hal-core
- Grotius
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
02 Nov 2021 19:09 #225024
by Grotius
Replied by Grotius on topic hal-core
Hi Dave,
I just replaced the stepfiles of the fanuc. I uploaded them accidentaly to the mitsubishi folder.
So if you see a wrong robot, just replace the stepfiles.
I just replaced the stepfiles of the fanuc. I uploaded them accidentaly to the mitsubishi folder.
So if you see a wrong robot, just replace the stepfiles.
Please Log in or Create an account to join the conversation.
- Dave3891
- Offline
- Senior Member
-

Less
More
- Posts: 56
- Thank you received: 7
02 Nov 2021 19:28 #225025
by Dave3891
Replied by Dave3891 on topic hal-core
Hi Grotius,
I installed the hal-core with the new install_guide file, so far so good.
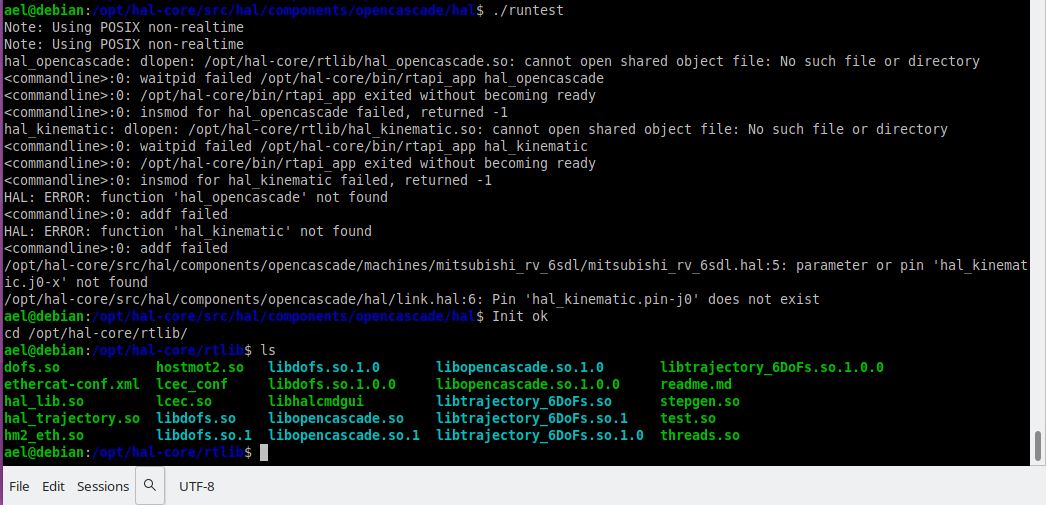
But when I go in to the hal-core/src/hal/components/opencascade/hal and run the ./runtest
I get errors about hal_opencascade.so not found.
Do I need to install another module?
Here is what is in my hal-core/rtlib directory
I installed the hal-core with the new install_guide file, so far so good.
But when I go in to the hal-core/src/hal/components/opencascade/hal and run the ./runtest
I get errors about hal_opencascade.so not found.
Do I need to install another module?
Here is what is in my hal-core/rtlib directory
Attachments:
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
02 Nov 2021 19:38 - 02 Nov 2021 19:43 #225026
by Grotius
Replied by Grotius on topic hal-core
Hi,
I see hal_opencascade is not in your /rtlib. So it is not build somehow.
What does this output tells you? : $ /opt/hal-core/src/hal/components/opencascade/hal/./make
At my place it works. But i will reupload the /opencascade and /kinematics dir's to github. This will take a few minutes.
I will tell you here when its ready. And then i will do a fresh install and runtest to check if its oke.
I see hal_opencascade is not in your /rtlib. So it is not build somehow.
What does this output tells you? : $ /opt/hal-core/src/hal/components/opencascade/hal/./make
At my place it works. But i will reupload the /opencascade and /kinematics dir's to github. This will take a few minutes.
I will tell you here when its ready. And then i will do a fresh install and runtest to check if its oke.
Last edit: 02 Nov 2021 19:43 by Grotius.
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
02 Nov 2021 19:55 #225028
by Grotius
Replied by Grotius on topic hal-core
Hi Dave,
The dirs are reuploaded.
The dirs are reuploaded.
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
02 Nov 2021 20:10 - 02 Nov 2021 20:15 #225029
by Grotius
Last edit: 02 Nov 2021 20:15 by Grotius.
Please Log in or Create an account to join the conversation.
- Dave3891
- Offline
- Senior Member
-
Less
More
- Posts: 56
- Thank you received: 7
02 Nov 2021 20:53 #225035
by Dave3891
Replied by Dave3891 on topic hal-core
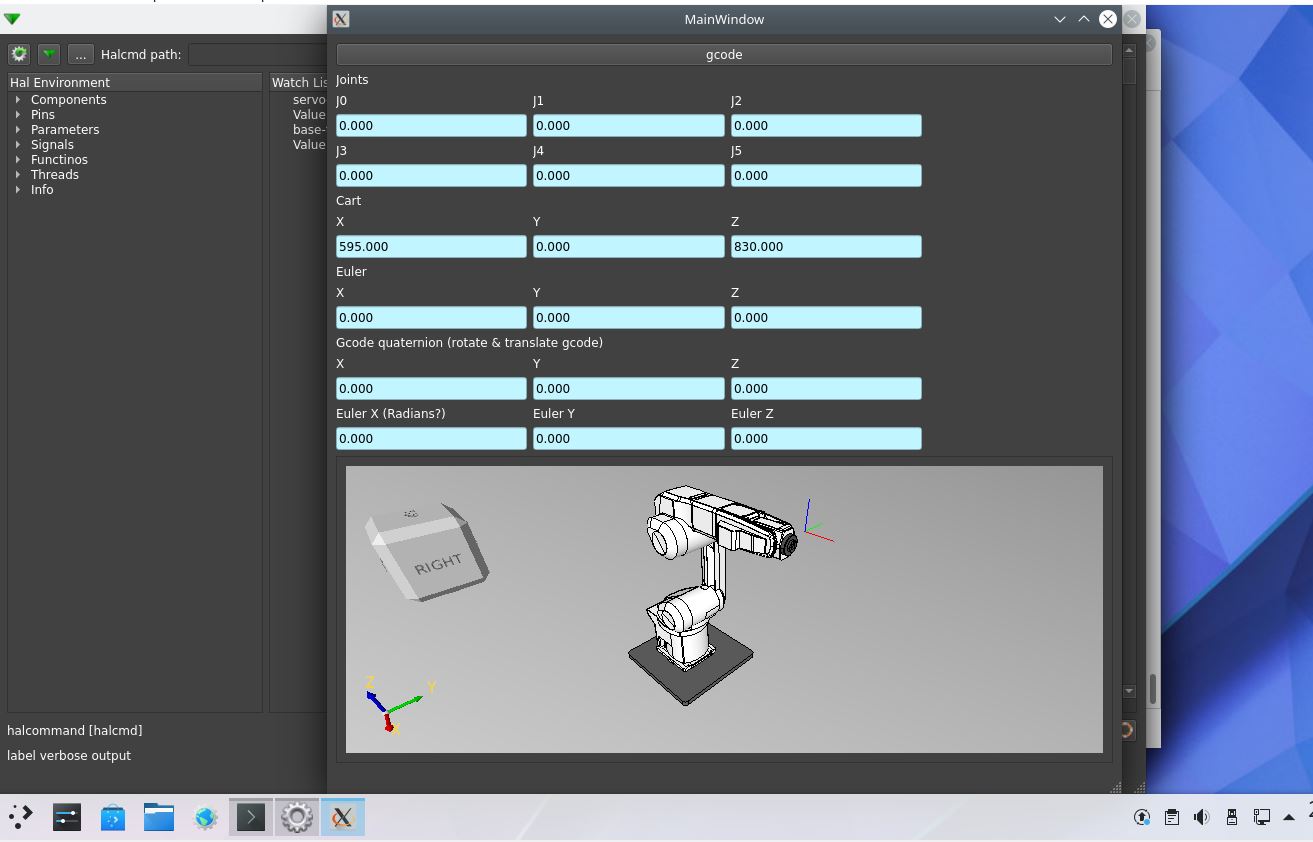
Deleted the old directories and redid the install_guide and everything worked!
Attachments:
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
02 Nov 2021 21:11 #225039
by Grotius
Replied by Grotius on topic hal-core
Hi Dave,
Thank you for letting me know it worked !
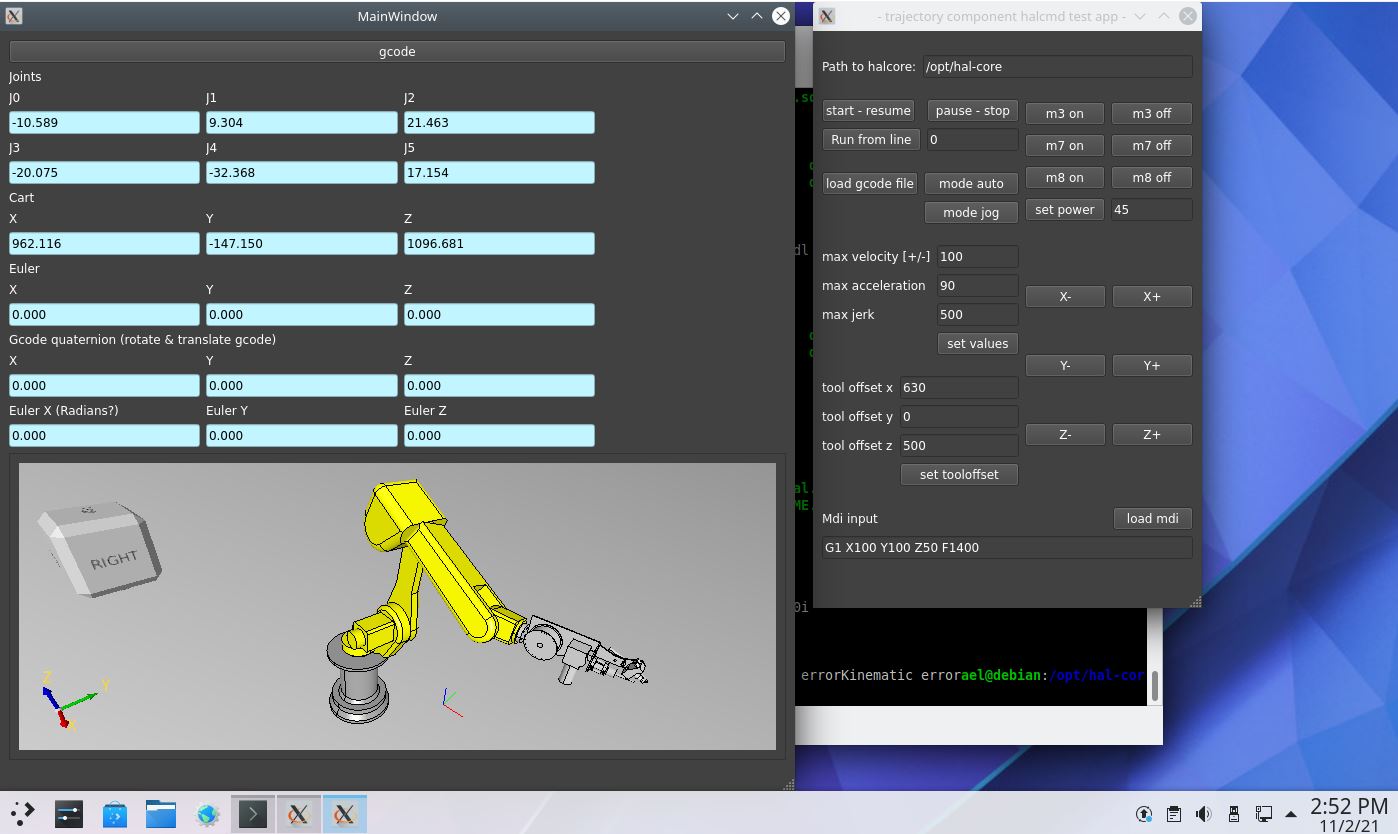
1. You could try to add some hal pins to mesa harware in the the ./runtest file to move your robot a little bit with jog commands only.
Be carefull.
2. Check your stepfile drawings if positions of joints are perfect, try to check the exact tcp tool position.
I am working on the code of hal_opencascade.c and hal_kinematics.c to purge the halcompile coding style into pure c.
Will work on loading a gcode and let it move by a quaternion. Then you can position your heat exchanger by
hal parameter pins in 3d.
Thank you for letting me know it worked !
1. You could try to add some hal pins to mesa harware in the the ./runtest file to move your robot a little bit with jog commands only.
Be carefull.
2. Check your stepfile drawings if positions of joints are perfect, try to check the exact tcp tool position.
I am working on the code of hal_opencascade.c and hal_kinematics.c to purge the halcompile coding style into pure c.
Will work on loading a gcode and let it move by a quaternion. Then you can position your heat exchanger by
hal parameter pins in 3d.
Please Log in or Create an account to join the conversation.
- Dave3891
- Offline
- Senior Member
-
Less
More
- Posts: 56
- Thank you received: 7
02 Nov 2021 22:08 #225049
by Dave3891
Replied by Dave3891 on topic hal-core
Hi Grotius,
Not sure if this is because it is running in a virtual machine or not, but I noticed when jogging that when I switch directions it will still move in the opposite direction almost like it has to finish a path plan? Here is a video of what it happening
Not sure if this is because it is running in a virtual machine or not, but I noticed when jogging that when I switch directions it will still move in the opposite direction almost like it has to finish a path plan? Here is a video of what it happening
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
02 Nov 2021 23:40 - 02 Nov 2021 23:44 #225052
by Grotius
Replied by Grotius on topic hal-core
Hi Dave,
I will have to look in the code. I think we have to reset a value somewhere.
I will have to look in the code. I think we have to reset a value somewhere.
Last edit: 02 Nov 2021 23:44 by Grotius.
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
04 Nov 2021 02:39 #225190
by Grotius
Replied by Grotius on topic hal-core
Latest archive : github.com/grotius-cnc/hal-core/releases/tag/1.4
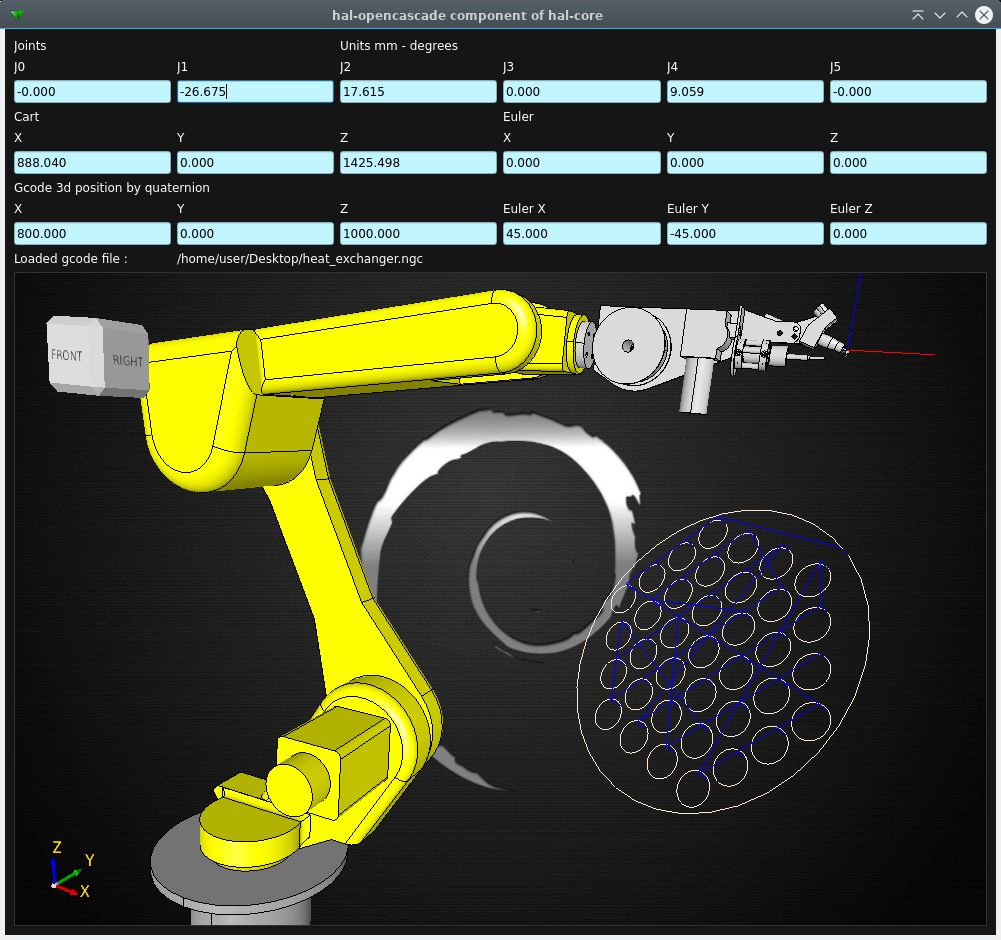
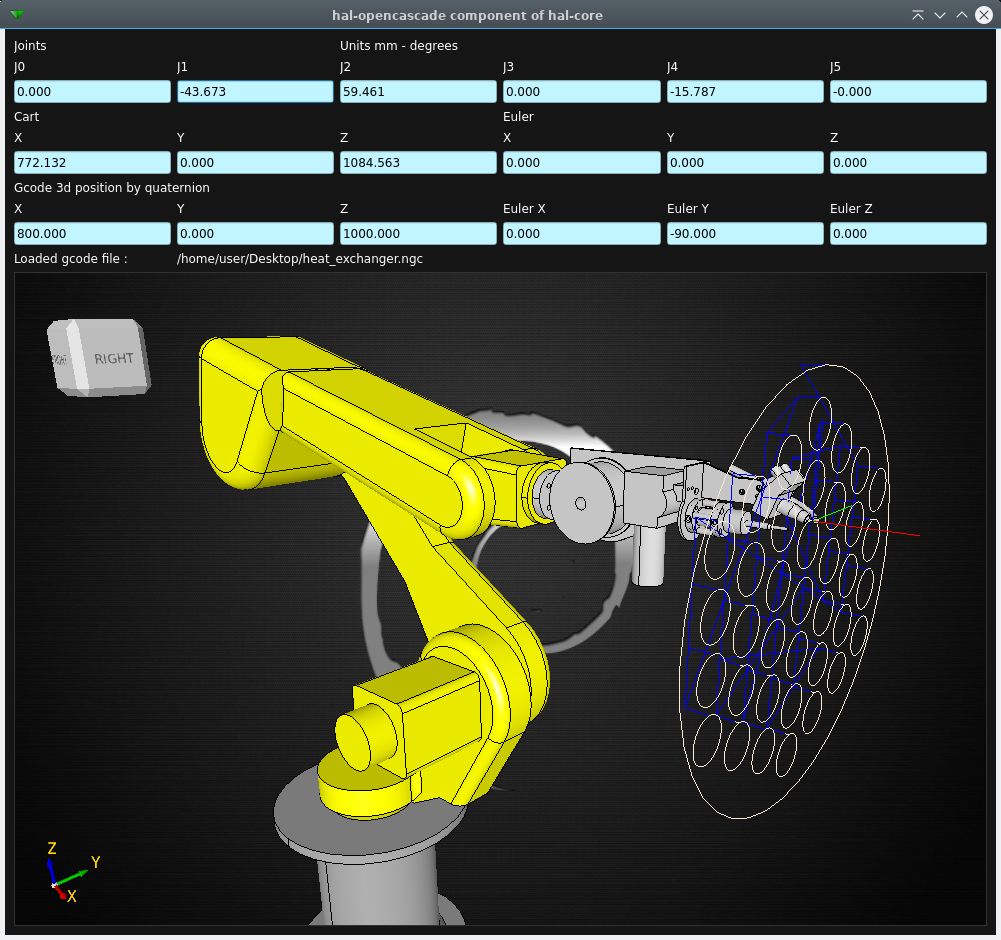
At the moment the gcode can be rotated 3d by setting hal parameters.
tool tcp has a 3d axis cross, the result (control status) of the machinemodel.hal file.
background picture can be changed by user. Just rename your picture to : background.jpg
all communication is done by hal, even the file names are done by hal-port.
So far so good.
Tomorrow i will focus on the robot jog buttons. They are done by the hal_trajectory component.
At the moment we can jog in cart xyz.
1. To code : move joints 0-5 degrees, move in tooldirection xyz, rotate around tool tcp euler xyz.
After that i can focus at the trajectory planner itself.
Ok. so far so good !
At the moment the gcode can be rotated 3d by setting hal parameters.
tool tcp has a 3d axis cross, the result (control status) of the machinemodel.hal file.
background picture can be changed by user. Just rename your picture to : background.jpg
all communication is done by hal, even the file names are done by hal-port.
So far so good.
Tomorrow i will focus on the robot jog buttons. They are done by the hal_trajectory component.
At the moment we can jog in cart xyz.
1. To code : move joints 0-5 degrees, move in tooldirection xyz, rotate around tool tcp euler xyz.
After that i can focus at the trajectory planner itself.
Ok. so far so good !
Attachments:
Please Log in or Create an account to join the conversation.
Time to create page: 0.534 seconds