- Hardware & Machines
- CNC Machines
- Milling Machines
- Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
- new2linux
- Offline
- Platinum Member
-

Less
More
- Posts: 711
- Thank you received: 9
06 Oct 2020 20:46 - 10 Oct 2020 16:26 #185139
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
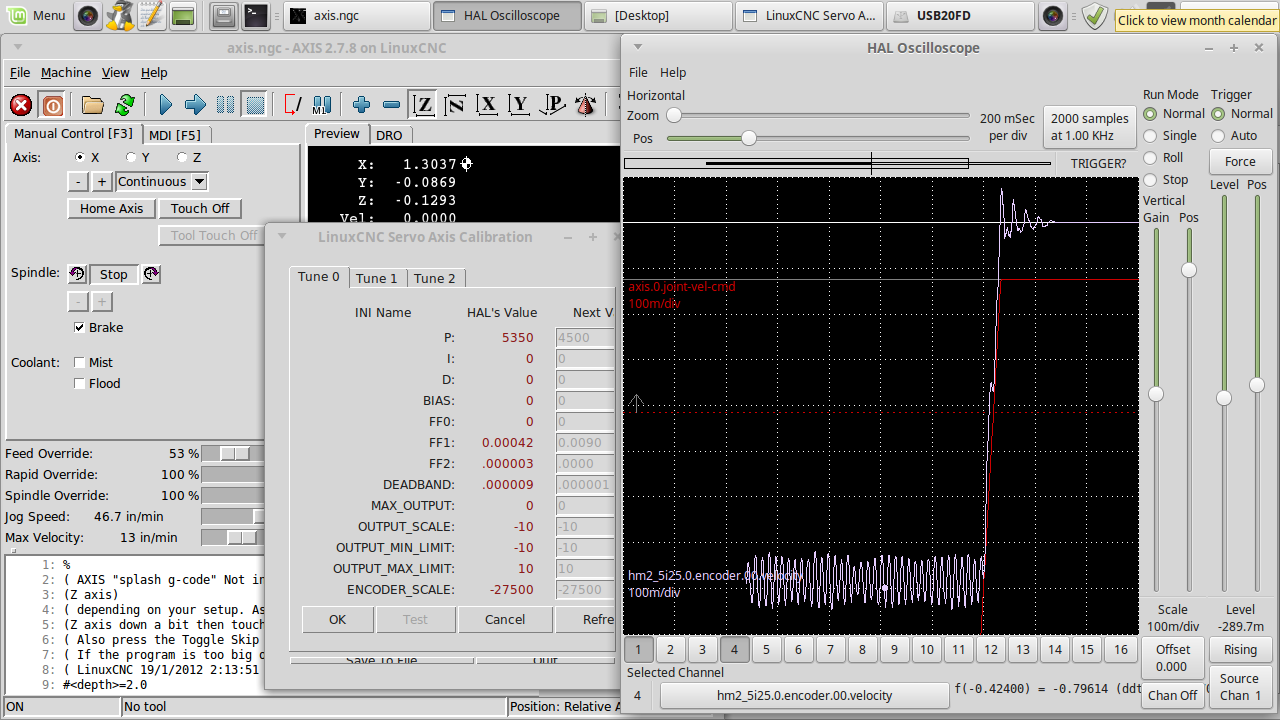
This is most recent, 46.7"/min. some how the original text from this post may not appear.
many thanks!

many thanks!
Last edit: 10 Oct 2020 16:26 by new2linux. Reason: add pic; EDIT; P=5350 Edit:Removed pic.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Online
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
07 Oct 2020 12:33 #185237
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
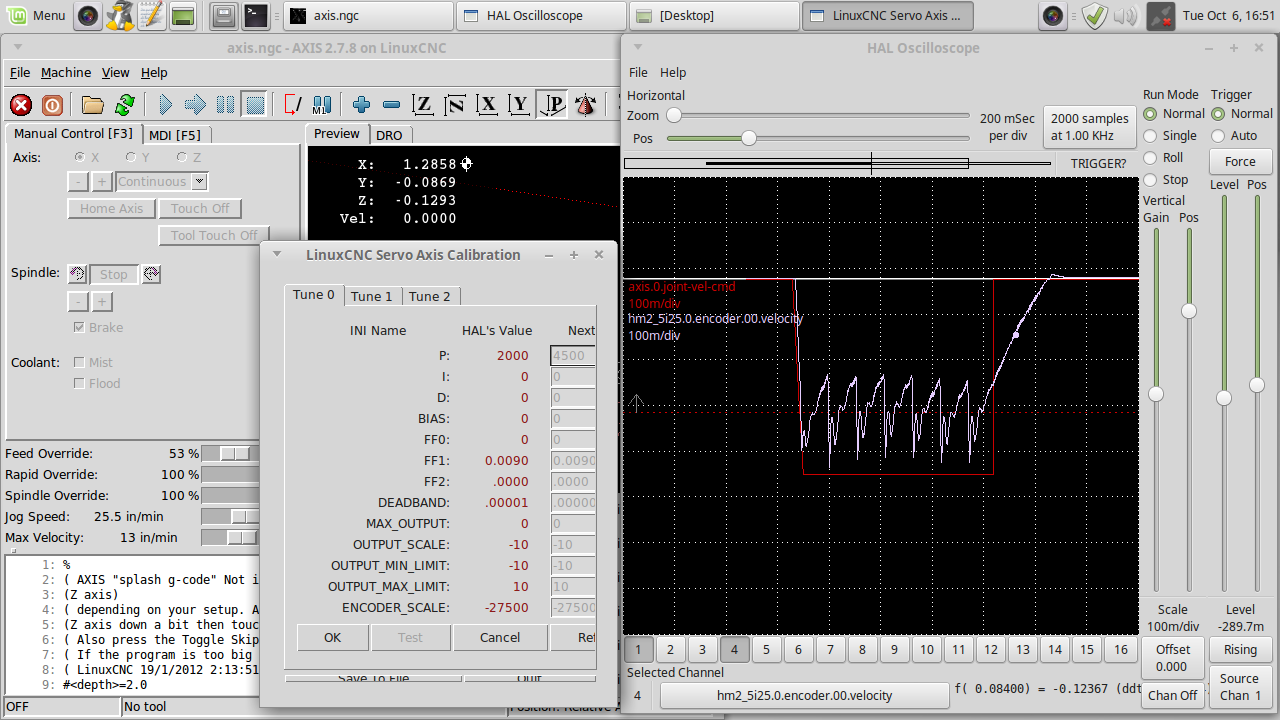
Ok, now with P set to 2000, increase the FF1 until the average velocity feedback matches the commanded velocity during the cruse part of the move.
You need to dial in the feed forwards better before cranking up the P. When the P is set very high it makes it very hard to see what the feed forward terms are doing as you tune them.
The cyclic error during cruse is a little disappointing. Can you describe the mechanics of the axis? Also the drive may need better tuning. Is the drive receiving any form of feedback from the motor for calculating velocity (tach, encoder)?
You need to dial in the feed forwards better before cranking up the P. When the P is set very high it makes it very hard to see what the feed forward terms are doing as you tune them.
The cyclic error during cruse is a little disappointing. Can you describe the mechanics of the axis? Also the drive may need better tuning. Is the drive receiving any form of feedback from the motor for calculating velocity (tach, encoder)?
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
07 Oct 2020 14:57 - 07 Oct 2020 15:01 #185257
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Todd, Thank you. The pic shows the setting as per prior post, need to verify is this ok. The feed is low (10"/min), if I set it higher will have joint error. This axis is the "x" axis of Bridgeport Mill. The motors have encoders (2000 count seems correct) built in. Will it help to add the other channels?
Many thanks!
Edit: When testing axis in question I only compare (or take pic) if the direction is the same (facing machine "x axis" moves to the left) as the other tests.
Many thanks!
Edit: When testing axis in question I only compare (or take pic) if the direction is the same (facing machine "x axis" moves to the left) as the other tests.
Last edit: 07 Oct 2020 15:01 by new2linux.
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Online
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
07 Oct 2020 15:43 #185263
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
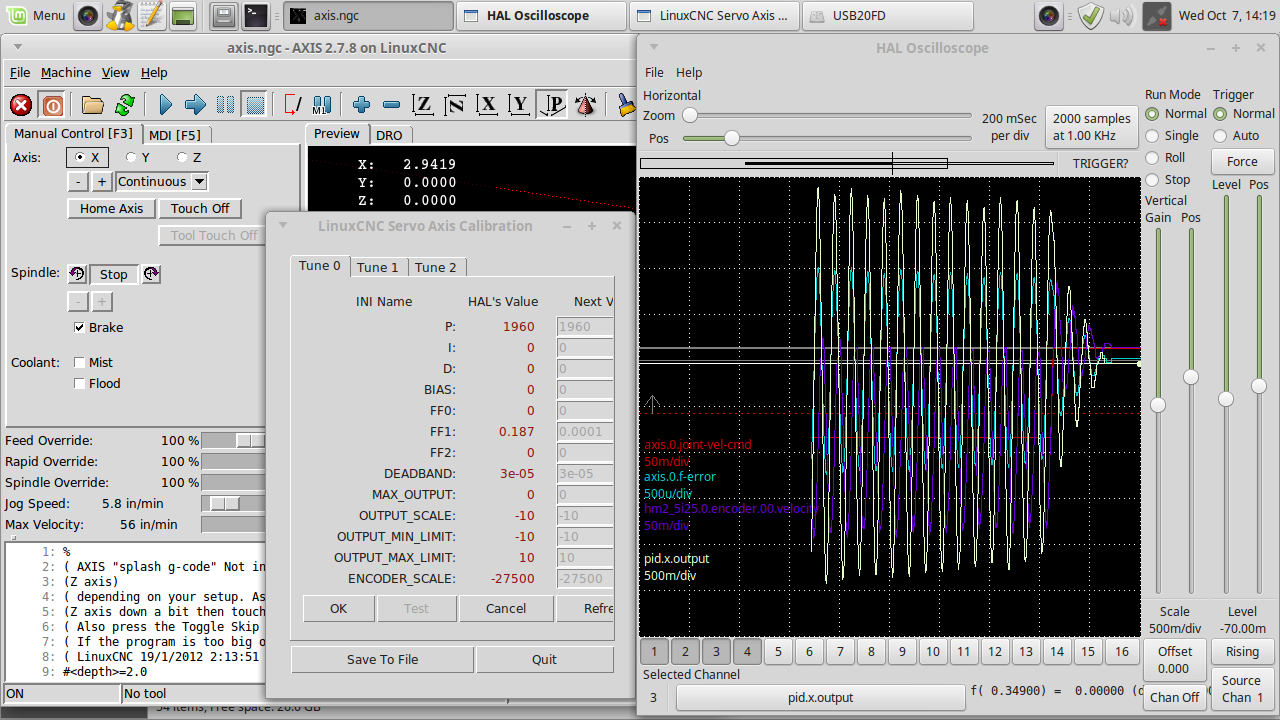
Yes, showing the f-error and the PID output could be helpful.
Is the servo drive receiving any form of feedback from the motor?
Is the servo drive receiving any form of feedback from the motor?
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
07 Oct 2020 16:34 - 07 Oct 2020 18:14 #185277
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Todd, Many thanks. The mill is set up with encoders, the DRO works, how would I check further? The pic shows P=1960 FF1=.187; Feed 5.8"/min. There seems to be this spot in P it will work well with feed. Can't seem to get faster feed rate w/o motor jerking (lack of better term)(verizon is not working well today or yesterday, you type and then it will show up while you wait!) I did not include other channels this pic but will next time.
Edit:Please note D=8 I am reworking this now.
This is P=1960 FF1=.187; Feed 5.8"/min
Edit:Please note D=8 I am reworking this now.
This is P=1960 FF1=.187; Feed 5.8"/min
Attachments:
Last edit: 07 Oct 2020 18:14 by new2linux.
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21632
- Thank you received: 7387
07 Oct 2020 16:44 #185280
by tommylight
Replied by tommylight on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
This is the second time Todd is asking the same thing and never got the answer from you !!!!
Is the servo drive receiving any form of feedback from the motor?
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
07 Oct 2020 16:53 - 07 Oct 2020 18:32 #185282
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
tommylight, thank you for all the time and effort you and others like Todd put in, I cannot express my thanks enough to you and all the rest that make this place work. I will try to do better.
The question about "feed back from motor" can the controller run the sample: "LinuxCnc logo" cutter path w/o having the encoder working? This currently will stop at all appropriate places.
Many, many thanks!
The question about "feed back from motor" can the controller run the sample: "LinuxCnc logo" cutter path w/o having the encoder working? This currently will stop at all appropriate places.
Many, many thanks!
Last edit: 07 Oct 2020 18:32 by new2linux. Reason: feed back from motor
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Online
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
07 Oct 2020 18:53 - 07 Oct 2020 18:54 #185291
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Is there encoder feed back or a tacho feedback connected to the drive?
It is pertinent to the subject of tuning, because the drive can't control the velocity loop without some form of velocity feedback. Some drives (most commonly brushed dc) can sort of fake it using the voltage in the power feed lines to kind of read the back emf from the motor and guess at the velocity. But even when that is an option, the drive usually must be properly configured for it. If you have no velocity feedback to the servo drive, the drive will be acting as a "dumb" amp, giving you only a torque command input instead of a velocity command input. Tuning a torque/position loop is trickier than tuning a velocity/position loop, and may require a faster servo thread speed than the standard 1kHz to get good results.
This is why I keep asking the question.
It is pertinent to the subject of tuning, because the drive can't control the velocity loop without some form of velocity feedback. Some drives (most commonly brushed dc) can sort of fake it using the voltage in the power feed lines to kind of read the back emf from the motor and guess at the velocity. But even when that is an option, the drive usually must be properly configured for it. If you have no velocity feedback to the servo drive, the drive will be acting as a "dumb" amp, giving you only a torque command input instead of a velocity command input. Tuning a torque/position loop is trickier than tuning a velocity/position loop, and may require a faster servo thread speed than the standard 1kHz to get good results.
This is why I keep asking the question.
Last edit: 07 Oct 2020 18:54 by Todd Zuercher.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
07 Oct 2020 19:15 #185293
by new2linux
Replied by new2linux on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Todd, Many thanks for the explanation. I hardly know what to say, my thinking is clear now. It was my belief (I reached out to confirm with techs, prior to order, this was exact replacement for 12A8 A-M-C brushed type) that these current amplifiers were exact replacement. It was my hope that I was buying reliability with the new model. What do I need to make the project work?
Or maybe, I have a set of 12A8s that I have no experience with, (from Ebay) that look brand new. Should I try this. From earlier post I read that this was the real way to make it work. This is what was working.
Is there an advantage (any kind of clear advantage?) to the modern style or is the original 12a8 (price $) all that is necessary?
many thanks
Or maybe, I have a set of 12A8s that I have no experience with, (from Ebay) that look brand new. Should I try this. From earlier post I read that this was the real way to make it work. This is what was working.
Is there an advantage (any kind of clear advantage?) to the modern style or is the original 12a8 (price $) all that is necessary?
many thanks
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Online
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
07 Oct 2020 19:44 #185298
by Todd Zuercher
Replied by Todd Zuercher on topic Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
You almost certainly have the right replacement drive. You just need to double check that you have it configured correctly. I don't know the exact model you have (And I couldn't tell you anything about it without documentation.) Did your old drive use encoder or tacho feedback to the DRIVE (not the control). The encoder feedback is always nessisary for the control, but it is optional for the drive. An old analog drive usually will not use the encoder feedback, only a tacho. The new drive may only have the digital encoder feedback option, or it could have the other, or even the option of both. But I can't tell you what you have, and am not familiar with the product to tell you how to configure it.
If your old drives were not using any feedback, then they were likely using the back emf from the motor. Your new drive would likely still have that option, but I wouldn't know how to set it up. If the new drive has the option of connecting the encoder feedback to use as a velocity feedback, I would strongly recommend doing so. The encoder signal can be shared and connected to both the drive and Linuxcnc, to provide feedback for both.
So far what we are seeing in your tuning results seem point to the drive not seeing a velocity feedback. (or at least not having a tuned velocity loop.)
If your old drives were not using any feedback, then they were likely using the back emf from the motor. Your new drive would likely still have that option, but I wouldn't know how to set it up. If the new drive has the option of connecting the encoder feedback to use as a velocity feedback, I would strongly recommend doing so. The encoder signal can be shared and connected to both the drive and Linuxcnc, to provide feedback for both.
So far what we are seeing in your tuning results seem point to the drive not seeing a velocity feedback. (or at least not having a tuned velocity loop.)
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- Replacing Advanced Motion Controls "brush type 12A8 with "Axcent" amplifier
Time to create page: 0.838 seconds