Marco Reps video on youtube about EtherCAT
- onceloved
-

- Offline
- Premium Member
-

- Posts: 133
- Thank you received: 59
Please Log in or Create an account to join the conversation.
- onceloved
-
- Offline
- Premium Member
-
- Posts: 133
- Thank you received: 59
Please Log in or Create an account to join the conversation.
- Evgeny
- Offline
- New Member
-

- Posts: 14
- Thank you received: 3
I followed all the steps in this instruction.Clone these 2 repos (or download az zip)
github.com/marcoreps/linuxcnc_leadshine_EL8
github.com/LinuxCNC
Clopy from the second these files in to a known directory (/home/cnc/linuxcnc-dev/emc/motion/) for example.
homing.c
homing.h
motion.h
from the first repo, edit the el8_homecomp file, and change the path to homing.c file, to where you saved your files.
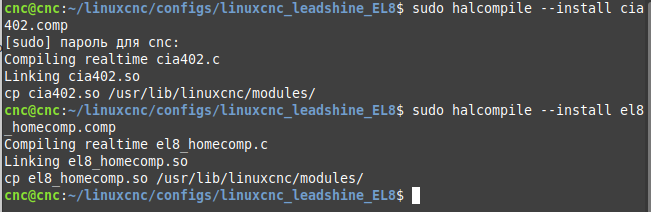
compile the cia402.comp:
sudo homecomp --install cia402.comp
compile the el8_homecomp.comp:
sudo homecomp --install el8_homecomp.comp
edit your axis.ini (or whatever is your gui)
after the EMCMOT, paste this line:
HOMEMOD=el8_homecomp
[EMCMOT]
EMCMOT = motmod
COMM_TIMEOUT = 1.0
SERVO_PERIOD = 1000000
HOMEMOD=el8_homecomp
I had problems with this point.So thats it. The rest is setting up the servos, and the internal homing in the drives. Without it, you can not use this process, since the servos not responding to homing request.
I can't figure out yet which parameter in the servo I should change

Attachments:
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

- Posts: 12035
- Thank you received: 4107
We usually use Teamviewer but you must be using an Xorg desktop not WaylandCan anyone recommend a low-latency remote assistance software?
Please Log in or Create an account to join the conversation.
- Evgeny
- Offline
- New Member
-
- Posts: 14
- Thank you received: 3
www.leadshine.com/upfiles/downloads/80d2...d8_1687682456724.pdf
Please Log in or Create an account to join the conversation.
- chrisfischer
- Offline
- Senior Member
-

- Posts: 44
- Thank you received: 10
kira@Kira:~/dev/hal-cia402$ halcmd loadusr -W lcec_conf ethercat-conf.xml
<commandline>:0: execv(lcec_conf): No such file or directory
<commandline>:0: waitpid failed lcec_conf lcec_conf
<commandline>:0: lcec_conf exited without becoming readyPlease Log in or Create an account to join the conversation.
- Evgeny
- Offline
- New Member
-
- Posts: 14
- Thank you received: 3
I too am having trouble with the ethercat install. Looks like the issue is very similar to Evgeny. I am able to see the ethercat slaves at this point but when I try to interact with lcec_conf it errors. I searched the computer and cannot find lcec_conf anywhere.
Hi. If you figure out how I can send you 10GB of data, I can send you an acronis image of my system, the drivers are already installed and the configuration runs. But I can't set up homing yet.
Please Log in or Create an account to join the conversation.
- jimwhiting
- Offline
- Junior Member
-

- Posts: 35
- Thank you received: 6
Please Log in or Create an account to join the conversation.
- Evgeny
- Offline
- New Member
-
- Posts: 14
- Thank you received: 3
/home/cnc/hal-cia402
o_O

Please Log in or Create an account to join the conversation.
- chrisfischer
- Offline
- Senior Member
-
- Posts: 44
- Thank you received: 10
Good question, should have mentioned. yes its in there. it wasnt clear from the instructions if anything else is needed like hal files etc.Is the ethercat-conf.xml file in the ~/dev/hal-cia402 directory?
So right now there is the ethercat-conf.xml the cia402.comp and the lincense and readme files. there is also an example folder with a less complete ethercat-conf.
i used the marcos ethercat-conf file and removed some info as i only have two drives under power right now.
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="-1">
<!-- A axis EL8 Servo Drive -->
<slave idx="0" type="generic" vid="00004321" pid="000010c3" configPdos="true">
<dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
<syncManager idx="2" dir="out">
<pdo idx="1601">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="cia-controlword" halType="u32"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="s32"/>
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="target-position" halType="s32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="cia-statusword" halType="u32"/>
<pdoEntry idx="6061" subIdx="00" bitLen="8" halPin="opmode-display" halType="s32"/>
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="actual-position" halType="s32"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="actual-velocity" halType="s32"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="actual-torque" halType="s32"/>
</pdo>
</syncManager>
</slave>
<!-- Z axis EL8 Servo Drive -->
<slave idx="1" type="generic" vid="00004321" pid="000010c2" configPdos="true">
<dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
<syncManager idx="2" dir="out">
<pdo idx="1601">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="cia-controlword" halType="u32"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="s32"/>
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="target-position" halType="s32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="cia-statusword" halType="u32"/>
<pdoEntry idx="6061" subIdx="00" bitLen="8" halPin="opmode-display" halType="s32"/>
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="actual-position" halType="s32"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="actual-velocity" halType="s32"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="actual-torque" halType="s32"/>
</pdo>
</syncManager>
</slave>
</master>
</masters>
Please Log in or Create an account to join the conversation.