LinuxCNC S-Curve Accelerations
- ruediger123
- Offline
- Junior Member
-

Less
More
- Posts: 29
- Thank you received: 33
17 Jan 2026 20:30 #341494
by ruediger123
Replied by ruediger123 on topic LinuxCNC S-Curve Accelerations
I revised the NC program and made the number of corners and the radius parameterizable.
The following user(s) said Thank You: grandixximo, besriworld, endian
Please Log in or Create an account to join the conversation.
- grandixximo
-
 Topic Author
Topic Author
- Away
- Elite Member
-

Less
More
- Posts: 308
- Thank you received: 367
17 Jan 2026 22:09 - 17 Jan 2026 22:12 #341503
by grandixximo
Thats a dodecadon lol
I was planning to make rounded corners actually be radiuses in the gcode G2 G3, probably next week, unless you want to oblige, many thanks again Rüdiger!
Replied by grandixximo on topic LinuxCNC S-Curve Accelerations
Thats a dodecadon lol
I was planning to make rounded corners actually be radiuses in the gcode G2 G3, probably next week, unless you want to oblige, many thanks again Rüdiger!
Attachments:
Last edit: 17 Jan 2026 22:12 by grandixximo.
The following user(s) said Thank You: tommylight, besriworld, snowgoer540, endian, tiagounderground
Please Log in or Create an account to join the conversation.
- ruediger123
- Offline
- Junior Member
-
Less
More
- Posts: 29
- Thank you received: 33
18 Jan 2026 18:29 #341543
by ruediger123
Replied by ruediger123 on topic LinuxCNC S-Curve Accelerations
NC program.
square with parameterizable size and corner radius.
with G10 L2 R can be rotated around the C axis.
I don't have the knowledge to create an NC program with any number of corners and G2/G3 radiuses
square with parameterizable size and corner radius.
with G10 L2 R can be rotated around the C axis.
I don't have the knowledge to create an NC program with any number of corners and G2/G3 radiuses
The following user(s) said Thank You: grandixximo, besriworld
Please Log in or Create an account to join the conversation.
- grandixximo
-
Topic Author
- Away
- Elite Member
-
Less
More
- Posts: 308
- Thank you received: 367
21 Jan 2026 05:51 - 21 Jan 2026 06:56 #341630
by grandixximo
Replied by grandixximo on topic LinuxCNC S-Curve Accelerations
github.com/grandixximo/linuxcnc
For whomever would like to help me test the improvements, download and build, this is not in master yet, still waiting for the halcsope to get merged, I have only tested on the scope so far, will do some testing on real hardware before sending a PR to master.
Would love to have some help testing, thank you all!
still in fixing a few things, don't expect the git history to stay
For whomever would like to help me test the improvements, download and build, this is not in master yet, still waiting for the halcsope to get merged, I have only tested on the scope so far, will do some testing on real hardware before sending a PR to master.
Would love to have some help testing, thank you all!
still in fixing a few things, don't expect the git history to stay
Last edit: 21 Jan 2026 06:56 by grandixximo.
The following user(s) said Thank You: rodw, endian, Darium
Please Log in or Create an account to join the conversation.
- grandixximo
-
Topic Author
- Away
- Elite Member
-
Less
More
- Posts: 308
- Thank you received: 367
21 Jan 2026 10:09 #341637
by grandixximo
Replied by grandixximo on topic LinuxCNC S-Curve Accelerations
The arc interpolations need some work, G1 seems pretty good, will work on arcs next, maybe not ready for testing yet...
The following user(s) said Thank You: Todd Zuercher, endian, Darium
Please Log in or Create an account to join the conversation.
- Aciera
-

- Away
- Administrator
-

Less
More
- Posts: 4746
- Thank you received: 2126
21 Jan 2026 16:52 #341656
by Aciera
Replied by Aciera on topic LinuxCNC S-Curve Accelerations
@grandixximo
Note the issues related to scurve code:
github.com/LinuxCNC/linuxcnc/issues/3719
github.com/LinuxCNC/linuxcnc/issues/3720
I'm not sure if pinging you on github works.
Note the issues related to scurve code:
github.com/LinuxCNC/linuxcnc/issues/3719
github.com/LinuxCNC/linuxcnc/issues/3720
I'm not sure if pinging you on github works.
Please Log in or Create an account to join the conversation.
- grandixximo
-
Topic Author
- Away
- Elite Member
-
Less
More
- Posts: 308
- Thank you received: 367
21 Jan 2026 21:23 - 22 Jan 2026 07:26 #341668
by grandixximo
Replied by grandixximo on topic LinuxCNC S-Curve Accelerations
I get notifications, I do check on them when I am free...
Edit:
YangYang also replied, those will be fixed, but we have bigger fish to fry now, we are working on arc stopping, and some other arc blending related issues.
Edit:
YangYang also replied, those will be fixed, but we have bigger fish to fry now, we are working on arc stopping, and some other arc blending related issues.
Last edit: 22 Jan 2026 07:26 by grandixximo.
The following user(s) said Thank You: rodw, zmrdko
Please Log in or Create an account to join the conversation.
- yrsiddhapura
- Offline
- Premium Member
-

Less
More
- Posts: 134
- Thank you received: 5
22 Jan 2026 05:10 #341678
by yrsiddhapura
Replied by yrsiddhapura on topic LinuxCNC S-Curve Accelerations
Does it compatible with mesa based setup ??
Please Log in or Create an account to join the conversation.
- grandixximo
-
Topic Author
- Away
- Elite Member
-
Less
More
- Posts: 308
- Thank you received: 367
22 Jan 2026 07:18 - 22 Jan 2026 07:21 #341680
by grandixximo
Replied by grandixximo on topic LinuxCNC S-Curve Accelerations
it is compatible with mesa default setup, but you need add the jerk parameters in the ini file, look at the axis_mm_scurve.ini file
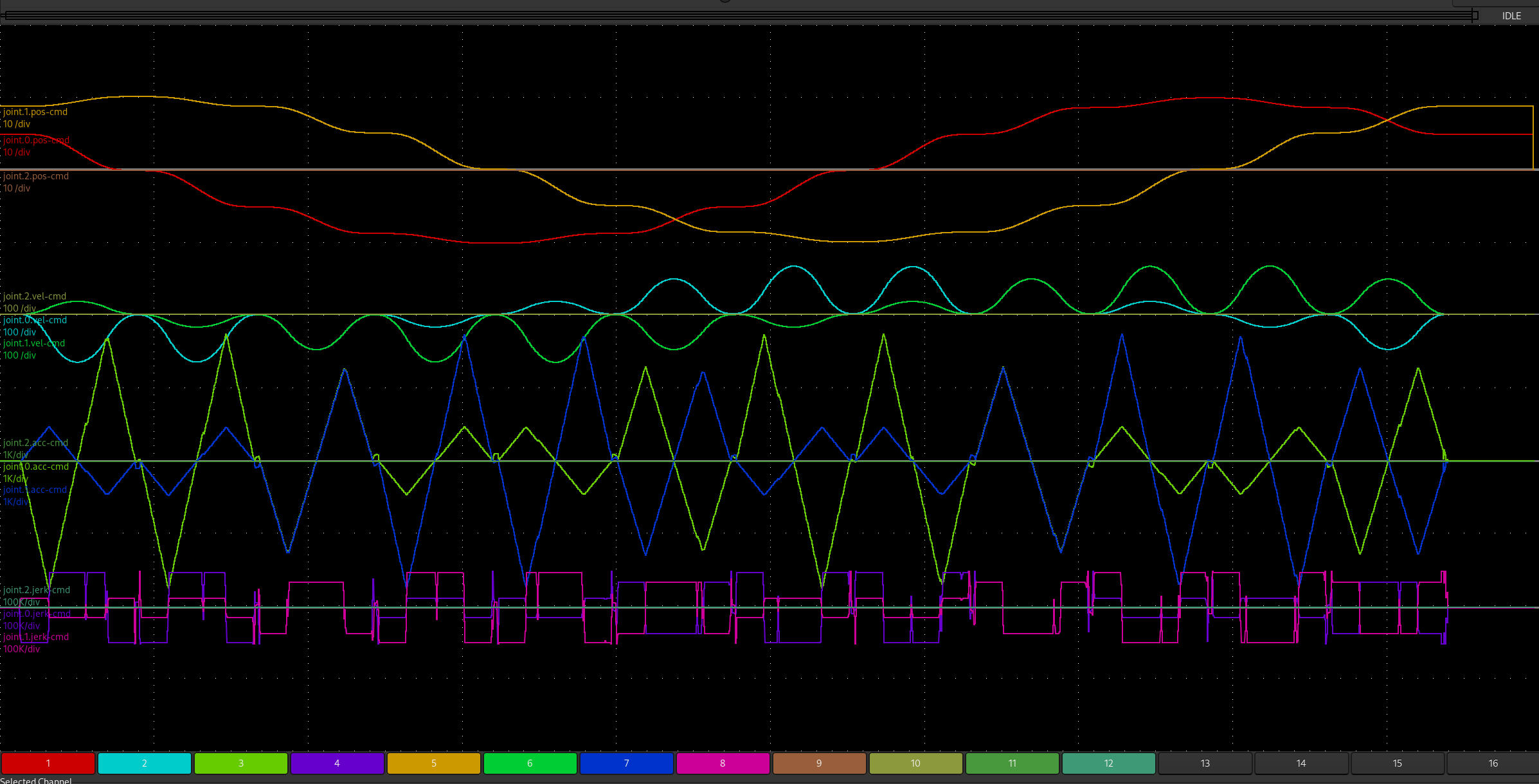
I wanted some feedback from the community about s-curve, there a few considerations to make, not just jerk spikes
I think there are some choices to make, when trying to respect jerk limits, we can:
1 - Slow down at curvature changes: reduce Vel so the centripetal acceleration change is manageable. (this defeats high-speed machining)
2 - Modify the geometry: insert transition curves (clothoids, Bezier, splines) that have gradually changing curvature. This eliminates the discontinuity but changes the path. (when G64 Px is too small you will see jerk spikes)
3 - Accept the spike: the programmed path has a curvature discontinuity, so the motion will too.
There is no fourth option. You cannot maintain velocity, follow the exact programmed path, AND have smooth jerk. we need pick two.
I wanted some feedback from the community about s-curve, there a few considerations to make, not just jerk spikes
I think there are some choices to make, when trying to respect jerk limits, we can:
1 - Slow down at curvature changes: reduce Vel so the centripetal acceleration change is manageable. (this defeats high-speed machining)
2 - Modify the geometry: insert transition curves (clothoids, Bezier, splines) that have gradually changing curvature. This eliminates the discontinuity but changes the path. (when G64 Px is too small you will see jerk spikes)
3 - Accept the spike: the programmed path has a curvature discontinuity, so the motion will too.
There is no fourth option. You cannot maintain velocity, follow the exact programmed path, AND have smooth jerk. we need pick two.
Last edit: 22 Jan 2026 07:21 by grandixximo.
The following user(s) said Thank You: rodw, besriworld, zmrdko
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-

Less
More
- Posts: 4756
- Thank you received: 1459
22 Jan 2026 12:12 #341694
by Todd Zuercher
Replied by Todd Zuercher on topic LinuxCNC S-Curve Accelerations
My personal opinion is to default to #1. But as G64P tolerance increases allow more path tolerance so that velocity deviation can decrees.
The following user(s) said Thank You: tiagounderground
Please Log in or Create an account to join the conversation.
Time to create page: 2.072 seconds