Marco Reps video on youtube about EtherCAT
- jjdege
-

- Offline
- Premium Member
-

- Posts: 125
- Thank you received: 37
I think in the .xml file slave idx should start from 0

Attachments:
Please Log in or Create an account to join the conversation.
- Evgeny
- Offline
- New Member
-

- Posts: 14
- Thank you received: 3
I don't quite understand what I should doWhen I configured my xml file I used the halrun to load lcec_conf from the command line without the GUI to check it was all okay.

Can you do "ethercat -v slaves" to grab the model numbers etc just to check they match your XML. After that you will need to catch a more specific error out of the lcec_conf output to narrow down what is wrong.
cnc@cnc:~$ ethercat -v slaves
=== Master 0, Slave 0 ===
Device: Main
State: PREOP
Flag: +
Identity:
Vendor Id: 0x00004321
Product code: 0x000010c2
Revision number: 0x00000001
Serial number: 0x00000000
DL information:
FMMU bit operation: no
Distributed clocks: yes, 64 bit
DC system time transmission delay: 0 ns
Port Type Link Loop Signal NextSlave RxTime [ns] Diff [ns] NextDc [ns]
0 MII up open yes - 3389267290 0 0
1 MII up open yes 1 3389271570 4280 640
2 N/A down closed no - - - -
3 N/A down closed no - - - -
Mailboxes:
Bootstrap RX: 0x1000/124, TX: 0x1100/128
Standard RX: 0x1000/124, TX: 0x1100/124
Supported protocols: CoE, FoE
General:
Group: Servo Drive
Image name:
Order number: EL8-EC400
Device name: EL8-EC400(COE)
CoE details:
Enable SDO: yes
Enable SDO Info: no
Enable PDO Assign: yes
Enable PDO Configuration: yes
Enable Upload at startup: no
Enable SDO complete access: no
Flags:
Enable SafeOp: no
Enable notLRW: no
Current consumption: 0 mA
=== Master 0, Slave 1 ===
Device: Main
State: PREOP
Flag: +
Identity:
Vendor Id: 0x00004321
Product code: 0x000010c2
Revision number: 0x00000001
Serial number: 0x00000000
DL information:
FMMU bit operation: no
Distributed clocks: yes, 64 bit
DC system time transmission delay: 640 ns
Port Type Link Loop Signal NextSlave RxTime [ns] Diff [ns] NextDc [ns]
0 MII up open yes 0 3385674850 0 640
1 MII up open yes 2 3385677850 3000 620
2 N/A down closed no - - - -
3 N/A down closed no - - - -
Mailboxes:
Bootstrap RX: 0x1000/124, TX: 0x1100/128
Standard RX: 0x1000/124, TX: 0x1100/124
Supported protocols: CoE, FoE
General:
Group: Servo Drive
Image name:
Order number: EL8-EC400
Device name: EL8-EC400(COE)
CoE details:
Enable SDO: yes
Enable SDO Info: no
Enable PDO Assign: yes
Enable PDO Configuration: yes
Enable Upload at startup: no
Enable SDO complete access: no
Flags:
Enable SafeOp: no
Enable notLRW: no
Current consumption: 0 mA
=== Master 0, Slave 2 ===
Device: Main
State: PREOP
Flag: +
Identity:
Vendor Id: 0x00004321
Product code: 0x000010c2
Revision number: 0x00000001
Serial number: 0x00000000
DL information:
FMMU bit operation: no
Distributed clocks: yes, 64 bit
DC system time transmission delay: 1260 ns
Port Type Link Loop Signal NextSlave RxTime [ns] Diff [ns] NextDc [ns]
0 MII up open yes 1 3414406970 0 620
1 MII up open yes 3 3414408730 1760 580
2 N/A down closed no - - - -
3 N/A down closed no - - - -
Mailboxes:
Bootstrap RX: 0x1000/124, TX: 0x1100/128
Standard RX: 0x1000/124, TX: 0x1100/124
Supported protocols: CoE, FoE
General:
Group: Servo Drive
Image name:
Order number: EL8-EC400
Device name: EL8-EC400(COE)
CoE details:
Enable SDO: yes
Enable SDO Info: no
Enable PDO Assign: yes
Enable PDO Configuration: yes
Enable Upload at startup: no
Enable SDO complete access: no
Flags:
Enable SafeOp: no
Enable notLRW: no
Current consumption: 0 mA
=== Master 0, Slave 3 ===
Device: Main
State: PREOP
Flag: +
Identity:
Vendor Id: 0x00000002
Product code: 0x044c2c52
Revision number: 0x00110000
Serial number: 0x00000000
DL information:
FMMU bit operation: no
Distributed clocks: yes, 64 bit
DC system time transmission delay: 1840 ns
Port Type Link Loop Signal NextSlave RxTime [ns] Diff [ns] NextDc [ns]
0 MII up open yes 2 3342102522 0 580
1 EBUS up open yes 4 3342103122 600 145
2 MII down closed no - - - -
3 N/A down closed no - - - -
General:
Group: SystemBk
Image name:
Order number: EK1100
Device name: EK1100 EtherCAT-Koppler (2A E-Bus)
Flags:
Enable SafeOp: no
Enable notLRW: no
Current consumption: -2000 mA
=== Master 0, Slave 4 ===
Device: Main
State: PREOP
Flag: +
Identity:
Vendor Id: 0x00000002
Product code: 0x03f03052
Revision number: 0x00100000
Serial number: 0x00000000
DL information:
FMMU bit operation: no
Distributed clocks: yes, 64 bit
DC system time transmission delay: 1985 ns
Port Type Link Loop Signal NextSlave RxTime [ns] Diff [ns] NextDc [ns]
0 EBUS up open yes 3 3343222302 0 145
1 EBUS up open yes 5 3343222612 310 155
2 N/A down closed no - - - -
3 N/C down closed no - - - -
General:
Group: DigIn
Image name: TERM_DI
Order number: EL1008
Device name: EL1008 8K. Dig. Eingang 24V, 3ms
Flags:
Enable SafeOp: no
Enable notLRW: no
Current consumption: 90 mA
=== Master 0, Slave 5 ===
Device: Main
State: PREOP
Flag: +
Identity:
Vendor Id: 0x00000002
Product code: 0x07d83052
Revision number: 0x00100000
Serial number: 0x00000000
DL information:
FMMU bit operation: no
Distributed clocks: yes, 64 bit
DC system time transmission delay: 2140 ns
Port Type Link Loop Signal NextSlave RxTime [ns] Diff [ns] NextDc [ns]
0 EBUS up open yes 4 3342558942 0 155
1 EBUS down closed no - - - -
2 N/A down closed no - - - -
3 N/C down closed no - - - -
General:
Group: DigOut
Image name:
Order number: EL2008
Device name: EL2008 8K. Dig. Ausgang 24V, 0.5A
Flags:
Enable SafeOp: no
Enable notLRW: no
Current consumption: 110 mA
cnc@cnc:~$ HelloHI
I think in the .xml file slave idx should start from 0

Yes, it confused me too, I redid it, but it didn't change anything
<masters>
<master idx="0" appTimePeriod="1000000" refClockSyncCycles="5">
<!-- Z axis EL8 Servo Drive -->
<slave idx="0" type="generic" vid="00004321" pid="000010c2" configPdos="true">
<dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
<syncManager idx="2" dir="out">
<pdo idx="1601">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="cia-controlword" halType="u32"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="s32"/>
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="target-position" halType="s32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="cia-statusword" halType="u32"/>
<pdoEntry idx="6061" subIdx="00" bitLen="8" halPin="opmode-display" halType="s32"/>
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="actual-position" halType="s32"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="actual-velocity" halType="s32"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="actual-torque" halType="s32"/>
</pdo>
</syncManager>
</slave>
<!-- Y axis EL8 Servo Drive -->
<slave idx="1" type="generic" vid="00004321" pid="000010c2" configPdos="true">
<dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
<syncManager idx="2" dir="out">
<pdo idx="1601">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="cia-controlword" halType="u32"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="s32"/>
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="target-position" halType="s32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="cia-statusword" halType="u32"/>
<pdoEntry idx="6061" subIdx="00" bitLen="8" halPin="opmode-display" halType="s32"/>
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="actual-position" halType="s32"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="actual-velocity" halType="s32"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="actual-torque" halType="s32"/>
</pdo>
</syncManager>
</slave>
<!-- X axis EL8 Servo Drive -->
<slave idx="2" type="generic" vid="00004321" pid="000010c2" configPdos="true">
<dcConf assignActivate="300" sync0Cycle="*1" sync0Shift="0"/>
<syncManager idx="2" dir="out">
<pdo idx="1601">
<pdoEntry idx="6040" subIdx="00" bitLen="16" halPin="cia-controlword" halType="u32"/>
<pdoEntry idx="6060" subIdx="00" bitLen="8" halPin="opmode" halType="s32"/>
<pdoEntry idx="607A" subIdx="00" bitLen="32" halPin="target-position" halType="s32"/>
</pdo>
</syncManager>
<syncManager idx="3" dir="in">
<pdo idx="1a00">
<pdoEntry idx="6041" subIdx="00" bitLen="16" halPin="cia-statusword" halType="u32"/>
<pdoEntry idx="6061" subIdx="00" bitLen="8" halPin="opmode-display" halType="s32"/>
<pdoEntry idx="6064" subIdx="00" bitLen="32" halPin="actual-position" halType="s32"/>
<pdoEntry idx="606C" subIdx="00" bitLen="32" halPin="actual-velocity" halType="s32"/>
<pdoEntry idx="6077" subIdx="00" bitLen="16" halPin="actual-torque" halType="s32"/>
</pdo>
</syncManager>
</slave>
<slave idx="3" type="EK1100"/>
<slave idx="4" type="EL1008"/>
<slave idx="5" type="EL2008"/>
</master>
</masters>
Attachments:
Please Log in or Create an account to join the conversation.
- jjdege
-
- Offline
- Premium Member
-
- Posts: 125
- Thank you received: 37

I looked at Rod's configuration here , and the device has no name.
maybe with cia.402 it is not needed
Attachments:
Please Log in or Create an account to join the conversation.
- onceloved
-

- Offline
- Premium Member
-
- Posts: 133
- Thank you received: 59
Please Log in or Create an account to join the conversation.
- rodw
-

- Offline
- Platinum Member
-

- Posts: 12035
- Thank you received: 4107
loadusr -W lcec_conf ./ethercat-conf.xml
Please Log in or Create an account to join the conversation.
- Evgeny
- Offline
- New Member
-
- Posts: 14
- Thank you received: 3
Hi, I can't register in WeChat, I can't verify my account in my countryI think I can help you. You can add me on WeChat: 304394405. I will use AnyDesk to assist you remotely.

Is it possible to use another method of communication? Telegram?
its not finding your xml file, try
loadusr -W lcec_conf ./ethercat-conf.xml
loadusr, command not found

Please Log in or Create an account to join the conversation.
- tommylight
-
 Topic Author
Topic Author
- Offline
- Moderator
-

- Posts: 21741
- Thank you received: 7430
That line has to be in the ha; file, not in a terminal.
loadusr, command not found
Please Log in or Create an account to join the conversation.
- onceloved
-
- Offline
- Premium Member
-
- Posts: 133
- Thank you received: 59
Please Log in or Create an account to join the conversation.
- Evgeny
- Offline
- New Member
-
- Posts: 14
- Thank you received: 3
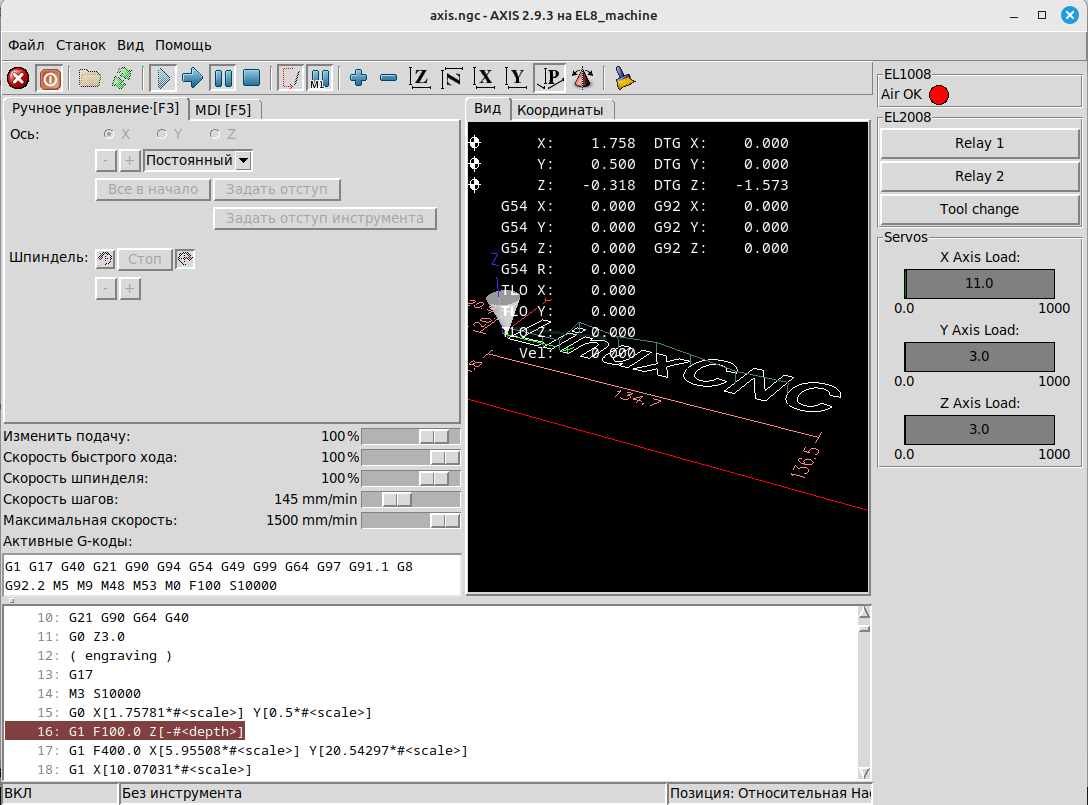
onceloved , Thank you very much for your help!

Please see my configuration, it starts and can control the motors! But I can't set up the home position detection with torque limitation
Attachments:
Please Log in or Create an account to join the conversation.
- Aciera
-

- Offline
- Administrator
-

- Posts: 4755
- Thank you received: 2135
[edit]
see this earlier post:
forum.linuxcnc.org/ethercat/51830-marco-...rcat?start=20#302562
[edit 2]
Note that the commands in the above linked post look wrong to me:
'sudo homecomp --install el8_homecomp.comp'
should actually be:
sudo halcompile --install el8_homecomp.compfor halcompile you need to install the 'linuxcnc-dev' package.
Please Log in or Create an account to join the conversation.