servo dac offset
- bkt
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

- Posts: 1111
- Thank you received: 114
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

- Posts: 17927
- Thank you received: 5251
DRIVE-ENA --> 7I77-ENA+
DRIVE-GND --> 7I77-ENA-
Please Log in or Create an account to join the conversation.
- bkt
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 1111
- Thank you received: 114
Obviusly You are in right.
regards
Giorgio
Please Log in or Create an account to join the conversation.
- bkt
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 1111
- Thank you received: 114

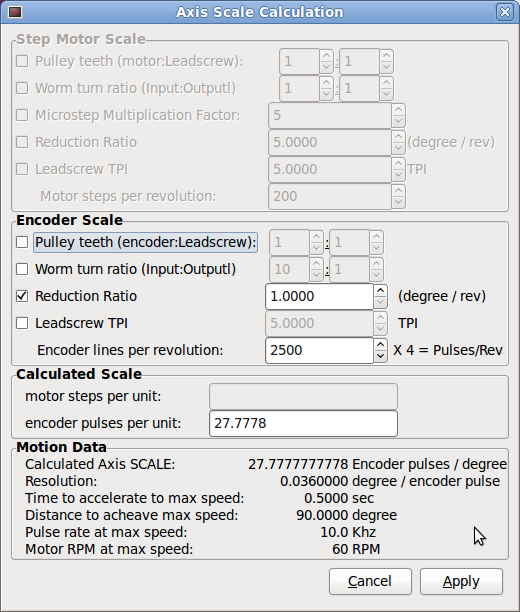
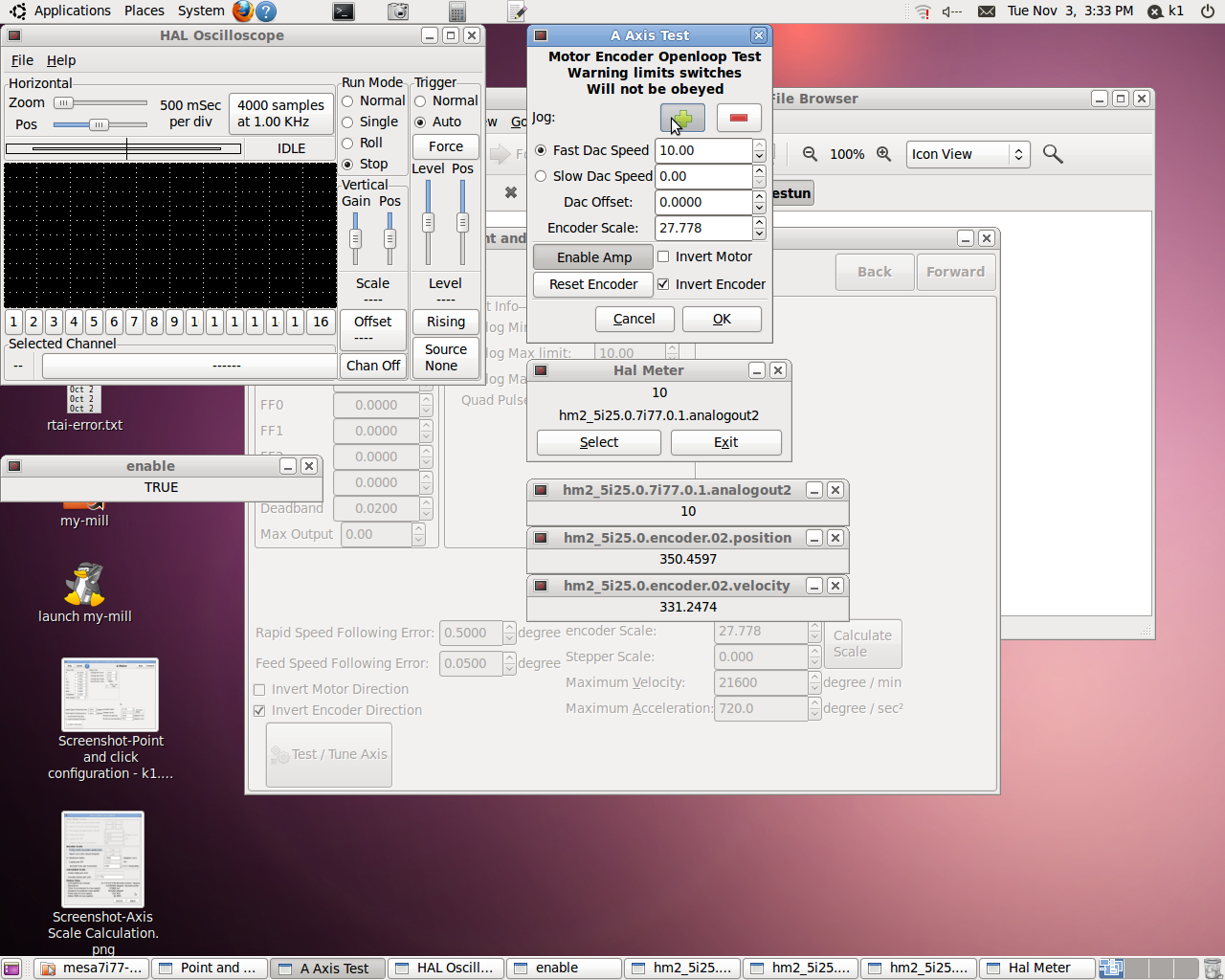
and result ini file (NOTE OLY AXIS 3=a IS CONFIGURATED... I'M IN TRIAL TEST)
At 10V reference motor make 60rpm as described in pnconfig ..... but when start axis and try to move (in jog) A axis I receive follow error axis ..... someone has suggest??
Regards
Giorgio
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
- Posts: 17927
- Thank you received: 5251
with a .05 degree following error limit you cannot tell if the system runs away (backwards feedback)
or you just dont have tuning good enough
Please Log in or Create an account to join the conversation.
- bkt
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 1111
- Thank you received: 114
Openloop test in pncconf the only thing it does is send out the analog signal set .... I guess it's true ?
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
- Posts: 17927
- Thank you received: 5251
Do you get any motion with LinuxCNC?
Are the drives enabled when Linuxcnc is running? (out of ESTOP and in machine-on state)
Please Log in or Create an account to join the conversation.
- bkt
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 1111
- Thank you received: 114
hm2_encoder.02.velocity It must correspond to the motor speed ? Because in these case when motor at 10V go to 50rpm these param hm2_encoder.02.velocity go to 299/300 .... is normal these?
Regards
Giorgio
Please Log in or Create an account to join the conversation.
- PCW
-
- Offline
- Moderator
-
- Posts: 17927
- Thank you received: 5251
Yes, when run drive go enable .... and with a wrong config the follow error come out after a little step of motor ....
This is why you need to set the following errors wider so you can see whats going on
Please Log in or Create an account to join the conversation.
- bkt
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 1111
- Thank you received: 114
hm2_encoder.02.velocity It must correspond to the motor speed ? Because in these case when motor at 10V go to 50rpm these param hm2_encoder.02.velocity go to 299/300 .... is normal these?
Yes is normal ...... from www.linuxcnc.org/docs/html/man/man9/hostmot2.9.html ...... " (float out) velocity Estimated encoder velocity in position units per second." ...... 50rpm = 0.83333 spsec = 300°/sec (degree is my unity) .....
Please Log in or Create an account to join the conversation.