Installing Uspace for Master
- rodw
-
 Topic Author
Topic Author
- Offline
- Platinum Member
-

- Posts: 11994
- Thank you received: 4084
forum.linuxcnc.org/49-basic-configuratio...works?start=10#83754
I think I know whats going on.
Xenomai is a realtime prerequisite and needs to be installed via another patch to the kernel code so instaling from apt-get breaks the preemptive kernel
So the question I now have is Xenomai required on a preemptive kernel? If not I can just modify the configure script to skip the test for Xenomai.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
- Posts: 1317
- Thank you received: 453
Forget about the ./configure uspace, it only works on debian.
Instead start with ./autogen and those four commands.
They will fail due to missing programs and packages.
You need to manually install all those missing packages
using whatever paackage management is in Mint.
Some packages are easy to guess, some packages are harder
to guess and some googling will probably be required.
Then when linuxcnc is built you might need to install
even more packages to get guis going.
A week ago there was a thread about building linuxcnc
for ubunto 16.04. It is the same situation here.
Please Log in or Create an account to join the conversation.
- cncnoob1979
-

- Offline
- Platinum Member
-
- Posts: 403
- Thank you received: 75
It was quite easy. The steps involved are not difficult and surprised me greatly.
> git clone git://git.linuxcnc.org/git/linuxcnc.git linuxcnc-dev
> cd linuxcnc-dev/src
> git checkout 2.7 [what ever branch you want, or skip this step for master]
> ./autogen.sh
> ./configure --with-realtime=/usr/realtime-3.4-9-rtai-686-pae
> make -j2 [the number of cpu cores you have- speeds up compiling-Parallel compilation]
> sudo make setuid
> source ../scripts/rip-environment
> linuxcncI am using RTAI as you can see. My system is currently running Linux Mint 17.3, I tested 2.8 pre / 2.7.8. After testing I ran make clean, to reset the source. Until now, I had previously built a deb for linuxcnc 7.4 which is installed, and I did not remove it while testing. I plan on removing my deb and only using the RIP method now.
RIP is so much easier, you can do a "git pull" and update very easily.
Just make sure you check out the branch you are wanting or else you will automatically build master.
When ready to change branches you have to:
> make clean
> git checkout 2.7
> ./autogen.sh
> ./configure --with-realtime=/usr/realtime-3.4-9-rtai-686-pae
> make -j2
> sudo make setuid
> source ../scripts/rip-environment
> linuxcncHopefully that is clear. Ask if you have any questions.
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 11994
- Thank you received: 4084
I need master for preemptive kernel so the only thing I need to understand is what the parameter is here is for premptive.
./configure --with-realtime=/usr/realtime-3.4-9-rtai-686-paePlease Log in or Create an account to join the conversation.
- cncnoob1979
-
- Offline
- Platinum Member
-
- Posts: 403
- Thank you received: 75
")
You do not need to configure the debian side of things. Just need to link the source to your real time kernel. I would believe it is in the same /usr area.
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-

- Posts: 17961
- Thank you received: 5265
./autogen.sh
./configure --with-realtime=uspace
make clean
make
sudo make setuid
to run the software go back to the top level directory, and issue:
. scripts/rip-environment
linuxcnc
Please Log in or Create an account to join the conversation.
- cncnoob1979
-
- Offline
- Platinum Member
-
- Posts: 403
- Thank you received: 75
Its plainly listed in the doc's. I overlooked them!
--with-realtime=uspace
Build for any realtime platform, or for non-realtime. The resulting LinuxCNC executables will run on both a Linux kernel with Preempt-RT patches (providing realtime machine control) and on a vanilla (un-patched) Linux kernel (providing G-code simulation but no realtime machine control). If development files are installed for Xenomai (typically from package libxenomai-dev) or RTAI (typically from a package with a name starting "rtai-modules"), support for these real-time kernels will also be enabled.
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 11994
- Thank you received: 4084
I've been playing in the ./debian folder when I should have been in the ./src folder.
I will try and document it once I work it out.
Please Log in or Create an account to join the conversation.
- rodw
-
Topic Author
- Offline
- Platinum Member
-
- Posts: 11994
- Thank you received: 4084
And stepper motors attached to my Mesa 7i76e go round too!
It seems that many of the problems discussed elsewhere about missing dependencies have been fixed in master and many of them have ./configure options to disable them anyway.
I was unable to run dpkg-checkbuilddeps so I just kept running ./configure and fixing the dependencies one by one. Here are modules I installed (there may be a couple of extra ones not needed in this list based on the solutions I found to solve them).
glib-2.0
libgtk2.0-dev
tclx8.6
tk8.6-dev
bwidget
libtk-img
libreadline-gplv2-dev
libboost-all-dev
libsdl1.2-dev
libgl1-mesa-dev
libglu1-mesa-dev
libsdl-image1.2
libsdl-image1.2-dev
libxmu-devFor some reason, the linuxcnc-dev folders were owned by root so I had to fix the permissions
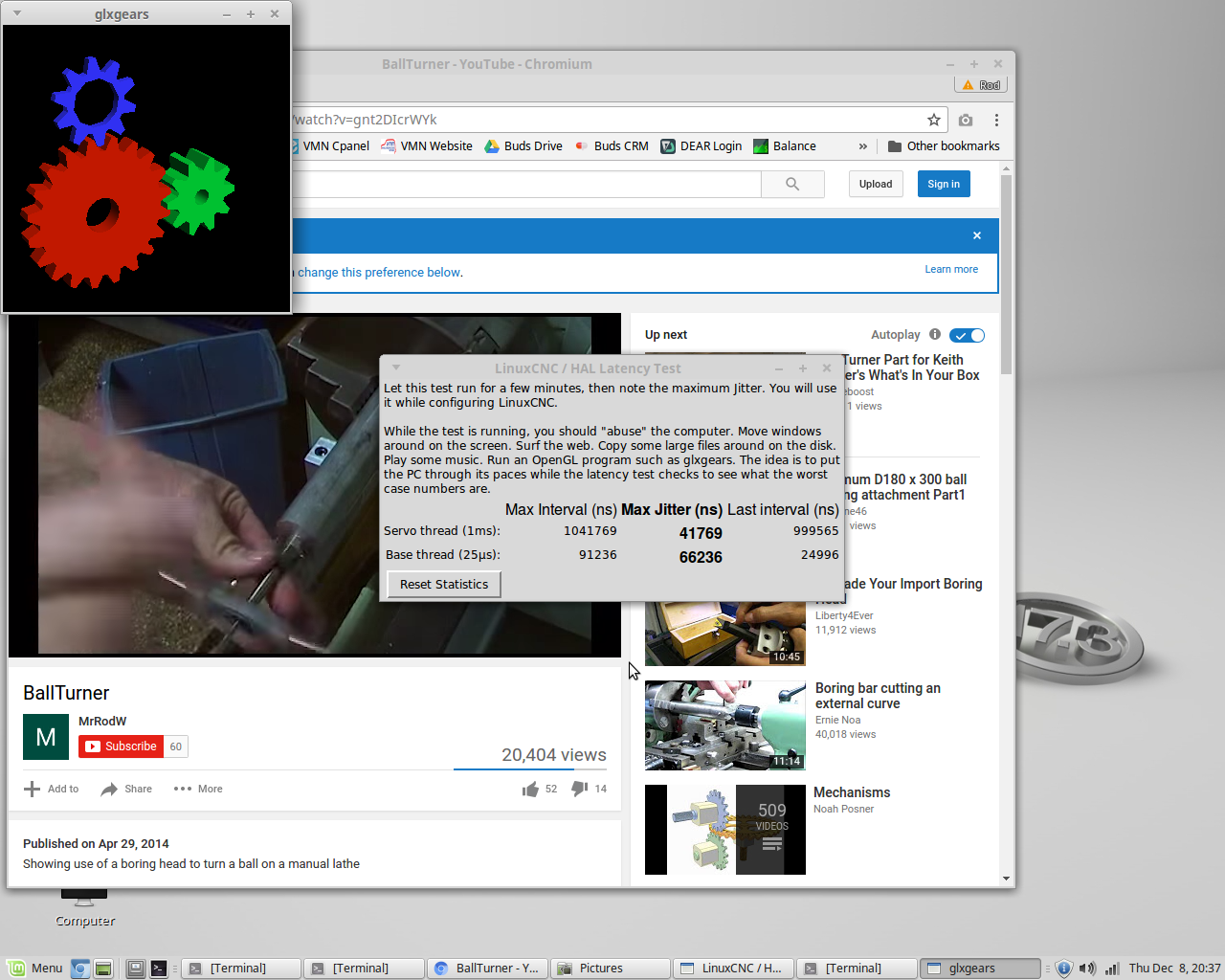
I'm quite happy with the latency given the base thread won't be used and I'm using Mesa ethernet cards (and the PC is only 4" square)
I still don't understand this and how I can make that happen on start up everytime I boot up
. scripts/rip-environmentThanks so much to you guys, your support has been awesome
Please Log in or Create an account to join the conversation.
- cncnoob1979
-
- Offline
- Platinum Member
-
- Posts: 403
- Thank you received: 75
2.10. Reconfiguring LinuxCNC
If you compile for realtime in a directory tree (git checkout), and then later reconfigure for --enable-simulator, you must do
make clean to get rid of the realtime object files. The same applies when switching from simulation to realtime. This is because "make" doesn't know that you've changed modes. It only sees that the object files are newer than the source, and thinks they don't need to be recompiled.
Another potential problem when switching from realtime to simulation is environment variables. The command
. scripts/rip-environment
sets some environment variables in your shell to point to various parts of the run-in-place code. Some of those variables are different for realtime vs. simulation. If you switch modes, you should close the shell you were using, open a new one, and run . scripts/rip-environment before starting LinuxCNC from that shell.
The same issues can arise if you have multiple git checkouts and switch between them using the same shell. If you are switching between versions or checkouts, it is best to use one shell for each one.
Source is on the Wiki.
#!/bin/bash
cd ~/linuxcnc-dev
. scripts/rip-environment
linuxcnc /path/to/machine.iniYou can create a blank document on the desktop to launch as executable with these imbedded commands. This is how I launch linuxcnc.
The above quote from the wiki explains why the script is needed for RIP.
Please Log in or Create an account to join the conversation.