hal-core
- Grotius
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
04 Nov 2021 02:49 - 04 Nov 2021 02:51 #225192
by Grotius
Replied by Grotius on topic hal-core
Dave,
If you could try to add the mesa hardware and test some jogging, that would be awesome !
Maybe give the exact dxf of the heat exchanger. And a 3d stepfile of the head exchanger.
Then in the program we can add the dxf on top of the 3d model face.
In this way, we can do a nice simulation soon.
During the welding simulation, i can add inox to the weld path. Opencascade can do boolean operations. I have private
github for that.
If you could try to add the mesa hardware and test some jogging, that would be awesome !
Maybe give the exact dxf of the heat exchanger. And a 3d stepfile of the head exchanger.
Then in the program we can add the dxf on top of the 3d model face.
In this way, we can do a nice simulation soon.
During the welding simulation, i can add inox to the weld path. Opencascade can do boolean operations. I have private
github for that.
Last edit: 04 Nov 2021 02:51 by Grotius.
Please Log in or Create an account to join the conversation.
- Dave3891
- Offline
- Senior Member
-

Less
More
- Posts: 56
- Thank you received: 7
04 Nov 2021 03:37 #225194
by Dave3891
Replied by Dave3891 on topic hal-core
Grotius, that is looking really good!
I have some different mesa hardware that I need to wire in to the robot before I can test it. The current hardware is the 7c80 with a raspberry pi, but I had boot up power problems with that so I switched to a normal PC and an ethernet card. This will have more rendering/processing power as well.
I can bench test the boards before I wire them in the machine to simulate the motion though to keep the project on track.
So the way I currently have the welding head setup is:
- The welding amperage is set on the welding machine
- Wire feeder is a DC motor connected to a drive to the mesa card and set with HAL
- Robot moves to the estimated hole location
- A 3D probe is used to center the welding head to the tube
- Welding feed is with the 6th axis rotation
- TIG tungsten to weld puddle distance is adjusted automatically by monitoring the arc voltage with a mesa ADC and adjusting the X position to maintain the setting
- There is also a preheat/postheat stage that strikes the arc and waits a set amount of time before the wire will start feeding in the weld and the rotation starts.
Hope that makes sense
I also have one of these wireless pendants for positioning the robot and I was thinking I might be able to use it to navigate the computer GUI instead of using a mouse/keyboard?
linuxcnc.org/docs/2.8/html/man/man1/xhc-whb04b-6.1.html
I have some different mesa hardware that I need to wire in to the robot before I can test it. The current hardware is the 7c80 with a raspberry pi, but I had boot up power problems with that so I switched to a normal PC and an ethernet card. This will have more rendering/processing power as well.
I can bench test the boards before I wire them in the machine to simulate the motion though to keep the project on track.
So the way I currently have the welding head setup is:
- The welding amperage is set on the welding machine
- Wire feeder is a DC motor connected to a drive to the mesa card and set with HAL
- Robot moves to the estimated hole location
- A 3D probe is used to center the welding head to the tube
- Welding feed is with the 6th axis rotation
- TIG tungsten to weld puddle distance is adjusted automatically by monitoring the arc voltage with a mesa ADC and adjusting the X position to maintain the setting
- There is also a preheat/postheat stage that strikes the arc and waits a set amount of time before the wire will start feeding in the weld and the rotation starts.
Hope that makes sense
I also have one of these wireless pendants for positioning the robot and I was thinking I might be able to use it to navigate the computer GUI instead of using a mouse/keyboard?
linuxcnc.org/docs/2.8/html/man/man1/xhc-whb04b-6.1.html
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
04 Nov 2021 04:16 #225197
by Grotius
Replied by Grotius on topic hal-core
Hi Dave,
The pendant is ok. It can be connected to hal.
From now on if you want to get the latest code, just download the latest release. It's precompiled.
The tig torch is not in line with the robot flange. If you want to move in tig torch direction, we have to add a extra 7th "fake" axis.
Then you could also do a torch height control from that perspective. Torch height control in heat-exchanger x-direction is not
a optimal solution.
Grotius, that is looking really good!
So far i am satisfied with the result.
The pendant is ok. It can be connected to hal.
From now on if you want to get the latest code, just download the latest release. It's precompiled.
The tig torch is not in line with the robot flange. If you want to move in tig torch direction, we have to add a extra 7th "fake" axis.
Then you could also do a torch height control from that perspective. Torch height control in heat-exchanger x-direction is not
a optimal solution.
Grotius, that is looking really good!
So far i am satisfied with the result.
Please Log in or Create an account to join the conversation.
- Dave3891
- Offline
- Senior Member
-
Less
More
- Posts: 56
- Thank you received: 7
04 Nov 2021 15:59 #225240
by Dave3891
Replied by Dave3891 on topic hal-core
Hi Grotius,
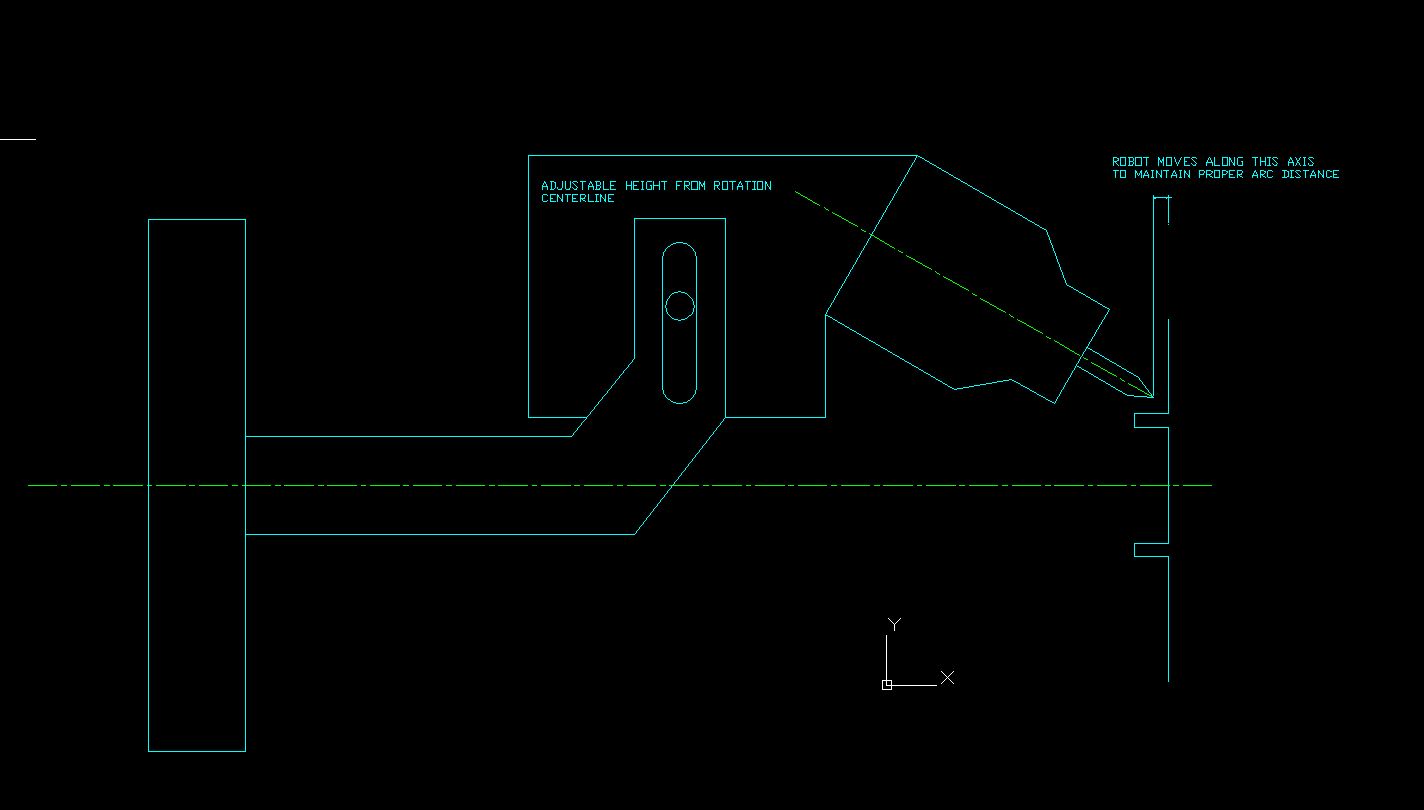
The distance from the rotation centerline to the weld is adjusted and locked manually within the welding head so it only need to spin on its centerline and then maintain the correct arc length by moving forward or reverse (X axis I think?)
Here is a quick sketch of what I mean
The distance from the rotation centerline to the weld is adjusted and locked manually within the welding head so it only need to spin on its centerline and then maintain the correct arc length by moving forward or reverse (X axis I think?)
Here is a quick sketch of what I mean
Attachments:
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
05 Nov 2021 00:32 #225315
by Grotius
Replied by Grotius on topic hal-core
Hi Dave,
That's ok. Moving in x.
Jogging is solved for cart xyz.
I want to review (improve) a few files related to hal-core.
Will try to setup a more modular machine data input that suits robots, gantry's etc.
That's ok. Moving in x.
Jogging is solved for cart xyz.
I want to review (improve) a few files related to hal-core.
Will try to setup a more modular machine data input that suits robots, gantry's etc.
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
09 Nov 2021 02:50 #225758
by Grotius
Replied by Grotius on topic hal-core
Hi,
Just a hal-core update.
I started coding from the bottom trough hal, kinematics and opencascade.
A few day's are past.
What i learned is to use dynamic memory allocating in a c coded hal component.
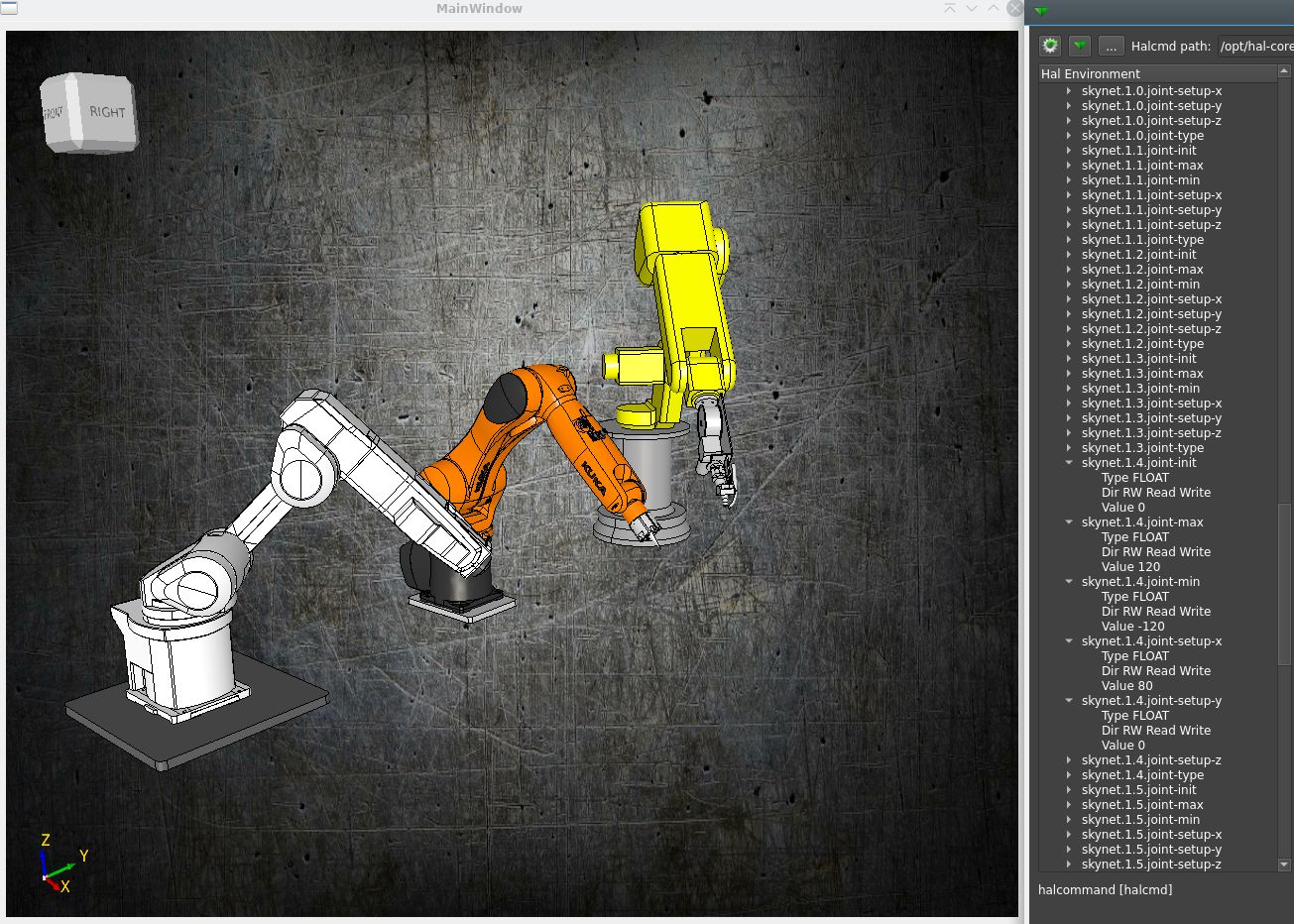
Then i was able to setup a dynamic realtime program. Where you can add multiple robots or gantry's at the same time.
The shape of the machine doens't matter. The machines may even be stacked to each other. The kinematics models can be
stacked and moved around in 3d realtime, connected to the previous 3d node in hal this is possible.
This is really a crazy program.
All my previous code was not dynamic in c. Also the kinematic c++ code was not dynamic for a machine setup.
As far as i am now, This is becoming amazing.
I had to apply some rules to the hal setup, like how do you call machine 0 and machine 1?
How do you organize stepfiles for different models to load etc.
Just a hal-core update.
I started coding from the bottom trough hal, kinematics and opencascade.
A few day's are past.
What i learned is to use dynamic memory allocating in a c coded hal component.
Then i was able to setup a dynamic realtime program. Where you can add multiple robots or gantry's at the same time.
The shape of the machine doens't matter. The machines may even be stacked to each other. The kinematics models can be
stacked and moved around in 3d realtime, connected to the previous 3d node in hal this is possible.
This is really a crazy program.
All my previous code was not dynamic in c. Also the kinematic c++ code was not dynamic for a machine setup.
As far as i am now, This is becoming amazing.
I had to apply some rules to the hal setup, like how do you call machine 0 and machine 1?
How do you organize stepfiles for different models to load etc.
Attachments:
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
10 Nov 2021 11:23 #225957
by Grotius
Replied by Grotius on topic hal-core
Hi,
This is really a crazy program.
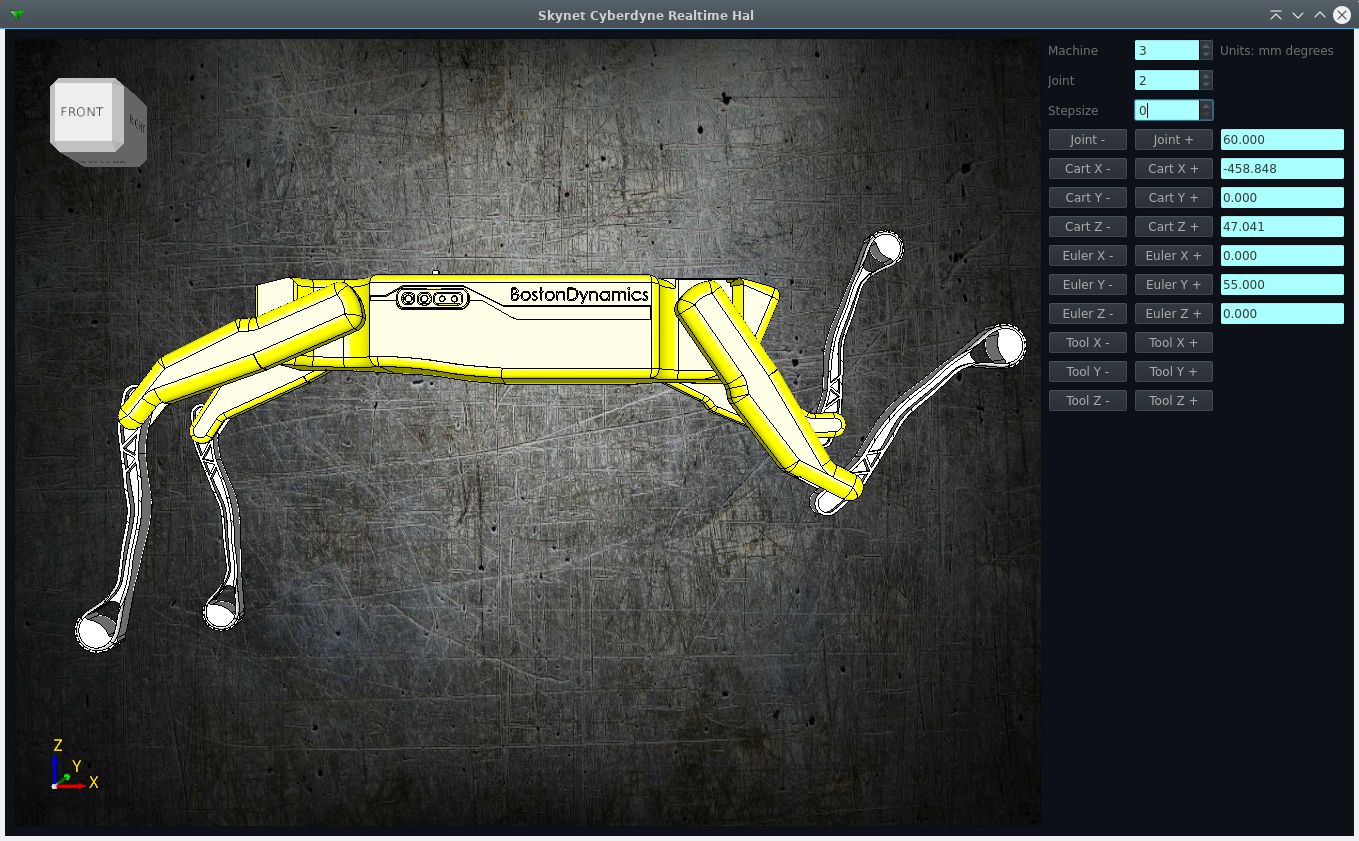
This is a hal-core example of a boston dynamics robot dog. It is equiped with a stack of 4 dynamic kinematic chains.
Each chain representing a dog's leg. The dog can be equipped with secundairy robots on his back wich are slave nodes, connected by 6 hal parameters. Translation + 3d rotate.
The robot dog can perform a s-curve motion profile for the leg's. I think this is a proof of concept hal-core is working dynamicly and
can do complex tasks.
Next item to test is a chirurgical robot operation implementation with hal-core.
By this i mean 2 robot humaniod hands reflecting the real human positions. The data is then transferred trough a internet connection. So i have to make a internet interface for hal-core.
This is really a crazy program.
This is a hal-core example of a boston dynamics robot dog. It is equiped with a stack of 4 dynamic kinematic chains.
Each chain representing a dog's leg. The dog can be equipped with secundairy robots on his back wich are slave nodes, connected by 6 hal parameters. Translation + 3d rotate.
The robot dog can perform a s-curve motion profile for the leg's. I think this is a proof of concept hal-core is working dynamicly and
can do complex tasks.
Next item to test is a chirurgical robot operation implementation with hal-core.
By this i mean 2 robot humaniod hands reflecting the real human positions. The data is then transferred trough a internet connection. So i have to make a internet interface for hal-core.
Attachments:
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- tommylight
-

- Online
- Moderator
-

Less
More
- Posts: 21712
- Thank you received: 7418
10 Nov 2021 12:00 #225964
by tommylight
Replied by tommylight on topic hal-core
This i am interested in.Next item to test is a chirurgical robot operation implementation with hal-core.
By this i mean 2 robot humaniod hands reflecting the real human positions. The data is then transferred trough a internet connection. So i have to make a internet interface for hal-core.
Please Log in or Create an account to join the conversation.
- Reinhard
- Offline
- Platinum Member
-
Less
More
- Posts: 508
- Thank you received: 94
10 Nov 2021 15:55 #225995
by Reinhard
Replied by Reinhard on topic hal-core
Hi Grotius,
I'd like to know, how much linuxcnc do you use?
If I got you right, you said, that you don't use nml - so you probably don't use interpreter and taskmanager.
... and if that is true, how do you do jobs like jogging, touch workpiece, measure toollength or set coordinate systems?
Afaik they are all nml-based.
I'd like to know, how much linuxcnc do you use?
If I got you right, you said, that you don't use nml - so you probably don't use interpreter and taskmanager.
... and if that is true, how do you do jobs like jogging, touch workpiece, measure toollength or set coordinate systems?
Afaik they are all nml-based.
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
- Dave3891
- Offline
- Senior Member
-
Less
More
- Posts: 56
- Thank you received: 7
10 Nov 2021 19:21 #226026
by Dave3891
Replied by Dave3891 on topic hal-core
Hi Grotius,
That is looking really great! There will be a lot more automation applications that it could be use on.
I am away from the shop this week so I won't be able to look at the modifications until next week, but at the rate you are going it will have changed by then haha.
Keep posting updates!
That is looking really great! There will be a lot more automation applications that it could be use on.
I am away from the shop this week so I won't be able to look at the modifications until next week, but at the rate you are going it will have changed by then haha.
Keep posting updates!
The following user(s) said Thank You: Grotius
Please Log in or Create an account to join the conversation.
Time to create page: 0.238 seconds