hal-core
- Grotius
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

Less
More
- Posts: 2419
- Thank you received: 2348
20 Dec 2021 16:24 #229559
by Grotius
Replied by Grotius on topic hal-core
Please Log in or Create an account to join the conversation.
- Dave3891
- Offline
- Senior Member
-

Less
More
- Posts: 56
- Thank you received: 7
20 Dec 2021 23:00 - 20 Dec 2021 23:18 #229577
by Dave3891
Replied by Dave3891 on topic hal-core
Figured out the problem, had to install the qtcreator deb from your github since it was looking for the library in the /opt/qtcreator directory
Hi Grotius,
Have you ever seen this error? I started getting it after I installed Qt Designer (5.15) and I am not sure what I need to do to correct it

Hi Grotius,
Have you ever seen this error? I started getting it after I installed Qt Designer (5.15) and I am not sure what I need to do to correct it
Attachments:
Last edit: 20 Dec 2021 23:18 by Dave3891. Reason: fixed problem
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
22 Dec 2021 11:41 - 22 Dec 2021 12:04 #229719
by Grotius
Replied by Grotius on topic hal-core
Hi Dave,
The quickest way to solve this, is to recomplie the qt part of trajectory component with your qt version.
This type of errors can be caused by a qt library change. Or it can not find the qt libraries.
You can add a : ldconfig ./ path to qt library in the trajectory startup script.
The quickest way to solve this, is to recomplie the qt part of trajectory component with your qt version.
This type of errors can be caused by a qt library change. Or it can not find the qt libraries.
You can add a : ldconfig ./ path to qt library in the trajectory startup script.
Last edit: 22 Dec 2021 12:04 by Grotius.
Please Log in or Create an account to join the conversation.
- cakeslob
- Offline
- Platinum Member
-
Less
More
- Posts: 926
- Thank you received: 278
23 Dec 2021 00:20 #229781
by cakeslob
Replied by cakeslob on topic hal-core
Hey grotius, a few questions. the s curve hal component for syncdof, would you use that within linuxcnc to achieve s curve acceleration smooth accel/decel but while maintaining the linuxcnc path planning?
also, what does it mean, "30 days trial mode", im afraid to ask...
also, what does it mean, "30 days trial mode", im afraid to ask...
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
23 Dec 2021 06:40 #229795
by Grotius
Replied by Grotius on topic hal-core
Hi Cakeslob,
If you use it without any lineair backend you can achieve it in some senarios. But don't expect it will do a nice job with lcnc
at the moment.
Lcnc really needs the full scurve path planner integrated.
To achieve the As=2*Am wich means, Maximum scurve acceleration = 2* Lineair acceleration.
The motion planner has to calculate the path with this formula's.
The 30 days slogan is just a joke inside that component.
If you use it without any lineair backend you can achieve it in some senarios. But don't expect it will do a nice job with lcnc
at the moment.
Lcnc really needs the full scurve path planner integrated.
To achieve the As=2*Am wich means, Maximum scurve acceleration = 2* Lineair acceleration.
The motion planner has to calculate the path with this formula's.
The 30 days slogan is just a joke inside that component.
The following user(s) said Thank You: tjtr33
Please Log in or Create an account to join the conversation.
- Dave3891
- Offline
- Senior Member
-
Less
More
- Posts: 56
- Thank you received: 7
23 Dec 2021 15:18 #229813
by Dave3891
Replied by Dave3891 on topic hal-core
Hi Grotius,
I have been trying out the syncrodofs module and I really like it, I just need to make a module to add its output to an offset so I can have a starting position to feed in to the kinematics module.
But thinking about it, should I use 3 of the sdofs and feed that in to the XYZ of the kinematics?
Or would I take the 6 output from the kinematics and feed that in to 6 sdofs to keep the motion in sync?
Could there be a problem with the max velocities if you sync the XYZ movement and then feed that to the kinematic, since one of the 6 axis might have to move faster than the max velocity to keep up the sync?
I have been trying out the syncrodofs module and I really like it, I just need to make a module to add its output to an offset so I can have a starting position to feed in to the kinematics module.
But thinking about it, should I use 3 of the sdofs and feed that in to the XYZ of the kinematics?
Or would I take the 6 output from the kinematics and feed that in to 6 sdofs to keep the motion in sync?
Could there be a problem with the max velocities if you sync the XYZ movement and then feed that to the kinematic, since one of the 6 axis might have to move faster than the max velocity to keep up the sync?
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
23 Dec 2021 18:07 #229824
by Grotius
Replied by Grotius on topic hal-core
Hi Dave,
If you add a few lines of code inside the synchrodofs halmodule.c pin setup function.
You can add a few hal pins there to create an offset.
and then at last do a recompile with the /opt/hal-core/src/hal/components/synchrodofs/hal/./runtest.
/opt/hal-core/src/hal/components/test/test.c exactly shows how to add hal pins and set a value to a pin like the enable pin is doing
over there.
I think kinematics are 1 to 1 connected to lcnc's trajectory tcp output at servo thread speed.
Then the kinematics output can go to the dofs.so or synchrodofs.so modules, depending on what you want.
Could there be a problem with the max velocities if you sync the XYZ movement and then feed that to the kinematic, since one of the 6 axis might have to move faster than the max velocity to keep up the sync?
In general for ruckig, i think it's synchronised to respect the slowest dofs. So yes it could bring you into a problem.
For simple xyz tcp path following, synchronization has in my
opinion not really benefits, it can have even more downsides, like huge memory loads.
Or would I take the 6 output from the kinematics and feed that in to 6 sdofs to keep the motion in sync?
I personally would take the dofs component. /opt/hal-core/src/hal/components/dofs/hal
This is a runtime fast solution. And yes. After the kinematics using a Dofs make's sence.
Some background info. There are options to set some dofs values in the cpp_interface files.
This are all the enums explained :
If you add a few lines of code inside the synchrodofs halmodule.c pin setup function.
You can add a few hal pins there to create an offset.
and then at last do a recompile with the /opt/hal-core/src/hal/components/synchrodofs/hal/./runtest.
/opt/hal-core/src/hal/components/test/test.c exactly shows how to add hal pins and set a value to a pin like the enable pin is doing
over there.
I think kinematics are 1 to 1 connected to lcnc's trajectory tcp output at servo thread speed.
Then the kinematics output can go to the dofs.so or synchrodofs.so modules, depending on what you want.
Could there be a problem with the max velocities if you sync the XYZ movement and then feed that to the kinematic, since one of the 6 axis might have to move faster than the max velocity to keep up the sync?
In general for ruckig, i think it's synchronised to respect the slowest dofs. So yes it could bring you into a problem.
For simple xyz tcp path following, synchronization has in my
opinion not really benefits, it can have even more downsides, like huge memory loads.
Or would I take the 6 output from the kinematics and feed that in to 6 sdofs to keep the motion in sync?
I personally would take the dofs component. /opt/hal-core/src/hal/components/dofs/hal
This is a runtime fast solution. And yes. After the kinematics using a Dofs make's sence.
Some background info. There are options to set some dofs values in the cpp_interface files.
This are all the enums explained :
- //! enum: position, velocity
- in.control_interface=ruckig::ControlInterface::Position;
- //! Phase, ///< Phase synchronize the DoFs when possible, else fallback to "Time" strategy
- //! Time, ///< Always synchronize the DoFs to reach the target at the same time (Default)
- //! TimeIfNecessary, ///< Synchronize only when necessary (e.g. for non-zero target velocity or acceleration)
- //! None, ///< Calculate every DoF independently
- in.synchronization=ruckig::Synchronization::None;
- //! Continuous, ///< Every trajectory duration is allowed (Default)
- //! Discrete, ///< The trajectory duration must be a multiple of the control cycle
- in.duration_discretization=ruckig::DurationDiscretization::Continuous;
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
10 Jan 2022 05:16 #231282
by Grotius
Replied by Grotius on topic hal-core
Hi,
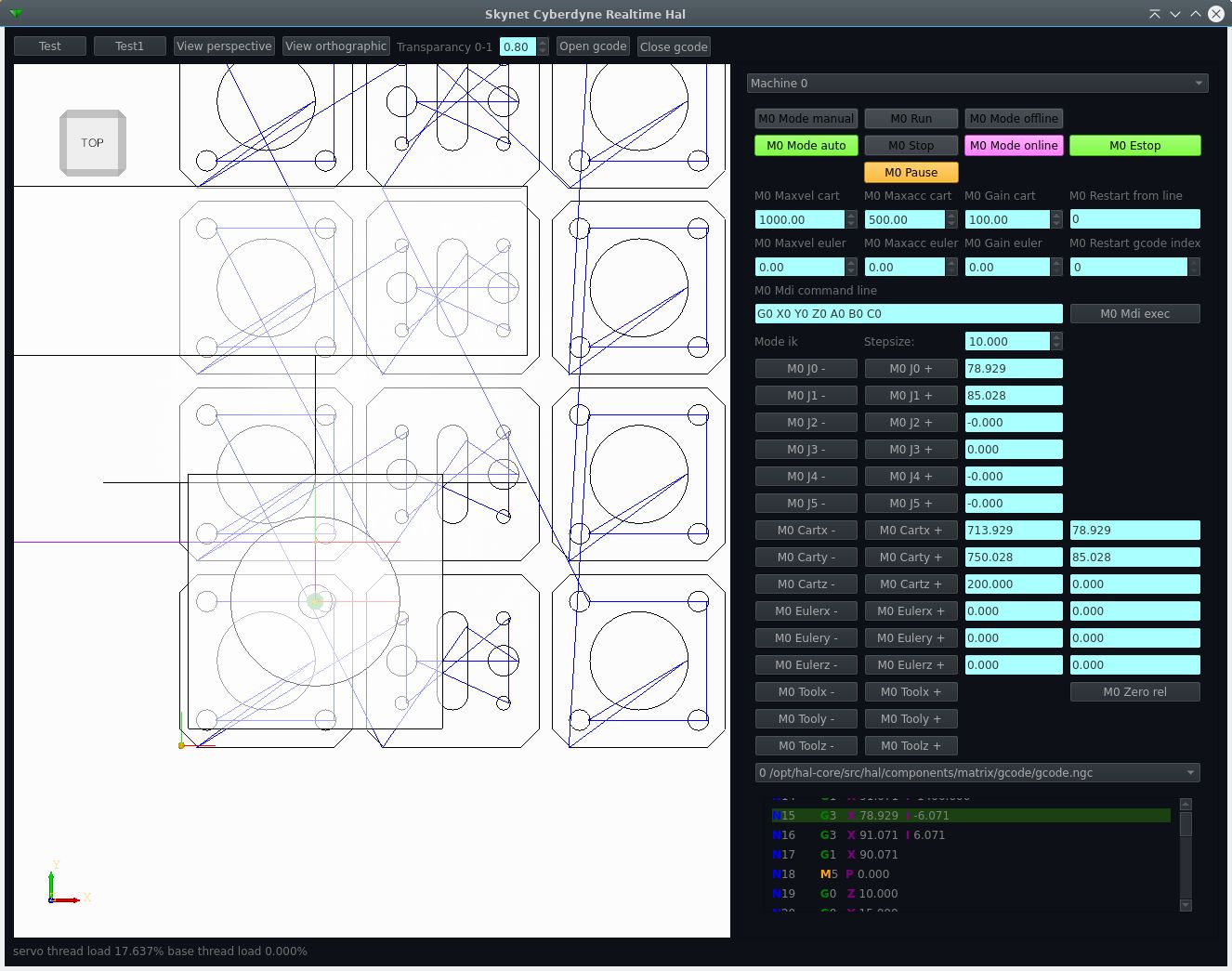
Just did a archive update for hal-core.
The update is showing the matrix component doing a gcode motion.
The motion is done by a new trajectory planner i am coding at the moment.
I had difficult times to code this. Mainly trough the user interupts like velocity changes during runtime in combination
with a new scurve library.
A short video
Just did a archive update for hal-core.
The update is showing the matrix component doing a gcode motion.
The motion is done by a new trajectory planner i am coding at the moment.
I had difficult times to code this. Mainly trough the user interupts like velocity changes during runtime in combination
with a new scurve library.
- The trajectory planner has the s-curve implementation.
- It accepts acceleration changes during runtime.
- It accepts velocity changes during runtime.
- It can do a forward motion trajectory.
- It can do a reversed motion trajectory.
A short video
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
10 Jan 2022 05:21 #231283
by Grotius
Replied by Grotius on topic hal-core
Attachments:
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- Grotius
-
Topic Author
- Offline
- Platinum Member
-
Less
More
- Posts: 2419
- Thank you received: 2348
13 Jan 2022 10:01 #231646
by Grotius
Replied by Grotius on topic hal-core
Hi,
A tiny update.
I am soon at the point it is usable software for motion planning.
Some effort is done to get the source code nice and clean.
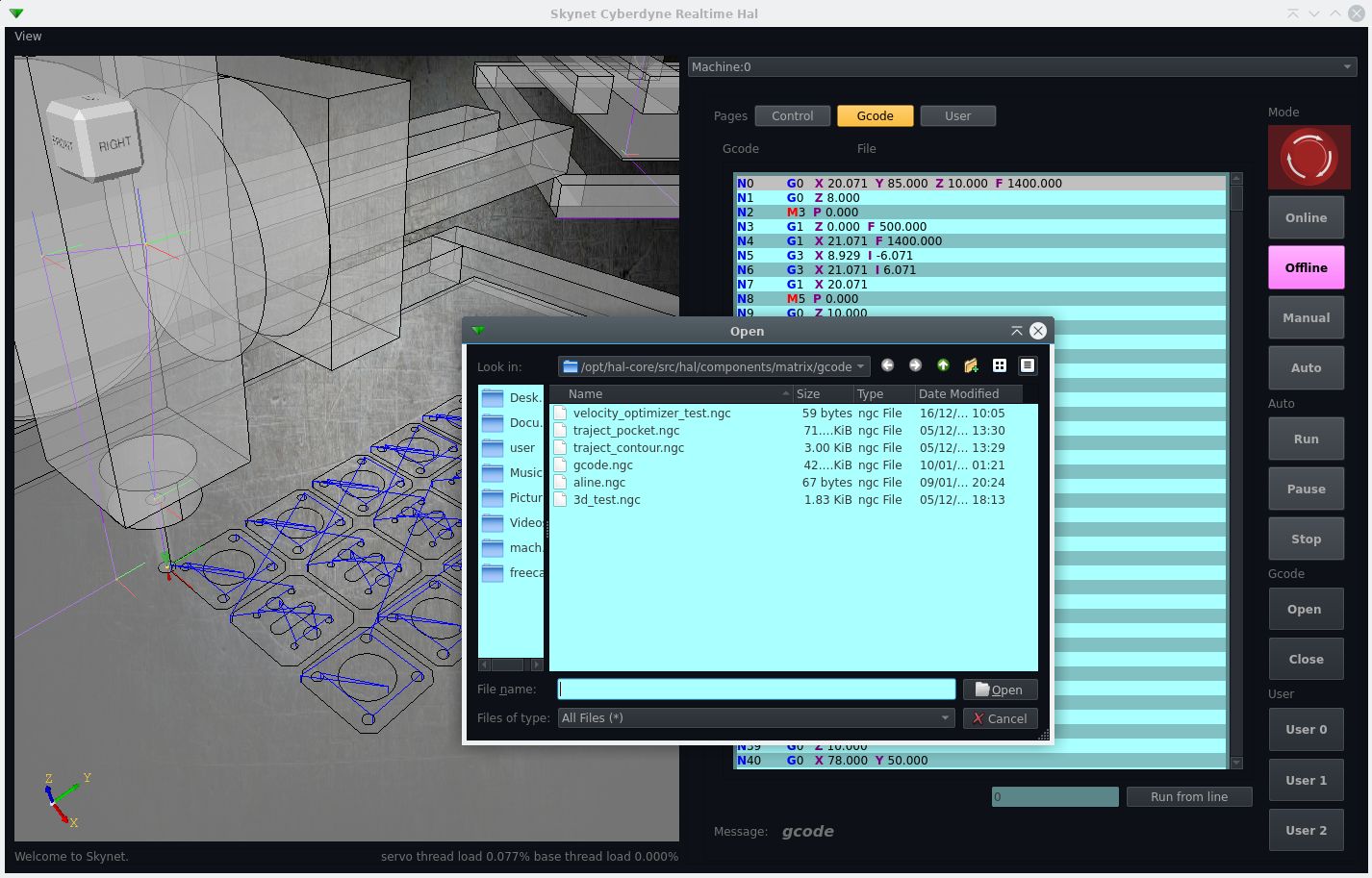
It's still possible to load multiple machines at the same time, including separate gcode and motion at the same time.
I coded every machine as a stand alone widget. Then the program load's an instance of the widget, like "machine 1=new widget"
The gcode can be rotated and placed on the machine bed in 3d.
The machine will follow the 3d gcode positions relative.
The machine can be a robot, a gantry or a exotic kinematic model.
The entire program is just one hal-component, in this case called "matrix.so"
I have to code some parts yet. But the diffuculties are behind us now !
So far so good. And don't forget your 4'th and 5'th and 6'th booster shot.
A tiny update.
I am soon at the point it is usable software for motion planning.
Some effort is done to get the source code nice and clean.
It's still possible to load multiple machines at the same time, including separate gcode and motion at the same time.
I coded every machine as a stand alone widget. Then the program load's an instance of the widget, like "machine 1=new widget"
The gcode can be rotated and placed on the machine bed in 3d.
The machine will follow the 3d gcode positions relative.
The machine can be a robot, a gantry or a exotic kinematic model.
The entire program is just one hal-component, in this case called "matrix.so"
I have to code some parts yet. But the diffuculties are behind us now !
So far so good. And don't forget your 4'th and 5'th and 6'th booster shot.
The following user(s) said Thank You: tommylight, Clive S, bkt
Please Log in or Create an account to join the conversation.
Time to create page: 0.990 seconds