less
More
- Posts: 2125
- Thank you received: 882
13 Oct 2021 04:30 #222999
by spumco
Probe Basic - rotary axis jogging was created by spumco
Have run in to a snag as I'm setting my my mill and I suspect it's Probe Basic-related and not HAL or INI. Could be wrong, of course.
A-axis/joint-3 is set up as a rotary (typical 4th axis). Steps per degree/unit are fine, and the max velocity is also fine. It is not WRAPPED_ROTARY in the INI file.
When I home the axis it rotates at the expected speed and backs off properly from the home sensor. When I command a move via MDI the speed is also as expected.
However, when I try to jog using the on-screen buttons, it's extremely slow. Feedrate displayed jumps to "100" regardless of the jog % slider, and the axis moves about 1/10th the speed it should. Jog slider has no effect on A-axis, but it works perfectly as expected for X/Y/Z.
Example:
MDI G0A20 is completed in 1 second(ish)
Holding the jog button takes 10 seconds to go from A0 to A20.
It feels like there's some scaling issue internal to PB, and I don't understand why the slider has no effect for one axis only.
Anyone else have a similar issue, or is there some setting I've overlooked?
Thx,
Ralph
A-axis/joint-3 is set up as a rotary (typical 4th axis). Steps per degree/unit are fine, and the max velocity is also fine. It is not WRAPPED_ROTARY in the INI file.
When I home the axis it rotates at the expected speed and backs off properly from the home sensor. When I command a move via MDI the speed is also as expected.
However, when I try to jog using the on-screen buttons, it's extremely slow. Feedrate displayed jumps to "100" regardless of the jog % slider, and the axis moves about 1/10th the speed it should. Jog slider has no effect on A-axis, but it works perfectly as expected for X/Y/Z.
Example:
MDI G0A20 is completed in 1 second(ish)
Holding the jog button takes 10 seconds to go from A0 to A20.
It feels like there's some scaling issue internal to PB, and I don't understand why the slider has no effect for one axis only.
Anyone else have a similar issue, or is there some setting I've overlooked?
Thx,
Ralph
Please Log in or Create an account to join the conversation.
- spumco
- Offline
- Platinum Member
-
Less
More
- Posts: 2125
- Thank you received: 882
14 Oct 2021 22:31 #223131
by spumco
Replied by spumco on topic Probe Basic - rotary axis jogging
It would appear that I'm not the only one to notice this:
github.com/kcjengr/probe_basic/issues/53
Not sure if a second slider is needed, or perhaps someone could check if the jog velocity value is using the linear units instead of the angular units from the basic INI file.
github.com/kcjengr/probe_basic/issues/53
Not sure if a second slider is needed, or perhaps someone could check if the jog velocity value is using the linear units instead of the angular units from the basic INI file.
Please Log in or Create an account to join the conversation.
- Joco
-

- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
14 Oct 2021 23:25 #223135
by Joco
Replied by Joco on topic Probe Basic - rotary axis jogging
Having a quick look at the documentation for machine actions and specificlaly the actions for adjusting jog speed, there are separate ones for linear and angualr velocity. I suspect that could be the issue. But will need to have a snoop at the UI and code once work is over.
The following user(s) said Thank You: spumco
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
15 Oct 2021 08:22 #223176
by Joco
Replied by Joco on topic Probe Basic - rotary axis jogging
I have checked and it would seem there is a gap in how the jog over-ride is implemented. The slide in place is only operating on linear machine speed not on angular speed. Will check with some people closer to UI in case I have missed something.
J.
J.
The following user(s) said Thank You: spumco
Please Log in or Create an account to join the conversation.
- spumco
- Offline
- Platinum Member
-
Less
More
- Posts: 2125
- Thank you received: 882
26 Oct 2021 03:50 #224322
by spumco
Replied by spumco on topic Probe Basic - rotary axis jogging
Any news on this issue?
I'm open to a workaround if necessary, but I'd need some hand-holding if it isn't beginner-level hal pin-signal connection stuff.
I'm open to a workaround if necessary, but I'd need some hand-holding if it isn't beginner-level hal pin-signal connection stuff.
Please Log in or Create an account to join the conversation.
- TurBoss
-

- Offline
- Premium Member
-

Less
More
- Posts: 134
- Thank you received: 81
26 Oct 2021 05:21 #224328
by TurBoss
Replied by TurBoss on topic Probe Basic - rotary axis jogging
if you could create a actionbutton and set ActionName to
machine.jog.axis:a,pos
or
machine.jog.axis:a,neg
machine.jog.axis:a,pos
or
machine.jog.axis:a,neg
Please Log in or Create an account to join the conversation.
- spumco
- Offline
- Platinum Member
-
Less
More
- Posts: 2125
- Thank you received: 882
26 Oct 2021 22:49 #224437
by spumco
Replied by spumco on topic Probe Basic - rotary axis jogging
Maybe I'm nissing something, but there are already actionbuttons with ActionNames set to those values.
The issue is that when pressed, the jog velocity is based on the max linear jog velocity value (inch units), which is inappropriate for an angular axis (degrees)
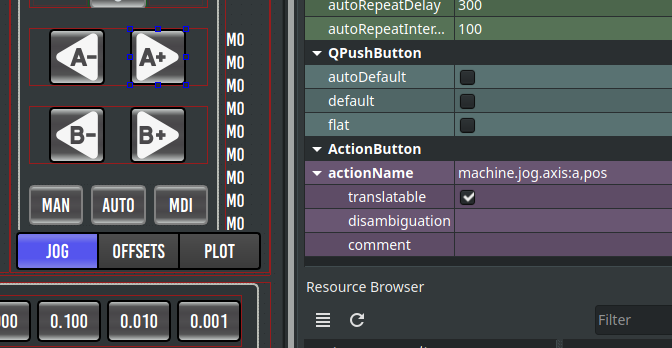
The issue is that when pressed, the jog velocity is based on the max linear jog velocity value (inch units), which is inappropriate for an angular axis (degrees)
Attachments:
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
26 Oct 2021 22:55 #224439
by Joco
Replied by Joco on topic Probe Basic - rotary axis jogging
spumco - I'm working on a framework level fix so this is properly supported going forward. It will also make it (in theory) trival to add a fix into the PB.
Coding is done just needs some broader testing/review.
Cheers - J.
Coding is done just needs some broader testing/review.
Cheers - J.
Please Log in or Create an account to join the conversation.
- spumco
- Offline
- Platinum Member
-
Less
More
- Posts: 2125
- Thank you received: 882
26 Oct 2021 23:01 #224441
by spumco
Replied by spumco on topic Probe Basic - rotary axis jogging
You're my new BFFTM
Thanks much.
Thanks much.
Please Log in or Create an account to join the conversation.
- Joco
-
- Offline
- Platinum Member
-
Less
More
- Posts: 532
- Thank you received: 327
27 Oct 2021 01:23 #224455
by Joco
Replied by Joco on topic Probe Basic - rotary axis jogging
spumco - the way this will be able to be corrected in PB is to create a hidden jog angular % override slider. This will be slaved off the master slider that is visible. This "slaving" is done using normal signal connections to send the value from the master slider to hidden slave slider. Thus when you shift the override jog slider to 70% then it will be 70% of Max Linear and Max Angular velocity as set in INI file. See the documentation for the INI entries that can be used. for default and max angular velocity.
cheers - James.
cheers - James.
Please Log in or Create an account to join the conversation.
Moderators: KCJ, Lcvette
Time to create page: 0.219 seconds