ROS LinuxCNC Link
- Grotius
-

- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
23 May 2021 17:30 #209924
by Grotius
Replied by Grotius on topic ROS LinuxCNC Link
Hi Arciera,
github.com/grotius-cnc/linuxcnc
I think it is oke now. I see multiple hal files appearing into the source.
github.com/grotius-cnc/linuxcnc
I think it is oke now. I see multiple hal files appearing into the source.
Attachments:
The following user(s) said Thank You: Aciera, DPFlex
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
27 May 2021 21:28 - 27 May 2021 21:30 #210467
by Grotius
Replied by Grotius on topic ROS LinuxCNC Link
Hi Arciera,
Did you had a look at the github code, if it compiles?
If not, i have to look at it.
At the moment finishing the mdi commands. Have to do the cartesian mdi.
What's left to do is moving in tool direction, Arciera's request.")
I am really impressed by the realtime performance. Later on next week i will make some video's to show it.
Now also showing when joint limit is reached. Then the button color become's red. Implementing this failsafe logic
into the program is quite a lot of work.
For the controls i now have working :
1. joint move, j0,j1,j2,j3,j4,j5 with max deg a second.
2. cart move x,y,z with max lineair speed and acc-dcc in s-curve
3. tcp rotation in euler x,y,z with max deg a second.
4. joint limits
5. mdi joint command. The joint's will end at the same time.
6. live hal mode - demo mode
7. tools
8. realtime position stream in base-thread.
9. testing on ethercat hardware
When the controls are done and everything works how it should. I will integrate the pendant style again.
I got more and more the feeling this is a very good solution. It's just like streaming a netflix movie.
Most of the readers know we have managed to implement the dxfrw library this week with another program.
This break's open a way that we can load 3d dxf files into this program and for example generate a 3d cut path for the robot.
So we can go quite advanched soon !
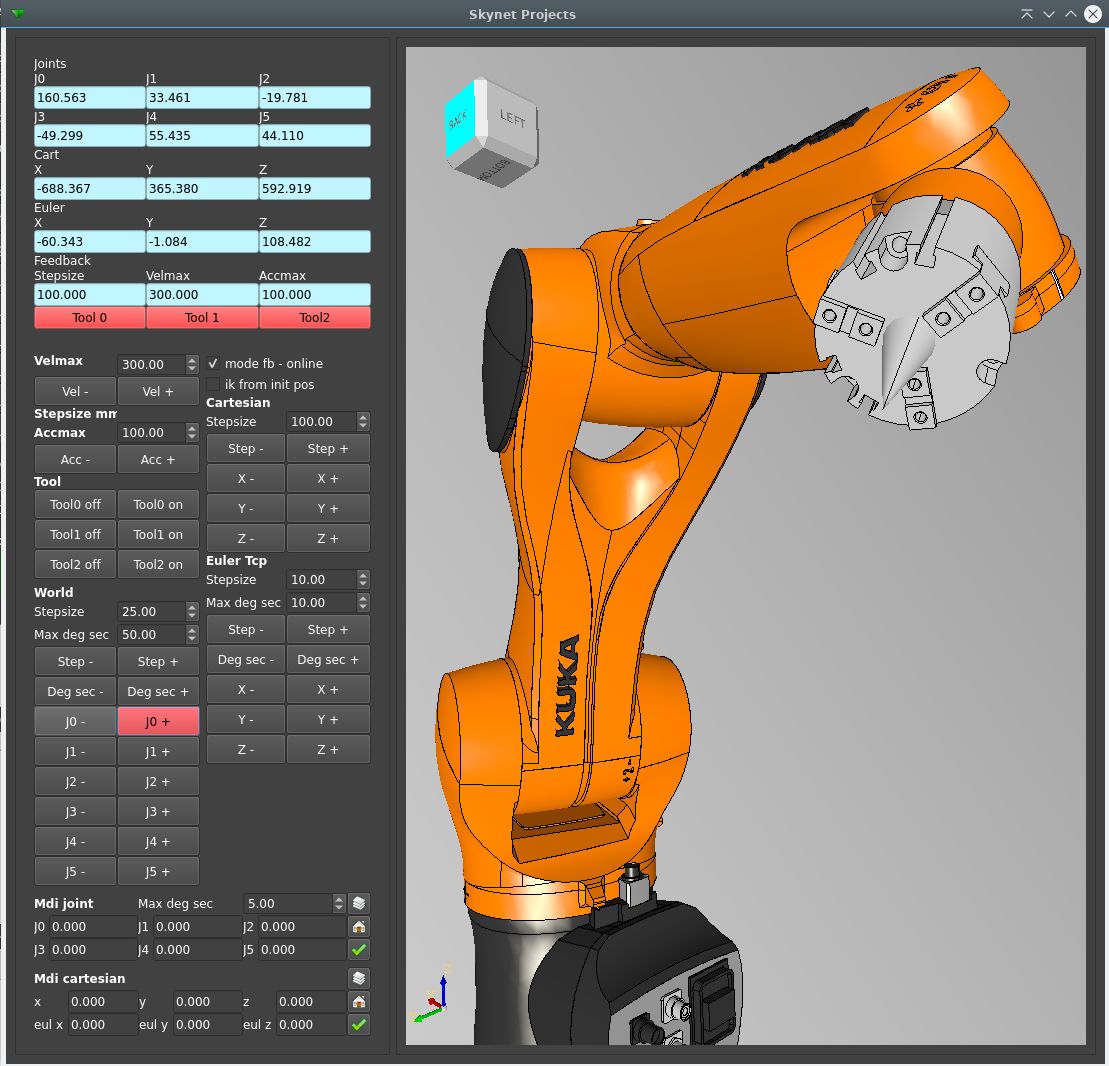
Did you had a look at the github code, if it compiles?
If not, i have to look at it.
At the moment finishing the mdi commands. Have to do the cartesian mdi.
What's left to do is moving in tool direction, Arciera's request.
I am really impressed by the realtime performance. Later on next week i will make some video's to show it.
Now also showing when joint limit is reached. Then the button color become's red. Implementing this failsafe logic
into the program is quite a lot of work.
For the controls i now have working :
1. joint move, j0,j1,j2,j3,j4,j5 with max deg a second.
2. cart move x,y,z with max lineair speed and acc-dcc in s-curve
3. tcp rotation in euler x,y,z with max deg a second.
4. joint limits
5. mdi joint command. The joint's will end at the same time.
6. live hal mode - demo mode
7. tools
8. realtime position stream in base-thread.
9. testing on ethercat hardware
When the controls are done and everything works how it should. I will integrate the pendant style again.
I got more and more the feeling this is a very good solution. It's just like streaming a netflix movie.
Most of the readers know we have managed to implement the dxfrw library this week with another program.
This break's open a way that we can load 3d dxf files into this program and for example generate a 3d cut path for the robot.
So we can go quite advanched soon !
Attachments:
Last edit: 27 May 2021 21:30 by Grotius.
The following user(s) said Thank You: tommylight, robins, Aciera
Please Log in or Create an account to join the conversation.
- Aciera
-

- Away
- Administrator
-

Less
More
- Posts: 4716
- Thank you received: 2112
28 May 2021 07:22 #210493
by Aciera
I'm sorry, I have somehow missed your post. I'll try to compile again and report back.
Thanks
Replied by Aciera on topic ROS LinuxCNC Link
Did you had a look at the github code, if it compiles?
I'm sorry, I have somehow missed your post. I'll try to compile again and report back.
Thanks
Please Log in or Create an account to join the conversation.
- Aciera
-
- Away
- Administrator
-
Less
More
- Posts: 4716
- Thank you received: 2112
28 May 2021 07:49 #210495
by Aciera
Replied by Aciera on topic ROS LinuxCNC Link
Ok, it has compiled successfully.
How do I now start your application?
How do I now start your application?
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
28 May 2021 08:49 #210499
by Grotius
Replied by Grotius on topic ROS LinuxCNC Link
Hi Arciera,
I need a few day's more to code. When it's ready to try will give you the download link.
I need a few day's more to code. When it's ready to try will give you the download link.
The following user(s) said Thank You: Aciera
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
05 Jun 2021 15:00 - 05 Jun 2021 15:01 #211219
by Grotius
Replied by Grotius on topic ROS LinuxCNC Link
Hi,
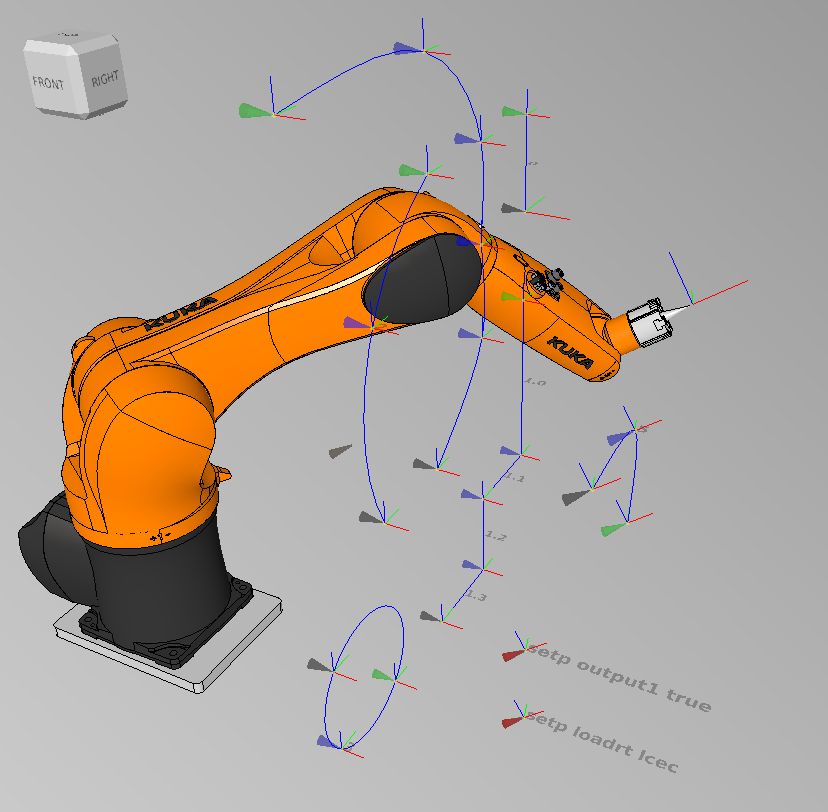
I made little progress. Added some technical details. It can look a bit messy, but for now it's ok.
The controls are fully functional. Now focussing on how to teach and how to store and edit this data in opencascade.
1.Moving the robot in tool direction is done! This works very nice. Also mdi commands are working.
2.When for example teaching a line, it will attach the toolposition's (euler angles) at the begin- and the end of the line to teach.
When clicking on the teached line, you can simple delete it (and it's childs) by one command. This is quite nice.
- The green cone is startpoint.
- The red cone is a halcommand including position & euler angles.
- The black cone is the endpoint.
3. Todo is getting the possibility to edit existing line point's to enable live preview. How the editing works, i have to ask at the opencascade help center. So far i haven't seen a solution how to do this.
So far so good.
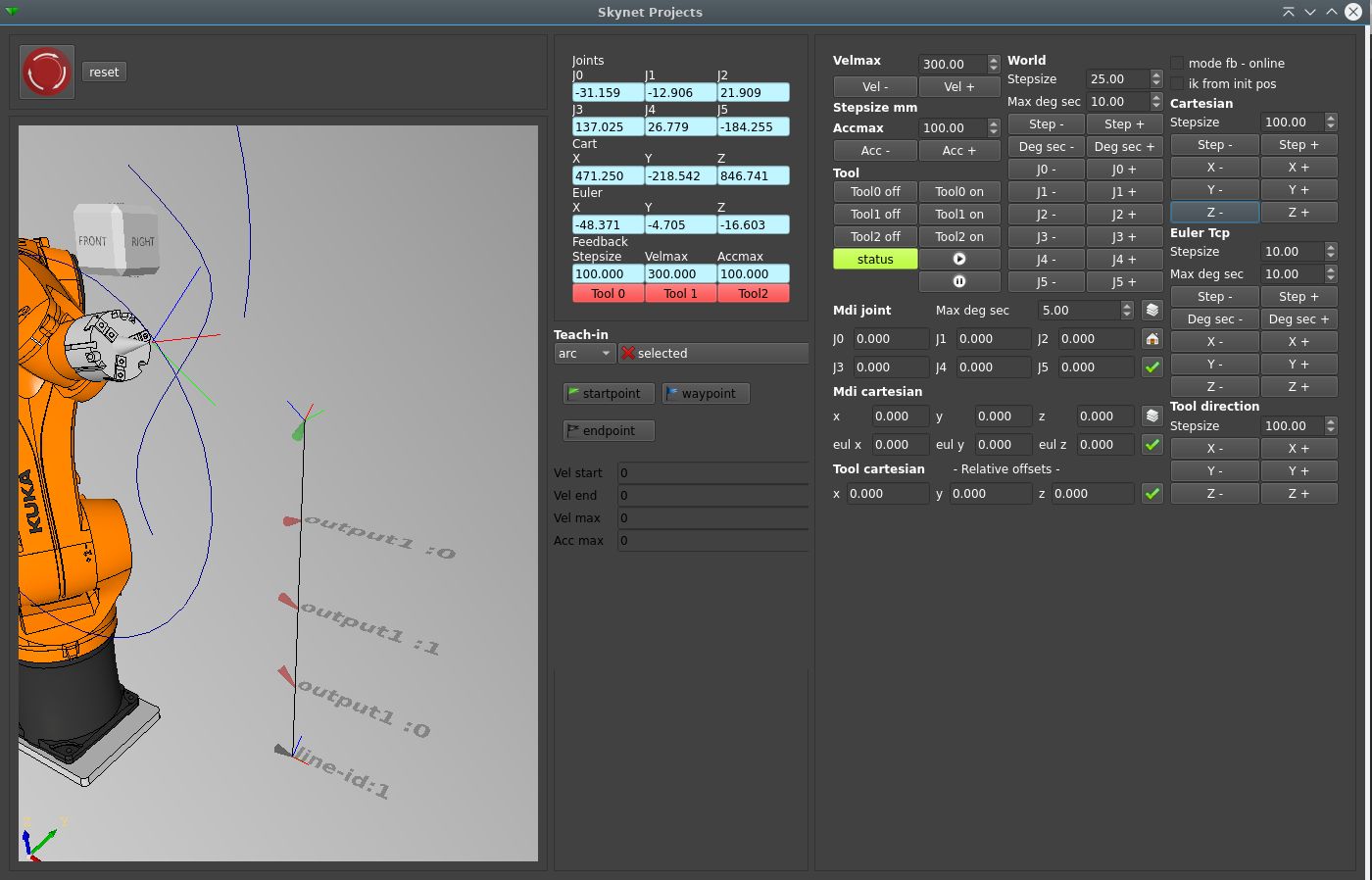
I made little progress. Added some technical details. It can look a bit messy, but for now it's ok.
The controls are fully functional. Now focussing on how to teach and how to store and edit this data in opencascade.
1.Moving the robot in tool direction is done! This works very nice. Also mdi commands are working.
2.When for example teaching a line, it will attach the toolposition's (euler angles) at the begin- and the end of the line to teach.
When clicking on the teached line, you can simple delete it (and it's childs) by one command. This is quite nice.
- The green cone is startpoint.
- The red cone is a halcommand including position & euler angles.
- The black cone is the endpoint.
3. Todo is getting the possibility to edit existing line point's to enable live preview. How the editing works, i have to ask at the opencascade help center. So far i haven't seen a solution how to do this.
So far so good.
Attachments:
Last edit: 05 Jun 2021 15:01 by Grotius.
The following user(s) said Thank You: Bari, tommylight, robins, Aciera, DPFlex
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
08 Jun 2021 14:51 #211513
by Grotius
Replied by Grotius on topic ROS LinuxCNC Link
Hi,
A tiny project update.
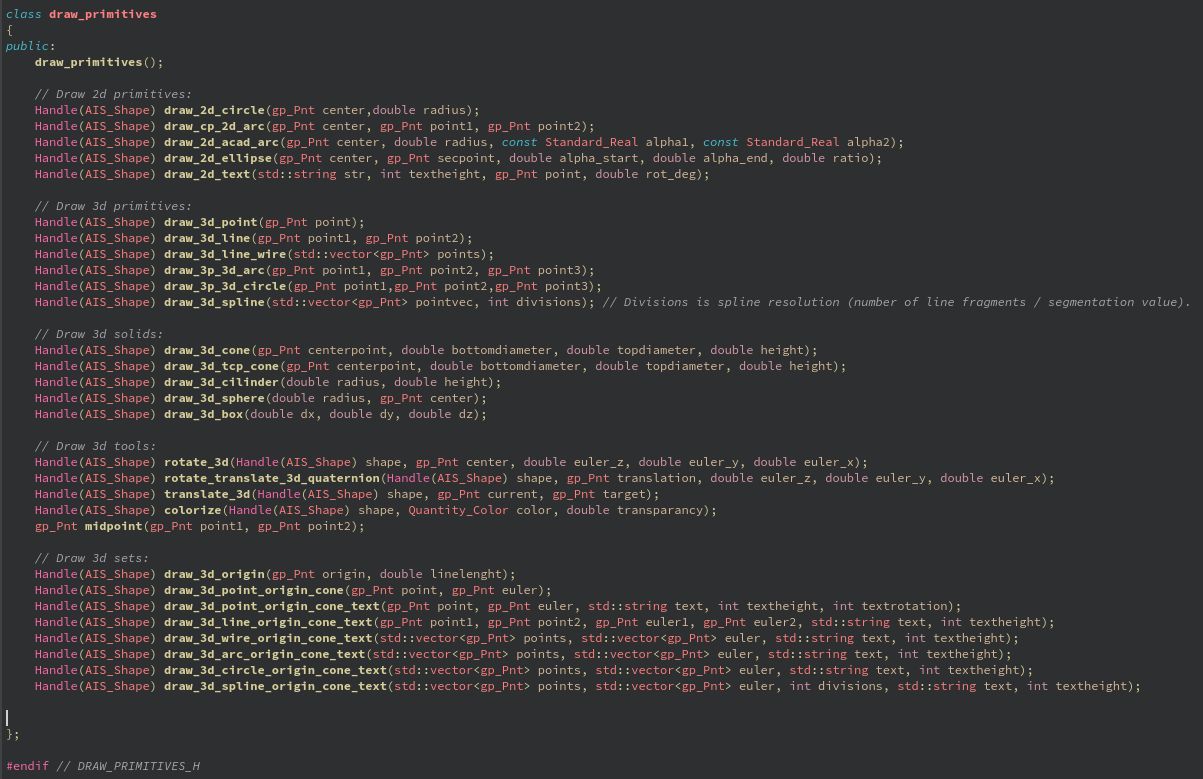
The lines, linestrips, arc's, circle's, splines, tool-io are now showing the euler angles. Oke this is nice.
I re-organized the opencascade function's.
Next i am planning to integrate the dxfrw library. Then we can load some dxf file's into the project and maybe
then we get some idea's how to program a dxf.
So far so good!
A tiny project update.
The lines, linestrips, arc's, circle's, splines, tool-io are now showing the euler angles. Oke this is nice.
I re-organized the opencascade function's.
Next i am planning to integrate the dxfrw library. Then we can load some dxf file's into the project and maybe
then we get some idea's how to program a dxf.
So far so good!
Attachments:
The following user(s) said Thank You: Bari, tommylight, robins, Aciera
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
09 Jun 2021 22:14 #211643
by Grotius
Replied by Grotius on topic ROS LinuxCNC Link
Hi,
Today i integrated the dxfrw library.
Now is the question how to program this dxf preview if we do a cut or glue operation.
If we load a 3d stepfile model, it would be nice if we can program this the same way.
We could perform a contour recognize algoritme with standard euler angles as output.
We could set the euler angles in tangential direction. This can be used for a cut angle correction when using plasma.
Maybe think some more before start coding.
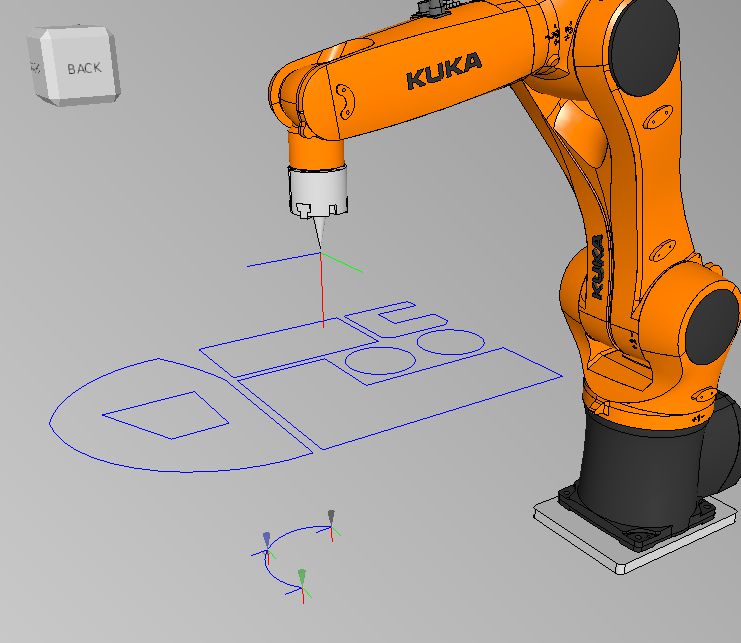
Today i integrated the dxfrw library.
Now is the question how to program this dxf preview if we do a cut or glue operation.
If we load a 3d stepfile model, it would be nice if we can program this the same way.
We could perform a contour recognize algoritme with standard euler angles as output.
We could set the euler angles in tangential direction. This can be used for a cut angle correction when using plasma.
Maybe think some more before start coding.
Attachments:
The following user(s) said Thank You: Bari, tommylight, robins
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
12 Jun 2021 21:25 - 12 Jun 2021 21:29 #211895
by Grotius
Replied by Grotius on topic ROS LinuxCNC Link
Hi
A tiny update. It can now do a tiny program. I made a tiny video to show what is going on.
user-images.githubusercontent.com/448801...7d0-e38b01950fe4.mp4
If i turn the screencast off, the path following is perfect. At the end of line 4 you see it has difficulties. My pc is quite an oldy.
Motor's are connected. For info, this is realtime 1ms with scurve motion profile.
A tiny update. It can now do a tiny program. I made a tiny video to show what is going on.
user-images.githubusercontent.com/448801...7d0-e38b01950fe4.mp4
If i turn the screencast off, the path following is perfect. At the end of line 4 you see it has difficulties. My pc is quite an oldy.
Motor's are connected. For info, this is realtime 1ms with scurve motion profile.
Last edit: 12 Jun 2021 21:29 by Grotius.
The following user(s) said Thank You: Bari, tommylight, Aciera
Please Log in or Create an account to join the conversation.
- Grotius
-
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
13 Jun 2021 15:19 #211944
by Grotius
Replied by Grotius on topic ROS LinuxCNC Link
Hi,
Today i made a video sample where robot does euler angles.
user-images.githubusercontent.com/448801...8d6-e6319185ce63.mp4
user-images.githubusercontent.com/448801...f68-16cc9dcdd676.mp4
So far i am quite satisfied. At some points the c++ code has to improved a bit. It currently calculates the kinematics from init position.
Today i made a video sample where robot does euler angles.
user-images.githubusercontent.com/448801...8d6-e6319185ce63.mp4
user-images.githubusercontent.com/448801...f68-16cc9dcdd676.mp4
So far i am quite satisfied. At some points the c++ code has to improved a bit. It currently calculates the kinematics from init position.
The following user(s) said Thank You: Bari, tommylight, robins, Aciera, Doogie
Please Log in or Create an account to join the conversation.
Time to create page: 0.387 seconds