Fryer MB-11 Bed Mill Retrofit
- adamj12b
-
 Topic Author
Topic Author
- Offline
- Senior Member
-

Less
More
- Posts: 45
- Thank you received: 5
10 Aug 2017 17:16 #97306
by adamj12b
Replied by adamj12b on topic Fryer MB-11 Bed Mill Retrofit
Awesome Info. I will try it tonight! Im currently using the default 1khz servo thread.
My computer tops out on the latency test at about 20000ns. From what I read this is find for a mesa interface setup.
When I started with a low P = 50 value, there was not even enough command to make the motor shaft turn. At 500 I think was the point it started to turn.
As for the current tuning, this was just to get a locked servo that could be used for testing. It has a ring at the start and end of a move but is decently stable. I can rapid the machine currently at 254IPM and stay withing the following error, but the servos should have the ability to run the machine up to 300IPM. that my goal.
-Adam
My computer tops out on the latency test at about 20000ns. From what I read this is find for a mesa interface setup.
When I started with a low P = 50 value, there was not even enough command to make the motor shaft turn. At 500 I think was the point it started to turn.
As for the current tuning, this was just to get a locked servo that could be used for testing. It has a ring at the start and end of a move but is decently stable. I can rapid the machine currently at 254IPM and stay withing the following error, but the servos should have the ability to run the machine up to 300IPM. that my goal.
-Adam
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19879
- Thank you received: 4643
10 Aug 2017 19:53 #97312
by andypugh
If you are currently tuning bare motors, then you might as well stop until they are fitted to the machine. The tuning will be completely different under load. (you will probably end up with even more P-gain)
Replied by andypugh on topic Fryer MB-11 Bed Mill Retrofit
What I did was set the P gain until I could not fight the servo any more, but also didn't have excessive oscillations. 6000 was stronger but I could not stop the oscillations without a load on the servo.
If you are currently tuning bare motors, then you might as well stop until they are fitted to the machine. The tuning will be completely different under load. (you will probably end up with even more P-gain)
Please Log in or Create an account to join the conversation.
- adamj12b
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 45
- Thank you received: 5
12 Aug 2017 02:39 #97353
by adamj12b
Replied by adamj12b on topic Fryer MB-11 Bed Mill Retrofit
Tonight I did some testing while talking to PCW on IRC. He suggested there might be a wiring issue, but I seem to have found something strange.
PCW suggested set all gains to 0 and set P to 10. He said also set both errors to 2.
While watching axis.1.f-error and the analogout1, the max output at a 1" error is 0.005V... 5mV!! For every digit I add to the gain, 10, 100, 1000, 10000, the output increases by the same. 0.005, 0.05, 0.5, 5.0. Using this, I found that P = 20000 creates a 10V output. However, this also makes the loop super sensitive. Something like 0.0006" error will create a 10V output.
I tried adjusting all the scale and min/max outputs but nothing would change the output.
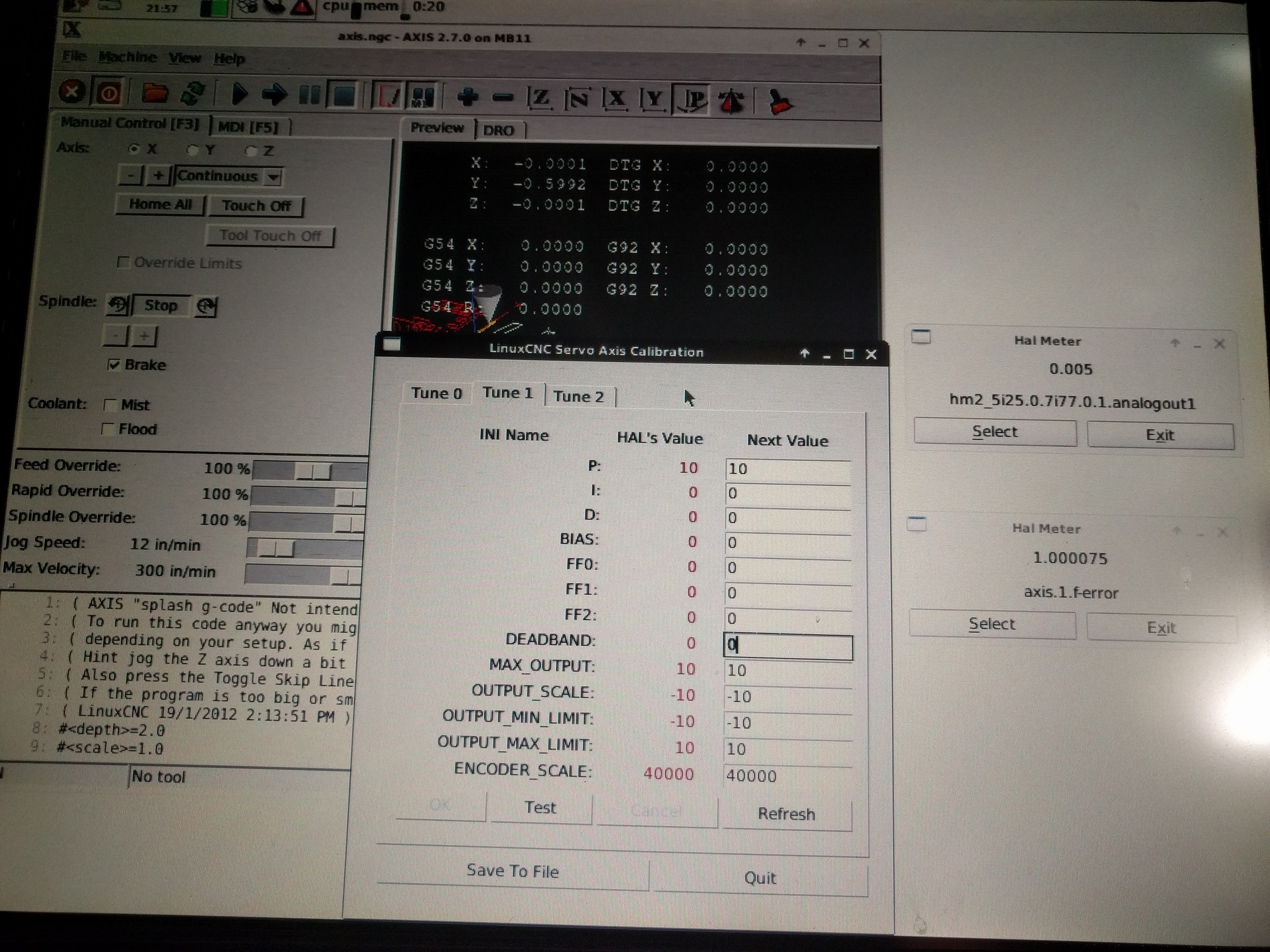
Here are the settings the tests were performed at.
PCW suggested set all gains to 0 and set P to 10. He said also set both errors to 2.
While watching axis.1.f-error and the analogout1, the max output at a 1" error is 0.005V... 5mV!! For every digit I add to the gain, 10, 100, 1000, 10000, the output increases by the same. 0.005, 0.05, 0.5, 5.0. Using this, I found that P = 20000 creates a 10V output. However, this also makes the loop super sensitive. Something like 0.0006" error will create a 10V output.
I tried adjusting all the scale and min/max outputs but nothing would change the output.
Here are the settings the tests were performed at.
FERROR = 2.0
MIN_FERROR = 2.0
MAX_VELOCITY = 5.0
MAX_ACCELERATION = 10.0
P = 10
I = 0
D = 0
FF0 = 0.0
FF1 = 0
FF2 = 0
BIAS = 0.0
DEADBAND = 0.0
MAX_OUTPUT = 10.0
ENCODER_SCALE = 40000.0
OUTPUT_SCALE = -10.0
OUTPUT_MIN_LIMIT = -10.0
OUTPUT_MAX_LIMIT = 10.0Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-
Less
More
- Posts: 17991
- Thank you received: 5281
12 Aug 2017 03:21 #97354
by PCW
Replied by PCW on topic Fryer MB-11 Bed Mill Retrofit
Can you post your hal and ini files?
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4643
12 Aug 2017 11:27 #97363
by andypugh
Replied by andypugh on topic Fryer MB-11 Bed Mill Retrofit
Is pid.N.error identically equal to the f-error? They should be the same number.
Please Log in or Create an account to join the conversation.
- adamj12b
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 45
- Thank you received: 5
12 Aug 2017 13:38 #97374
by adamj12b
Replied by adamj12b on topic Fryer MB-11 Bed Mill Retrofit
Hello PCW,
Here are the files.
INI: www.dropbox.com/s/vogaayxgw8ewbd3/MB11.ini?dl=0
HAL: www.dropbox.com/s/68cct21zdesmo1a/MB11.hal?dl=0
Hello Andy,
Yes, They match exactly.
Here are the files.
INI: www.dropbox.com/s/vogaayxgw8ewbd3/MB11.ini?dl=0
HAL: www.dropbox.com/s/68cct21zdesmo1a/MB11.hal?dl=0
Hello Andy,
Yes, They match exactly.
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
Less
More
- Posts: 17991
- Thank you received: 5281
12 Aug 2017 14:28 - 12 Aug 2017 14:35 #97378
by PCW
Replied by PCW on topic Fryer MB-11 Bed Mill Retrofit
Can you please attach the files to the forum and not link to a commercial service that requires a login?
Last edit: 12 Aug 2017 14:35 by PCW.
Please Log in or Create an account to join the conversation.
- adamj12b
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 45
- Thank you received: 5
12 Aug 2017 14:43 #97380
by adamj12b
Replied by adamj12b on topic Fryer MB-11 Bed Mill Retrofit
Please Log in or Create an account to join the conversation.
- andypugh
-
- Offline
- Moderator
-
Less
More
- Posts: 19879
- Thank you received: 4643
12 Aug 2017 14:52 #97381
by andypugh
Replied by andypugh on topic Fryer MB-11 Bed Mill Retrofit
Aha, that's a PnCConf bug i thought it had been fixed.
setp pid.x.maxerror .0005
setp pid.y.maxerror .0005
setp pid.z.maxerror .0005
Delete those lines, or make the value 0.
setp pid.x.maxerror .0005
setp pid.y.maxerror .0005
setp pid.z.maxerror .0005
Delete those lines, or make the value 0.
Please Log in or Create an account to join the conversation.
- adamj12b
-
Topic Author
- Offline
- Senior Member
-
Less
More
- Posts: 45
- Thank you received: 5
12 Aug 2017 15:04 - 12 Aug 2017 15:05 #97382
by adamj12b
Replied by adamj12b on topic Fryer MB-11 Bed Mill Retrofit
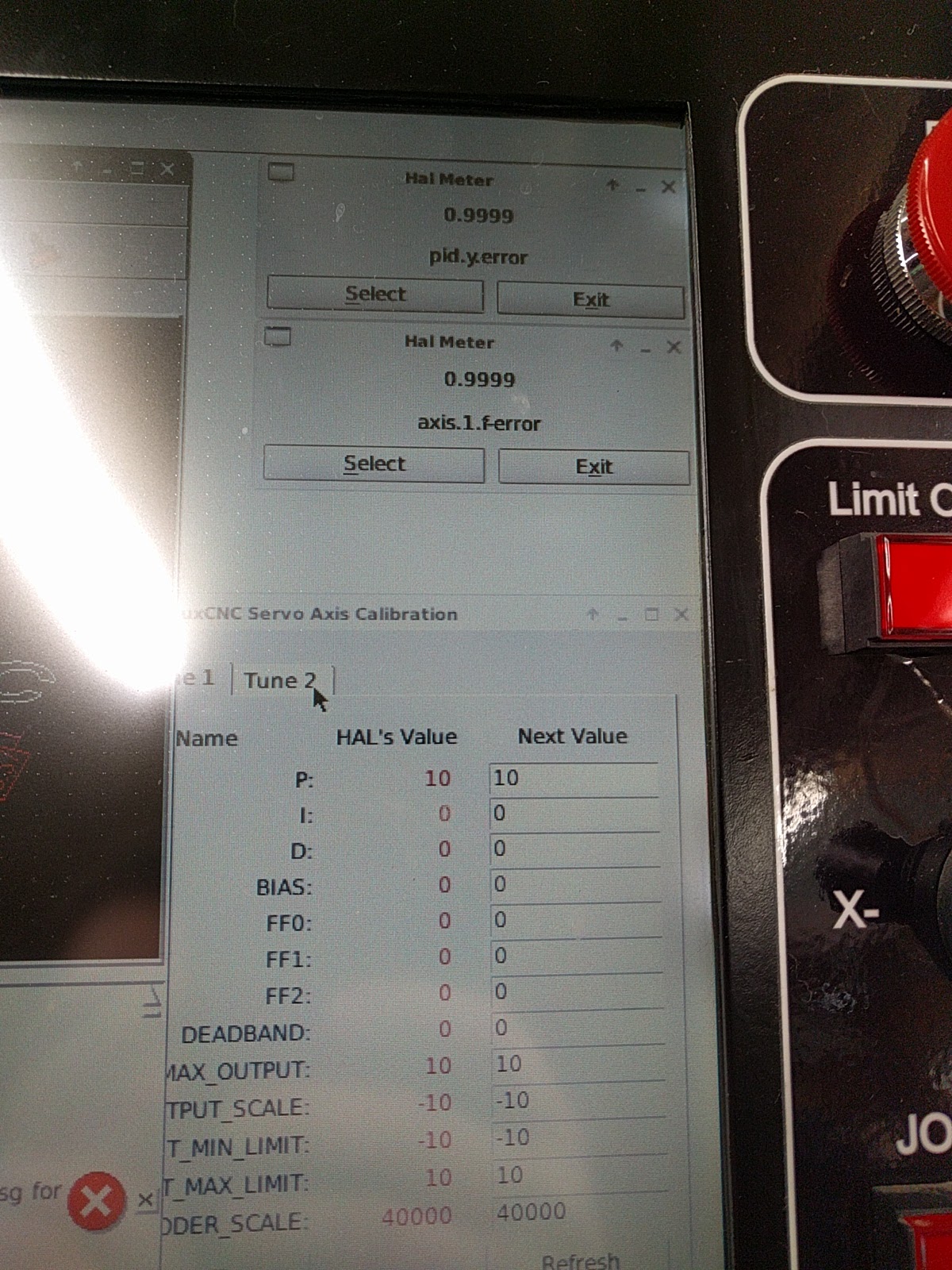
Well that definitely made a difference.
Now an f-error of 1 will yelid a 10v output.
P=10
Everything else 0.
F-error = 0.9995
Analogout1 = 9.995
Now I should be able to follow the tuning procedure mentioned before?
Now an f-error of 1 will yelid a 10v output.
P=10
Everything else 0.
F-error = 0.9995
Analogout1 = 9.995
Now I should be able to follow the tuning procedure mentioned before?
Last edit: 12 Aug 2017 15:05 by adamj12b.
Please Log in or Create an account to join the conversation.
Time to create page: 0.742 seconds