Problems with Lichuan Ethercat servo drive
- mra7768
- Offline
- New Member
-

Less
More
- Posts: 2
- Thank you received: 0
16 Jul 2025 13:11 #331897
by mra7768
Replied by mra7768 on topic Problems with Lichuan Ethercat servo drive
ซานโดร โพสต์=311023 รหัสผู้ใช้=27482เอาล่ะ นี่คือวิดีโอสั้นๆ ของเซอร์โวเหล่านี้ที่กำลังทำงาน
[/video]
[วิดีโอ]
Hi, I’d like to ask — which version of LinuxCNC and kernel are you currently running?
Please Log in or Create an account to join the conversation.
- MaxEkb77
-

- Offline
- Senior Member
-

Less
More
- Posts: 43
- Thank you received: 8
16 Jul 2025 13:55 - 16 Jul 2025 13:56 #331901
by MaxEkb77
Replied by MaxEkb77 on topic Problems with Lichuan Ethercat servo drive
")
Last edit: 16 Jul 2025 13:56 by MaxEkb77.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- oneKone
- Offline
- New Member
-
Less
More
- Posts: 5
- Thank you received: 0
18 Jul 2025 02:37 #331968
by oneKone
Replied by oneKone on topic Problems with Lichuan Ethercat servo drive
Hi all,
Thanks to this thread I have an axis moving!
Unfortunately I'm a complete noob when it comes to LinuxCNC and I've been overwhelmed when it comes to looking at other people's setups for how to add PID.
I don't suppose anyone has a simplified setup they're willing to share so I could suss out how it works?
Cheers
Thanks to this thread I have an axis moving!
Unfortunately I'm a complete noob when it comes to LinuxCNC and I've been overwhelmed when it comes to looking at other people's setups for how to add PID.
I don't suppose anyone has a simplified setup they're willing to share so I could suss out how it works?
Cheers
Please Log in or Create an account to join the conversation.
- Aleske
- Offline
- New Member
-
Less
More
- Posts: 3
- Thank you received: 0
03 Aug 2025 18:04 - 03 Aug 2025 18:15 #332741
by Aleske
Replied by Aleske on topic Problems with Lichuan Ethercat servo drive
Hello,I am in the process of getting 4x Lichuan LC10E drives running in CSP mode. I have also observed the behavior of a large following error in CSP mode, as user Sandro mentioned in his post on 14 Sep 2024. After many hours of trying to run CSP mode without encountering a large following error, I suspect that parameter 6068 "Position window time" is to blame. The default setting is 16 ms, which I interpret as the drive having 16 ms to reach the required position. Together with parameter 6067 "Position window", this allows for a large following error while the drive still believes it is operating correctly.
Unfortunately, I am unable to change these values. Initially, I tried reading them with:"<pdoEntry idx="6068" subIdx="00" bitLen="16" halPin="position-window-time" halType="u32"/>"
But this gives me a changing value in HAL show with strange behavior as I would expect a steady value of 16When I try to write to 6068, I get the following error:
Unfortunately, I am unable to change these values. Initially, I tried reading them with:"<pdoEntry idx="6068" subIdx="00" bitLen="16" halPin="position-window-time" halType="u32"/>"
But this gives me a changing value in HAL show with strange behavior as I would expect a steady value of 16When I try to write to 6068, I get the following error:
LCEC: Slave 0.3: Failed to execute SDO Download (0x6068:0x00, size 2, byte0=1, error -5, abort_code 0000000=)
Maybe this helps someone with more knowledge of EtherCAT achieve accurate positioning in CSP mode.Best regards,
Alex
Last edit: 03 Aug 2025 18:15 by Aleske.
Please Log in or Create an account to join the conversation.
- MaxEkb77
-
- Offline
- Senior Member
-
Less
More
- Posts: 43
- Thank you received: 8
04 Aug 2025 03:24 #332788
by MaxEkb77
Replied by MaxEkb77 on topic Problems with Lichuan Ethercat servo drive
Lichuan strange company i buy at aliexpress & receive a water damaged garbage and no one wants to be responsible for it.

Attachments:
Please Log in or Create an account to join the conversation.
- Philip Lydin
- Offline
- Senior Member
-
Less
More
- Posts: 43
- Thank you received: 6
05 Sep 2025 12:03 #334486
by Philip Lydin
Replied by Philip Lydin on topic Problems with Lichuan Ethercat servo drive
Is it possible to use the lichuan servos in csv mode with ethercat. i dont see any target speed the the variable pdo mapping. Can you use the fixed pdo mapping? Ive tried using index 1702(fixed) but im not able to enable the drive.
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-

Less
More
- Posts: 1317
- Thank you received: 453
05 Sep 2025 16:15 - 05 Sep 2025 16:28 #334502
by Hakan
Replied by Hakan on topic Problems with Lichuan Ethercat servo drive
Alex, try
nn being the number you want to set. There is also an upload. Sometimes it is better to do it outside of linuxcnc.
Check for SDO index:subindex using $ "ethercat -p 2 sdos"
Max, did you try to claim it with "AliExpress Seller Protection"?
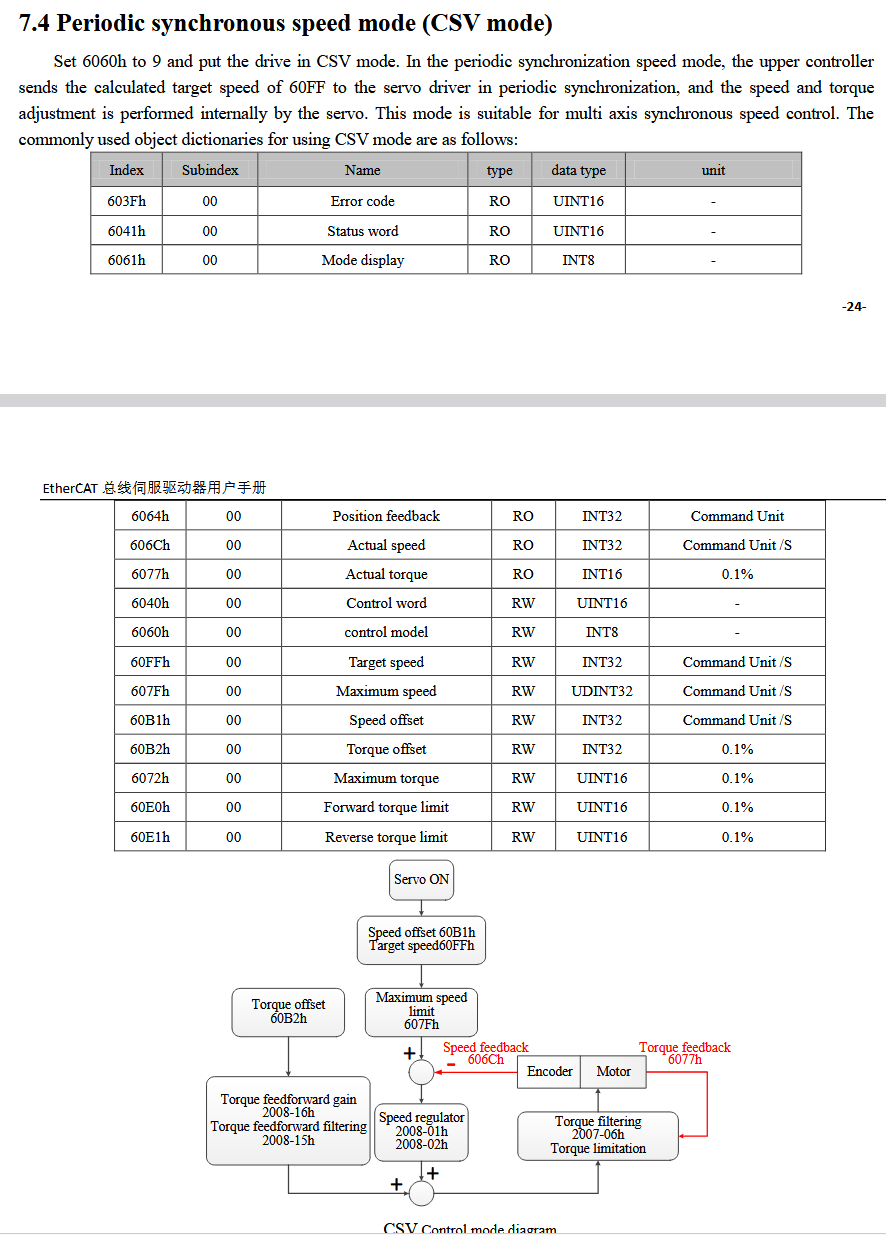
Philip, the manual says it can be done see snippet here
You should be able to add PDO 0x60ff to the SyncManager listing in the config, I think.
0x60ff is also in rxpdo 1703,1704,1705 so one of them should work. I guess.
$ ethercat -p 2 download 0x6068 0 nnnCheck for SDO index:subindex using $ "ethercat -p 2 sdos"
Max, did you try to claim it with "AliExpress Seller Protection"?
Philip, the manual says it can be done see snippet here
You should be able to add PDO 0x60ff to the SyncManager listing in the config, I think.
0x60ff is also in rxpdo 1703,1704,1705 so one of them should work. I guess.
Attachments:
Last edit: 05 Sep 2025 16:28 by Hakan.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- Sandro
- Offline
- Senior Member
-
Less
More
- Posts: 77
- Thank you received: 37
06 Sep 2025 07:25 #334534
by Sandro
Replied by Sandro on topic Problems with Lichuan Ethercat servo drive
Check my comment on page 9 for a csv config.
The following user(s) said Thank You: Philip Lydin
Please Log in or Create an account to join the conversation.
- MaxEkb77
-
- Offline
- Senior Member
-
Less
More
- Posts: 43
- Thank you received: 8
06 Sep 2025 18:14 #334557
by MaxEkb77
Replied by MaxEkb77 on topic Problems with Lichuan Ethercat servo drive
Yes shure.
I try to run servo in csp, i see one big problem - moror jumping on re-enable.
I try to dual ethercat-stepper, lol ok all enabled first motor running good - when i try to rotate shaft motor not showing feedback. second axis showing normal. first axis good run - second axis max spedd 500rpm if more motor jumping.
I try to run servo in csp, i see one big problem - moror jumping on re-enable.
I try to dual ethercat-stepper, lol ok all enabled first motor running good - when i try to rotate shaft motor not showing feedback. second axis showing normal. first axis good run - second axis max spedd 500rpm if more motor jumping.
Please Log in or Create an account to join the conversation.
- Philip Lydin
- Offline
- Senior Member
-
Less
More
- Posts: 43
- Thank you received: 6
07 Sep 2025 09:35 #334579
by Philip Lydin
Replied by Philip Lydin on topic Problems with Lichuan Ethercat servo drive
Has anyone been able to connect the drives to their tuning software. Maybe its because im on windows 11.
Please Log in or Create an account to join the conversation.
Time to create page: 0.487 seconds