Remora - ethernet NVEM / EC300 / EC500 cnc board
- scotta
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

- Posts: 959
- Thank you received: 489
Hi, for the MPG the encoder counting is done in LinuxCNC using the normal inputs as the speed is low. The PRUencoder module is used for the hardware based encoder modules. The NVEM is limited on Inputs, but please check the EC500 configuration below with the NVEM configuration to identify which inputs are available for the QDC encoder module.Good morning guys, I bought my nvem v5 board to test with linuxcnc, I'm still waiting, I saw in the files that there is an encoder component to compile in linuxcnc to use in remora, this component was created to only accept the mpg encoder or is there a possibility of using the mpg input to connect an encoder to a spindle or the spindle shaft of a lathe, I don't know if it is possible to use just the mpg encoder input or there is a way to use other inputs if configured, could you give me more details of this part of the encoder on the nvem board? thank you in advance thank you very much
Remora-RT1052-cpp/LinuxCNC/ec500-rt1052-DMA-ENC.txt at main · scottalford75/Remora-RT1052-cpp
Remora-RT1052-cpp/LinuxCNC/nvem-rt1052.txt at main · scottalford75/Remora-RT1052-cpp
Please Log in or Create an account to join the conversation.
- scotta
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 959
- Thank you received: 489
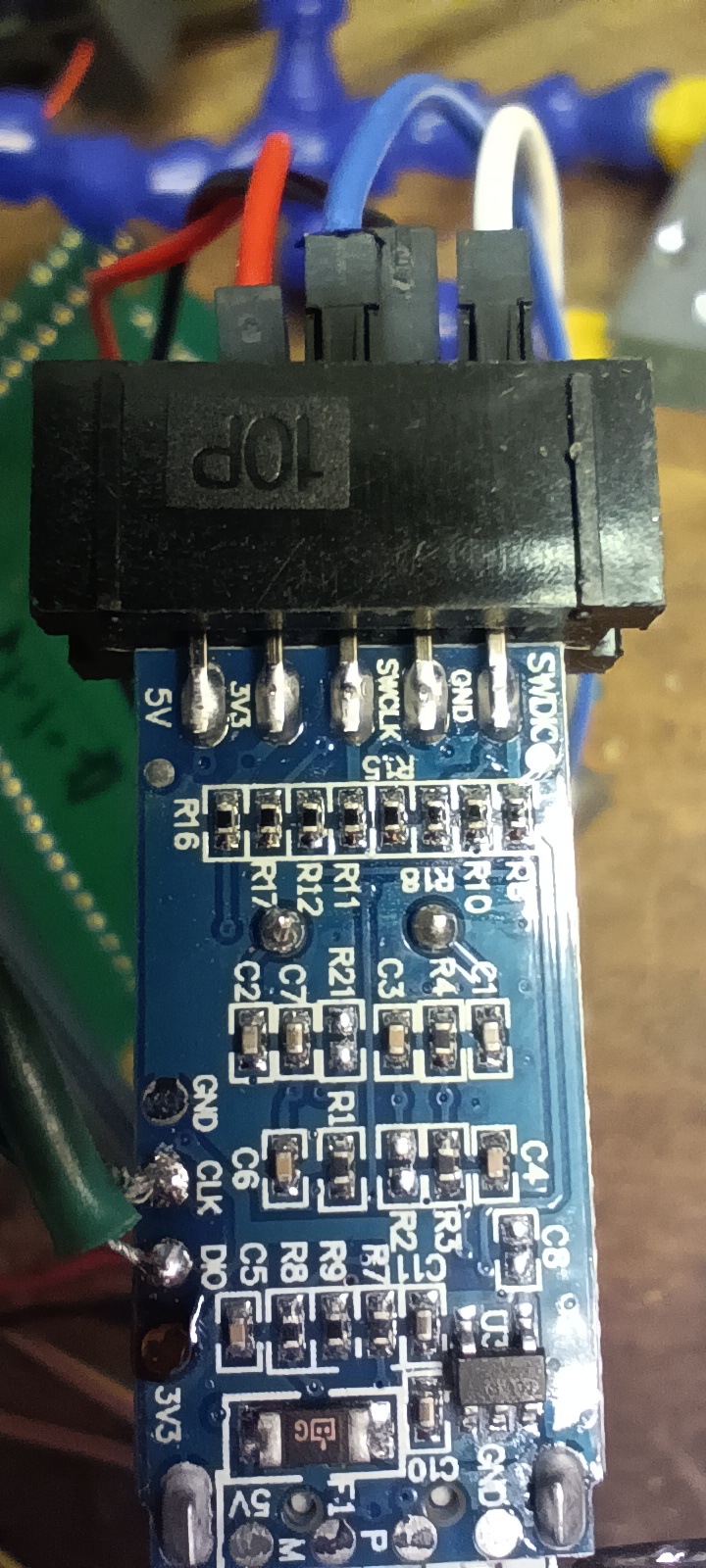
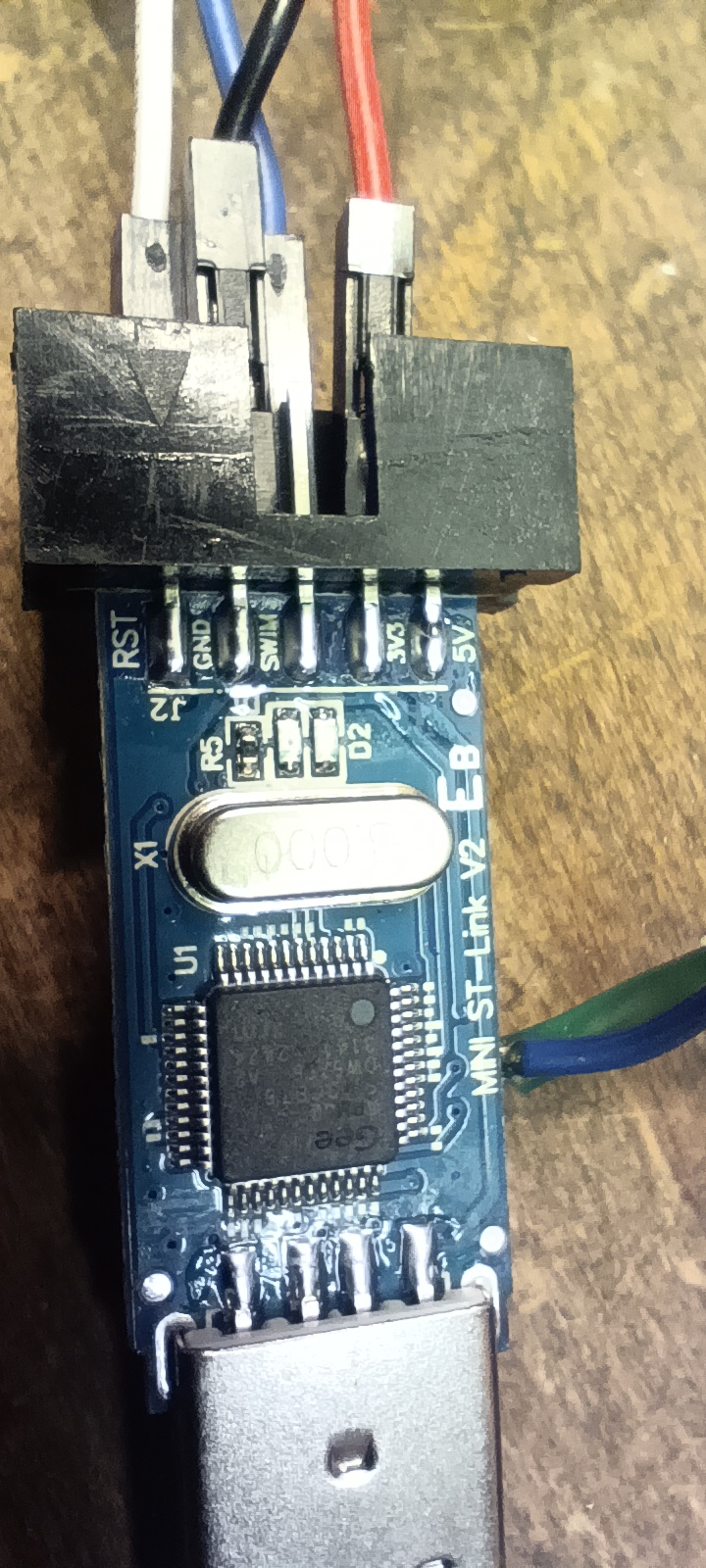
The pyocd warning is hinting that the command line is not correct and it's defaulting the generic target type that cannot flash memory.Hello all
I now have installed pyocd, but no luck with connecting. I guess it should show a target id here ?
xx@xxxxxx:~# pyocd list
# Probe/Board Unique ID Target
0 X893 ARM CMSIS-DAP 0001A0000000 n/a
Flashing fails then too:
xx@xxxxxx:~# pyocd flash /home/bf/Downloads/remora-rt1052-3.1.3.bin –-target mimxrt1050_quadspi
0000497 W Generic 'cortex_m' target type is selected by default; is this intentional? You will be able to debug most devices, but not program flash. To set the target type use the '--target' argument or 'target_override' option. Use 'pyocd list --targets' to see available targets types. [board]
0000674 I Loading /home/bf/Downloads/remora-rt1052-3.1.3.bin [load_cmd]
0000690 C No boot memory is defined for this device [__main__]
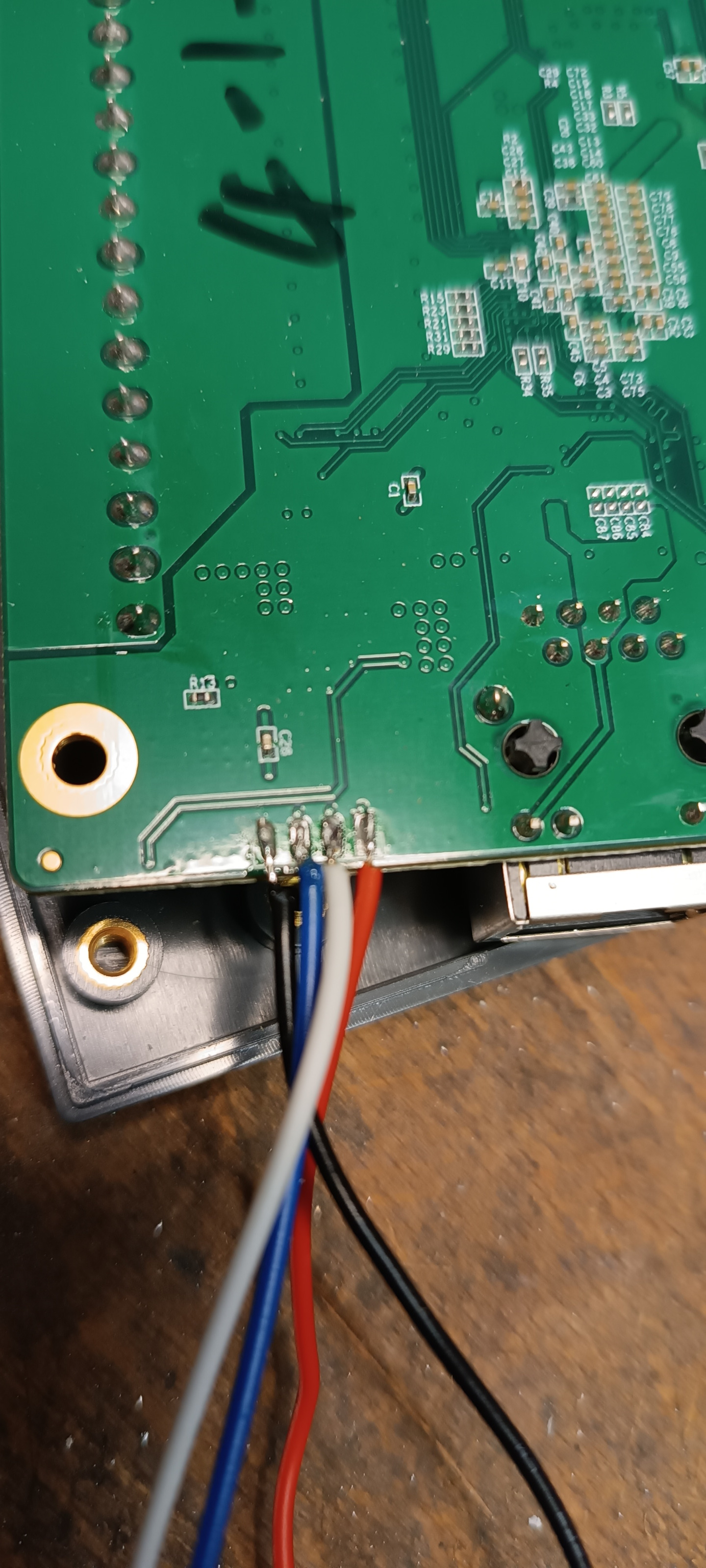
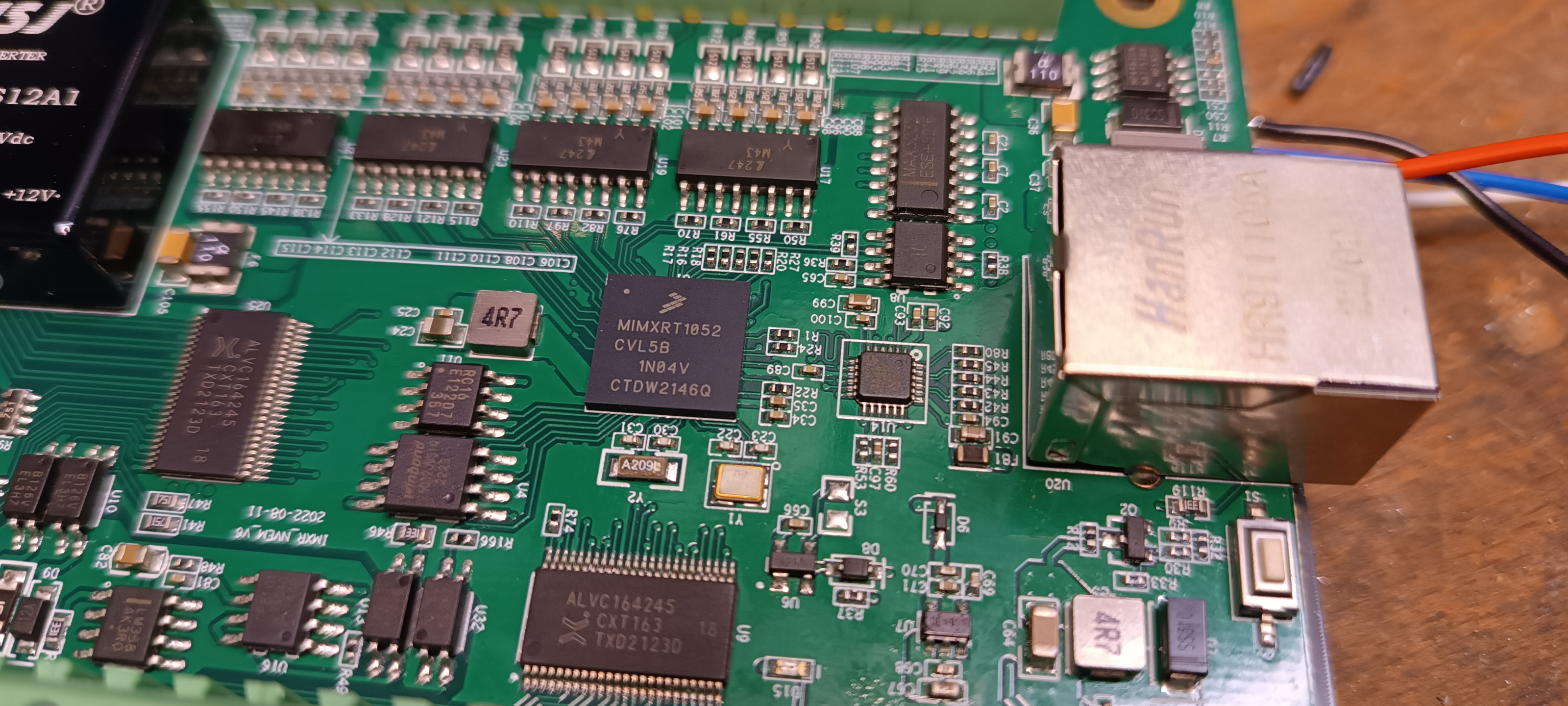
Anything wrong with the wiring ? I got 24v supplied to the remora board
-
schnellmued
pyOCD/docs/target_support.md at main · pyocd/pyOCD
Is there a typo in the command line arguments?
Please Log in or Create an account to join the conversation.
- Thayloreing
- Offline
- Premium Member
-

- Posts: 94
- Thank you received: 3
Please Log in or Create an account to join the conversation.
- schnellmued
- Offline
- New Member
-

- Posts: 14
- Thank you received: 1
Flashing fails then too:
xx@xxxxxx:~# pyocd flash /home/bf/Downloads/remora-rt1052-3.1.3.bin –-target mimxrt1050_quadspi
0000497 W Generic 'cortex_m' target type is selected by default; is this intentional? You will be able to debug most devices, but not program flash. To set the target type use the '--target' argument or 'target_override' option. Use 'pyocd list --targets' to see available targets types. [board]
0000674 I Loading /home/bf/Downloads/remora-rt1052-3.1.3.bin [load_cmd]
0000690 C No boot memory is defined for this device [__main__]
The pyocd warning is hinting that the command line is not correct and it's defaulting the generic target type that cannot flash memory.
pyOCD/docs/target_support.md at main · pyocd/pyOCD
Is there a typo in the command line arguments?
I used the "--target" option, like show in the help output, but i found the variable "target" in "board.py" was allsways "None". So i did the quick & very dirty fix to change default to my board:
# As a last resort, default the target to 'cortex_m'.
if target is None:
target = 'cortex_m'
to
# As a last resort, default the target to 'cortex_m'.
if target is None:
target = 'mimxrt1050_quadspi'
Finaly it flashed the board and i got it connected to linuxcnc

-
schnellmued
Please Log in or Create an account to join the conversation.
- viaj2901
- Offline
- New Member
-
- Posts: 2
- Thank you received: 0
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

- Posts: 4718
- Thank you received: 2114
Your post has been moved to:
forum.linuxcnc.org/qtvcp/54583-call-cust...om-gui-button#315401
Please Log in or Create an account to join the conversation.
- Murphy
- Offline
- Elite Member
-

- Posts: 162
- Thank you received: 5
Please Log in or Create an account to join the conversation.
- cakeslob
- Offline
- Platinum Member
-
- Posts: 926
- Thank you received: 278
Sorry, I didn't understand the translation well, I don't speak English, in this case the remora doesn't support high pulse frequencies due to the limited hardware, does the ec 500 and ec300 have an input for high pulse frequency encoders? Or does it only allow you to make an extension module for the encoder? If so, what would this expansion module be like? Is there anything ready? and how would you add it? Sorry for the number of questions, I'm very interested in this project
It is supported, but refer to Murphys post, the limitation is in the board hardware.
My problem is now that if I jog with my keyboard and after i dont press anything sometimes the motors still do 1 or 2 steps. And i cant figure out why. Maybe someone has the same motion controller with linuxcnc or could help me?Thank you
It is related to the motor tuning setting in Remora/Linuxcnc
Please Log in or Create an account to join the conversation.
- cncmiljc
- Offline
- Junior Member
-

- Posts: 31
- Thank you received: 0
Please Log in or Create an account to join the conversation.
- cncmiljc
- Offline
- Junior Member
-
- Posts: 31
- Thank you received: 0
Please Log in or Create an account to join the conversation.