TCP 5-axis kinematics
- jsskangas
- Offline
- Premium Member
-

Less
More
- Posts: 144
- Thank you received: 9
23 Jul 2018 10:20 - 23 Jul 2018 10:30 #114694
by jsskangas
Replied by jsskangas on topic TCP 5-axis kinematics
Hello Andy
First look mu kinematic file.(XYZBCsmkins.c)
There are two M128 and M129 command that switch between two different kinematic model.
Switching can be only done in B0. C0. position.
Both kinematic models works as they supposed to.
Problem is that, some how axis or joint loses it's position during sifting between these two kinematic models.
Between several shifts I managed to get 5mm error to X axis.
Problem is not mechanical or HW related.
I have been running lot higher pulse rates(servo encoder pulses) in 3+2 axis works than in 5 axis.
First look mu kinematic file.(XYZBCsmkins.c)
There are two M128 and M129 command that switch between two different kinematic model.
Switching can be only done in B0. C0. position.
Both kinematic models works as they supposed to.
Problem is that, some how axis or joint loses it's position during sifting between these two kinematic models.
Between several shifts I managed to get 5mm error to X axis.
Problem is not mechanical or HW related.
I have been running lot higher pulse rates(servo encoder pulses) in 3+2 axis works than in 5 axis.
Last edit: 23 Jul 2018 10:30 by jsskangas.
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19886
- Thank you received: 4645
30 Jul 2018 09:21 #115111
by andypugh
Replied by andypugh on topic TCP 5-axis kinematics
This has been sat in my "to answer" pile for a week, and I haven't managed to find the time to look at it in detail.
It sounds like your forward and reverse kinematics might not give _exactly_ the same result. Have you checked this?
I think it is possible to run the kins function from the command line. But I can't recall how one does that.
It sounds like your forward and reverse kinematics might not give _exactly_ the same result. Have you checked this?
I think it is possible to run the kins function from the command line. But I can't recall how one does that.
Please Log in or Create an account to join the conversation.
- jsskangas
- Offline
- Premium Member
-
Less
More
- Posts: 144
- Thank you received: 9
07 Aug 2018 11:12 #115738
by jsskangas
Replied by jsskangas on topic TCP 5-axis kinematics
Hello
Thanks for answer. I need to check kinematics one more time.
Thanks for answer. I need to check kinematics one more time.
Please Log in or Create an account to join the conversation.
- Spetrov
- Offline
- New Member
-

Less
More
- Posts: 1
- Thank you received: 0
24 Aug 2018 14:54 #116549
by Spetrov
Replied by Spetrov on topic TCP 5-axis kinematics
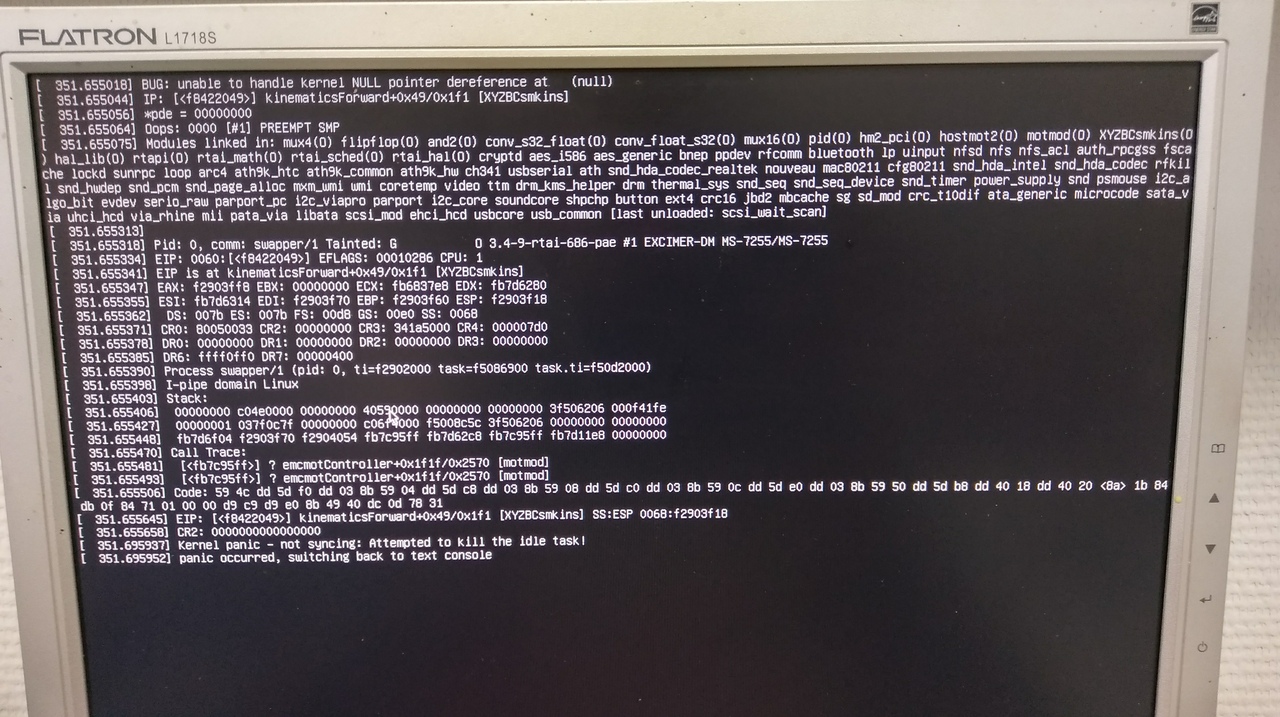
Hi, jsskangas, I tried your kinematics and got an error(on photo), could you help me please?
Even when I compiled your file, I had errors. I myself was able to correct them, but I could be wrong.
Even when I compiled your file, I had errors. I myself was able to correct them, but I could be wrong.
Warning: Spoiler!
make KBUILD_EXTRA_SYMBOLS=/usr/realtime-3.4-9-rtai-686-pae/modules/linuxcnc/Module.symvers -C /usr/src/linux-headers-3.4-9-rtai-686-pae SUBDIRS=`pwd` CC=gcc V=0 modules
make[1]: Entering directory `/usr/src/linux-headers-3.4-9-rtai-686-pae'
CC [M] /tmp/tmpbG6srv/XYZBCsmkins.o
/tmp/tmpbG6srv/XYZBCsmkins.c: In function ‘kinematicsForward’:
/tmp/tmpbG6srv/XYZBCsmkins.c:84:39: error: expected ‘)’ before ‘;’ token
/tmp/tmpbG6srv/XYZBCsmkins.c:124:5: error: expected ‘;’ before ‘}’ token
/tmp/tmpbG6srv/XYZBCsmkins.c:57:26: warning: unused variable ‘FK_Z’ [-Wunused-variable]
/tmp/tmpbG6srv/XYZBCsmkins.c:57:19: warning: unused variable ‘FK_Y’ [-Wunused-variable]
/tmp/tmpbG6srv/XYZBCsmkins.c: In function ‘kinematicsInverse’:
/tmp/tmpbG6srv/XYZBCsmkins.c:168:40: error: expected ‘)’ before ‘;’ token
/tmp/tmpbG6srv/XYZBCsmkins.c:197:5: error: expected ‘;’ before ‘}’ token
/tmp/tmpbG6srv/XYZBCsmkins.c:150:26: warning: unused variable ‘IK_Z’ [-Wunused-variable]
/tmp/tmpbG6srv/XYZBCsmkins.c:150:19: warning: unused variable ‘IK_Y’ [-Wunused-variable]
/tmp/tmpbG6srv/XYZBCsmkins.c: In function ‘init_module’:
/tmp/tmpbG6srv/XYZBCsmkins.c:245:116: error: unknown type name ‘Jussi’
/tmp/tmpbG6srv/XYZBCsmkins.c:245:128: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:172: error: expected ‘=’, ‘,’, ‘;’, ‘asm’ or ‘__attribute__’ before ‘J’
/tmp/tmpbG6srv/XYZBCsmkins.c:245:173: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:175: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:177: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:179: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:181: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:185: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:187: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:189: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:191: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:193: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:195: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:116: warning: ISO C90 forbids mixed declarations and code [-Wdeclaration-after-statement]
/tmp/tmpbG6srv/XYZBCsmkins.c: At top level:
/tmp/tmpbG6srv/XYZBCsmkins.c:265:0: error: unterminated argument list invoking macro "rtapi_app_exit"
/tmp/tmpbG6srv/XYZBCsmkins.c:265:1: error: expected ‘=’, ‘,’, ‘;’, ‘asm’ or ‘__attribute__’ at end of input
make[4]: *** [/tmp/tmpbG6srv/XYZBCsmkins.o] Ошибка 1
make[3]: *** [_module_/tmp/tmpbG6srv] Ошибка 2
make[2]: *** [sub-make] Ошибка 2
make[1]: *** [all] Ошибка 2
make[1]: Leaving directory `/usr/src/linux-headers-3.4-9-rtai-686-pae'
make: *** [modules] Ошибка 2
make[1]: Entering directory `/usr/src/linux-headers-3.4-9-rtai-686-pae'
CC [M] /tmp/tmpbG6srv/XYZBCsmkins.o
/tmp/tmpbG6srv/XYZBCsmkins.c: In function ‘kinematicsForward’:
/tmp/tmpbG6srv/XYZBCsmkins.c:84:39: error: expected ‘)’ before ‘;’ token
/tmp/tmpbG6srv/XYZBCsmkins.c:124:5: error: expected ‘;’ before ‘}’ token
/tmp/tmpbG6srv/XYZBCsmkins.c:57:26: warning: unused variable ‘FK_Z’ [-Wunused-variable]
/tmp/tmpbG6srv/XYZBCsmkins.c:57:19: warning: unused variable ‘FK_Y’ [-Wunused-variable]
/tmp/tmpbG6srv/XYZBCsmkins.c: In function ‘kinematicsInverse’:
/tmp/tmpbG6srv/XYZBCsmkins.c:168:40: error: expected ‘)’ before ‘;’ token
/tmp/tmpbG6srv/XYZBCsmkins.c:197:5: error: expected ‘;’ before ‘}’ token
/tmp/tmpbG6srv/XYZBCsmkins.c:150:26: warning: unused variable ‘IK_Z’ [-Wunused-variable]
/tmp/tmpbG6srv/XYZBCsmkins.c:150:19: warning: unused variable ‘IK_Y’ [-Wunused-variable]
/tmp/tmpbG6srv/XYZBCsmkins.c: In function ‘init_module’:
/tmp/tmpbG6srv/XYZBCsmkins.c:245:116: error: unknown type name ‘Jussi’
/tmp/tmpbG6srv/XYZBCsmkins.c:245:128: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:172: error: expected ‘=’, ‘,’, ‘;’, ‘asm’ or ‘__attribute__’ before ‘J’
/tmp/tmpbG6srv/XYZBCsmkins.c:245:173: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:175: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:177: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:179: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:181: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:185: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:187: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:189: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:191: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:193: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:195: warning: null character(s) ignored [enabled by default]
/tmp/tmpbG6srv/XYZBCsmkins.c:245:116: warning: ISO C90 forbids mixed declarations and code [-Wdeclaration-after-statement]
/tmp/tmpbG6srv/XYZBCsmkins.c: At top level:
/tmp/tmpbG6srv/XYZBCsmkins.c:265:0: error: unterminated argument list invoking macro "rtapi_app_exit"
/tmp/tmpbG6srv/XYZBCsmkins.c:265:1: error: expected ‘=’, ‘,’, ‘;’, ‘asm’ or ‘__attribute__’ at end of input
make[4]: *** [/tmp/tmpbG6srv/XYZBCsmkins.o] Ошибка 1
make[3]: *** [_module_/tmp/tmpbG6srv] Ошибка 2
make[2]: *** [sub-make] Ошибка 2
make[1]: *** [all] Ошибка 2
make[1]: Leaving directory `/usr/src/linux-headers-3.4-9-rtai-686-pae'
make: *** [modules] Ошибка 2
Please Log in or Create an account to join the conversation.
- jsskangas
- Offline
- Premium Member
-
Less
More
- Posts: 144
- Thank you received: 9
25 Aug 2018 05:43 - 25 Aug 2018 07:33 #116570
by jsskangas
Replied by jsskangas on topic TCP 5-axis kinematics
Hello
Yes there seems to be error that has occurred during packing or uploading.
I will take new files.
There is still error at least in forward kinematics.
This is not usable yet.
I will correct kinematics, but at the moment it will take at least 3 weeks until I get fee time for this.
Yes there seems to be error that has occurred during packing or uploading.
I will take new files.
There is still error at least in forward kinematics.
This is not usable yet.
I will correct kinematics, but at the moment it will take at least 3 weeks until I get fee time for this.
Last edit: 25 Aug 2018 07:33 by jsskangas.
Please Log in or Create an account to join the conversation.
- jsskangas
- Offline
- Premium Member
-
Less
More
- Posts: 144
- Thank you received: 9
08 Sep 2018 07:58 - 08 Sep 2018 08:06 #117213
by jsskangas
Replied by jsskangas on topic TCP 5-axis kinematics
Hello andy
I did look into Kinematics, if you look in to exel and use "dxb" at 0.0 value, forward and inverse kinematics are ok.
I removed baxis offset support from kinematics, and still have same behavior
Error must come from somewhere else.
I did look into Kinematics, if you look in to exel and use "dxb" at 0.0 value, forward and inverse kinematics are ok.
I removed baxis offset support from kinematics, and still have same behavior
Error must come from somewhere else.
Last edit: 08 Sep 2018 08:06 by jsskangas.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
11 Sep 2018 14:20 #117332
by andypugh
Replied by andypugh on topic TCP 5-axis kinematics
I wonder if you are not using the correct combinations of motor-pos-cmd, pos-cmd, motor-pos-fb and pos-fb pins in motion, so that a homing offset is being added more than once?
Please Log in or Create an account to join the conversation.
- jsskangas
- Offline
- Premium Member
-
Less
More
- Posts: 144
- Thank you received: 9
22 Sep 2018 14:14 - 22 Sep 2018 14:21 #117867
by jsskangas
Replied by jsskangas on topic TCP 5-axis kinematics
Hello
Homing works well, it is dead on every time when homed.
This error is not homing error, it is not misplaced zeropoint.
if I use only 3 axis kinematics zeropoint will stay on its point.
if I use 3+2 axis machining axis wont drift.
If I change between kinematics, axis will drift.
Somehow this lost of position is related to shifting between 3+2 and full 5-axis kinematics.
I will make video when I have next free time.
Homing works well, it is dead on every time when homed.
This error is not homing error, it is not misplaced zeropoint.
if I use only 3 axis kinematics zeropoint will stay on its point.
if I use 3+2 axis machining axis wont drift.
If I change between kinematics, axis will drift.
Somehow this lost of position is related to shifting between 3+2 and full 5-axis kinematics.
I will make video when I have next free time.
Last edit: 22 Sep 2018 14:21 by jsskangas.
Please Log in or Create an account to join the conversation.
- jsskangas
- Offline
- Premium Member
-
Less
More
- Posts: 144
- Thank you received: 9
10 Oct 2018 17:22 #118643
by jsskangas
Replied by jsskangas on topic TCP 5-axis kinematics
Ok, I found error.
Kinematics are ok and switching between kinematics works well.
X axis offset is not supported at the time.
Problem was lost encoder pulses.
Im running 8000 pulses per mm.
This was too much for hardware to handle.
I need to drop my encoder count for this hardware, sadly.
I would have liked to get everything out from machines accuracy.
Im running 6i25 and 7i77, currently Im not using filtering to get better encoder count rate.
I have 8000count per mm but now Im going to drop it down to 2000 per mm.
Kinematics are ok and switching between kinematics works well.
X axis offset is not supported at the time.
Problem was lost encoder pulses.
Im running 8000 pulses per mm.
This was too much for hardware to handle.
I need to drop my encoder count for this hardware, sadly.
I would have liked to get everything out from machines accuracy.
Im running 6i25 and 7i77, currently Im not using filtering to get better encoder count rate.
I have 8000count per mm but now Im going to drop it down to 2000 per mm.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19886
- Thank you received: 4645
11 Oct 2018 20:04 #118684
by andypugh
Replied by andypugh on topic TCP 5-axis kinematics
OK, I wasn't even considering hardware problems....
Please Log in or Create an account to join the conversation.
Time to create page: 0.185 seconds