- Hardware & Machines
- CNC Machines
- Milling Machines
- Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
- new2linux
- Offline
- Platinum Member
-

Less
More
- Posts: 711
- Thank you received: 9
27 Sep 2020 15:11 - 04 Nov 2020 20:10 #183987
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
So far the only information that I have received is the link below, still waiting from www.regalbeloit.com, the actual motor manufacture.
This is a generic "Motor Current Rating Chart" at this link:
www.magtrolsf.com/media/wysiwyg/tools-fo...lts-fla_chart_v1.pdf
This shows a 1/3HP; 90 VDC is 5.2 full load amp, can I work with this?
Many thanks
Edit: The motor spec sheet for EN444-01 MOTOR is attached. As per motor data: 60VDC; .33HP; & 6.25 AMP
This is a generic "Motor Current Rating Chart" at this link:
www.magtrolsf.com/media/wysiwyg/tools-fo...lts-fla_chart_v1.pdf
This shows a 1/3HP; 90 VDC is 5.2 full load amp, can I work with this?
Many thanks
Edit: The motor spec sheet for EN444-01 MOTOR is attached. As per motor data: 60VDC; .33HP; & 6.25 AMP
Attachments:
Last edit: 04 Nov 2020 20:10 by new2linux. Reason: Add motor spec attachement & number.
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
29 Sep 2020 18:12 #184316
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
I warmly welcome help with the next steps with this project. Many, many, thanks, to JR1050 & tommylight for your help!!
This is "set up" for Current Mode operation:
SW1 (1, 2 & 4 = OFF) (3, 5 & 6 = ON)
POT #1 full CCW (is for Current Mode operation)
POT #2 For a 6amp limit with your drive the math would look like this
[(6Amp)/(7.5Amp)]*12 + 1 = 10.6 turns from fully CCW (This is as per the 6.25 amp; 60 VDC; referenced in the motor EN444-01 specifications in prior post)
This is as far as I have worked through, with AMC tech in the loop. Currently working to get halscope set up.
many thanks!
This is "set up" for Current Mode operation:
SW1 (1, 2 & 4 = OFF) (3, 5 & 6 = ON)
POT #1 full CCW (is for Current Mode operation)
POT #2 For a 6amp limit with your drive the math would look like this
[(6Amp)/(7.5Amp)]*12 + 1 = 10.6 turns from fully CCW (This is as per the 6.25 amp; 60 VDC; referenced in the motor EN444-01 specifications in prior post)
This is as far as I have worked through, with AMC tech in the loop. Currently working to get halscope set up.
many thanks!
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
05 Oct 2020 19:01 - 05 Oct 2020 19:38 #184994
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
This is a better pic of what is set how. Current the machine will run 60 "/min w/o joint error. I do not believe the hal scope is complete, the 0 and 1 axes a set as per tommylight excellent tuning advise. I am not shore this is set up completely?
"On the "hal scope" press "1" at the bottom left and chose "joint.N.motor-pos-cmd" by scrolling down, press "2" and find and choose "joint.N.f-error", set it at "auto" and "roll" on the upper right corner.

"On the "hal scope" press "1" at the bottom left and chose "joint.N.motor-pos-cmd" by scrolling down, press "2" and find and choose "joint.N.f-error", set it at "auto" and "roll" on the upper right corner.
Last edit: 05 Oct 2020 19:38 by new2linux. Reason: new screen shot
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
06 Oct 2020 13:00 #185060
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
For setings for hal scope, I like to look at the joint.N.joint-vel-cmd and and encoder velocity feed back as well as the f-error. Also sometimes it is also helpful to see the pid.N.output. (to be sure you are not ever saturating the command.) Then set the Run Mode and Trigger both to Normal. Set the trigger source channel to the joint.N.joint-vel-cmd and move the trigger level and position sliders to appropriate settings for the move you are testing with. I usualy use an incremental jog using the keyboard (increment length set to a half inch or inch or so) with the jog speed set as fast as I can get and still have a nice steady cruse at the the commanded velocity (not all acceleration and deceleration.) Then adjust the PID parameters according to the tuning tutorials to get the commanded velocity to match the velocity feedback as closely as possible while minimizing the position error. With enough fiddling you should be able to get them to match almost perfectly and the position error to be less than about a half dozen encoder counts.
You may need to play with the vertical gains, Zoom, and horizontal position to get everything nicely visible on the scope. As you improve the tuning you might need to increase the gain on the f-error to better see where you can improve.
You may need to play with the vertical gains, Zoom, and horizontal position to get everything nicely visible on the scope. As you improve the tuning you might need to increase the gain on the f-error to better see where you can improve.
The following user(s) said Thank You: tommylight, new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
06 Oct 2020 15:51 - 06 Oct 2020 16:05 #185090
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Todd, Many, many thanks for your help! I have set up the hal scope as per your reply, and included pic of it. I release that as I tune the scale will need to be changed as to get to the necessary quality of the tuning. The only way to move axes that I have found to work is the "+"&"-" like used with jog (use the mouse pointer) and the axes in question.

The scope 1 through 6 are as follows (1,2,&3=x axes 4,5,&6=y axes):
1) joint.0.joint-vel-cmd
2) f-error
3) pid.x.output
4) joint.1.joint-vel-cmd
5) f-error
6) pid.y.output
Many thanks
Edit: I plan to turn off the x axes (the 1,2 & 3 channels, as to see clearer) as to tune the heavy (y) axes 1st. Will use jog to move axes.
The scope 1 through 6 are as follows (1,2,&3=x axes 4,5,&6=y axes):
1) joint.0.joint-vel-cmd
2) f-error
3) pid.x.output
4) joint.1.joint-vel-cmd
5) f-error
6) pid.y.output
Many thanks
Edit: I plan to turn off the x axes (the 1,2 & 3 channels, as to see clearer) as to tune the heavy (y) axes 1st. Will use jog to move axes.
Attachments:
Last edit: 06 Oct 2020 16:05 by new2linux. Reason: Add the plan
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
06 Oct 2020 16:28 #185092
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
The X axis should jog using the left/right arrow keys on the keyboard, Y axis should be up/down, and Z should be Page Up/Page Down.
In Halscope, work on one axis at a time, Turn off the Y axis pins, and add one for pin "hm2_5i25.0.encoder.00.velocity" (change 00 to the encoder number used for your X-axis). Reduce the gain on the joint.0.joint-vel-cmd, until you can see the cruse section on the screen. Then adjust the gain on the encoder velocity to match. You can then save these settings in Halscope (File/Save Configuration) that you can reload as needed. Save a different configuration for Halscope for each axis you need to tune.
Reduce your P until the over shoot osculations mostly go away. Once you have it smooth, then adjust the FF1 to minimize the following error during the cruse (looks like you may have a little too much FF1 in that screen shot.). Then you can use FF2 to try to smooth out the remaining following error during the acceleration and deceleration portions of the move.
Once you have the Feed Forwards tuned you might be able to add a little more P to stiffen it a bit more without adding too much overshoot.
In Halscope, work on one axis at a time, Turn off the Y axis pins, and add one for pin "hm2_5i25.0.encoder.00.velocity" (change 00 to the encoder number used for your X-axis). Reduce the gain on the joint.0.joint-vel-cmd, until you can see the cruse section on the screen. Then adjust the gain on the encoder velocity to match. You can then save these settings in Halscope (File/Save Configuration) that you can reload as needed. Save a different configuration for Halscope for each axis you need to tune.
Reduce your P until the over shoot osculations mostly go away. Once you have it smooth, then adjust the FF1 to minimize the following error during the cruse (looks like you may have a little too much FF1 in that screen shot.). Then you can use FF2 to try to smooth out the remaining following error during the acceleration and deceleration portions of the move.
Once you have the Feed Forwards tuned you might be able to add a little more P to stiffen it a bit more without adding too much overshoot.
The following user(s) said Thank You: tommylight, new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
06 Oct 2020 17:40 - 06 Oct 2020 17:57 #185104
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Todd, Thank you! The source of the encoder number, is this the correct place? So 00= x axis & 05= y axis. Use a copy and past in text edit or with change? Or will this be inside the Hal file that needs edit?

Edit; I found the other list. Will tune to this. Many thanks!
Edit; I found the other list. Will tune to this. Many thanks!
Attachments:
Last edit: 06 Oct 2020 17:57 by new2linux.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
06 Oct 2020 18:21 - 06 Oct 2020 18:22 #185108
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
The number of the encoder each axis is using will be dependent on where you plugged each one in to the board. It should be noted in your hal file, and you should be able to see what each is connected to in the Halshow window if you click on them.
That image above is very noisy, turn down the gain and hopefully it will be a bit easier to look at.
That image above is very noisy, turn down the gain and hopefully it will be a bit easier to look at.
Last edit: 06 Oct 2020 18:22 by Todd Zuercher.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
06 Oct 2020 19:56 #185128
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Todd, many thanks! This pic shows the current set up using only the channel 1 (N.joint-vel-cmd)& channel 4(hm2-5i25.0.encoder.00.velocity); all others are off, this is the "x" axis only. I need to make these trace look as close as possible to each other, this at approx 40'/min, as in pic. When I start y axis, will have values in the low P (just like this), with low feed rate, work up to 40"/min.
many thanks!
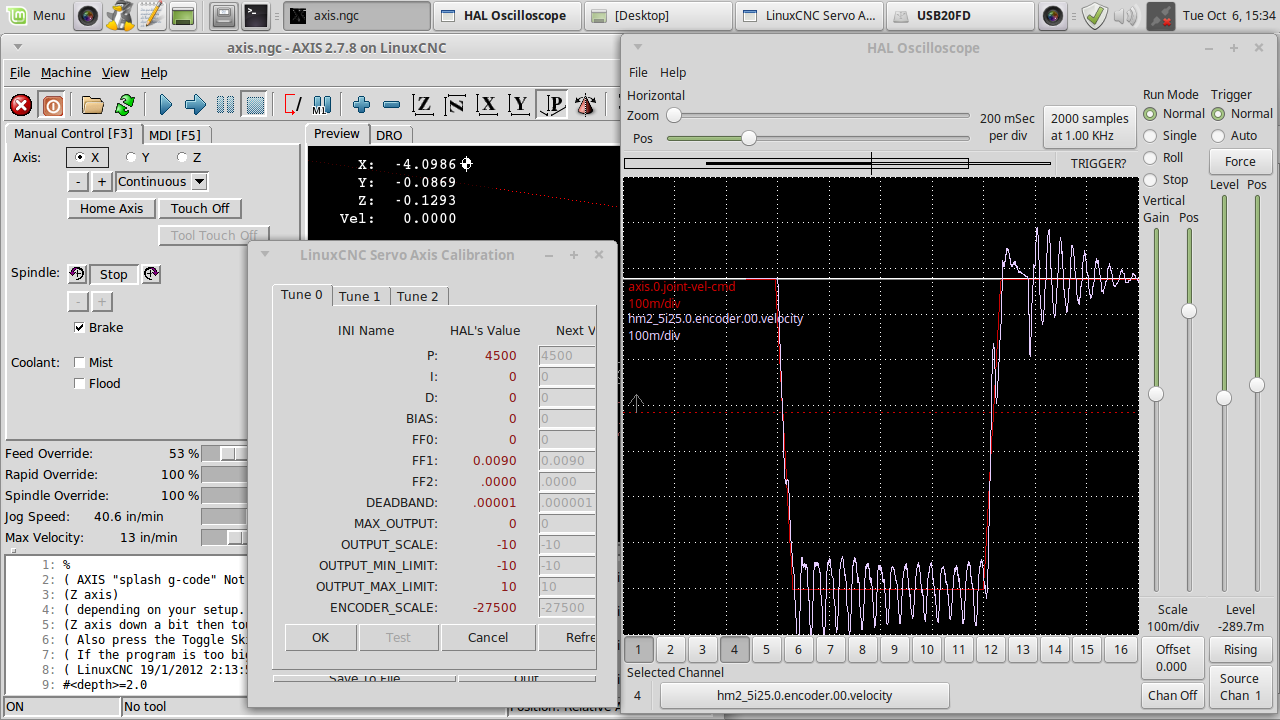
From tommylight post: Example:
say the 0.5 value had a slower rise or fall of the f-error line on the scope, put 0.4 and test again. If the move of the f-error line was slower, lower it a bit more say 0.3 and test again, it it was faster, increase it a bit to 0.45 and test again.
End of example
Am I to look at the height of the line or the amount it goes above the reference line?
many thanks!
From tommylight post: Example:
say the 0.5 value had a slower rise or fall of the f-error line on the scope, put 0.4 and test again. If the move of the f-error line was slower, lower it a bit more say 0.3 and test again, it it was faster, increase it a bit to 0.45 and test again.
End of example
Am I to look at the height of the line or the amount it goes above the reference line?
Attachments:
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
06 Oct 2020 20:15 #185136
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Still too much P, You're trying to get rid of those oscillations. What does it look like with P=2000?
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Time to create page: 0.589 seconds