AX58100
- COFHAL
- Offline
- Platinum Member
-

- Posts: 454
- Thank you received: 60
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
- Posts: 1317
- Thank you received: 453
Starting in eeprom_generator. Then for lcec in ethercat-conf.xml you can select the datatype of the created hal pin.
I don't think every combination is possible or makes sense, but to go from ethercat u32 to hal bit should work. For example.
Regarding the Analog voltage output - yes that was the reason to chose that pin - it is DAC capable.
The STM32 is really picky which pin one selects, they all have special functions and are not interchangeable at all.
Please Log in or Create an account to join the conversation.
- SOLD
- Offline
- Premium Member
-

- Posts: 122
- Thank you received: 13
This problem is fixed directly in ethercat-conf.xml using the original eeprom.I have been playing with the inputs and outputs of the card and I realized that these are of type u32 and in order to be used in LCN they must be converted to BITs with the conv_u32_bit component, this is because some pins that LCN automatically creates are of type bit, such as joint.N.amp-fault.in, iocontrol.o.emc.enable-in, or any other pin that has been declared as type bit.
<pdo idx="1a01">
<pdoEntry idx="6001" subIdx="01" bitLen="1" halPin="in1" halType="bit"/>
<pdoEntry idx="6001" subIdx="02" bitLen="1" halPin="in2" halType="bit"/>
<pdoEntry idx="6001" subIdx="03" bitLen="1" halPin="in3" halType="bit"/>
<pdoEntry idx="6001" subIdx="04" bitLen="1" halPin="in4" halType="bit"/>
<pdoEntry idx="6001" subIdx="05" bitLen="1" halPin="in5" halType="bit"/>
<pdoEntry idx="6001" subIdx="06" bitLen="1" halPin="in6" halType="bit"/>
<pdoEntry idx="6001" subIdx="07" bitLen="1" halPin="in7" halType="bit"/>
<pdoEntry idx="6001" subIdx="08" bitLen="1" halPin="in8" halType="bit"/>
</pdo>Please Log in or Create an account to join the conversation.
- SOLD
- Offline
- Premium Member
-
- Posts: 122
- Thank you received: 13
Thanks for the guide.ฮาคานโพสต์=316122 userid=22448ขอแสดงความยินดีด้วย โปรแกรมดีบักเกอร์ช่วยได้มากในการแก้ปัญหาบางอย่าง
ดังที่คุณทราบ ตัวแปรจะอัปเดตเมื่อโปรแกรมหยุดชั่วคราวหรือกำลังดำเนินการ
Next step, I might change the name of pin in u32 index-status; in metalmusings_encoder.comp to match the name of pdo, as I have confused it, and might need to change the data type of one of the parts to match.
Then reconnect the hal.
As I understand it,
when "Obj.IndexStatus" is sent to "pin in u32 index-status" in metalmusings_encoder,
it causes "pin io bit index-c-enable", which is equivalent to the original index-enable, to change the state to 1.
When index-c-enable is triggered, "pin out u32 index-latch-enable" will return to "Obj.IndexLatchEnable" to reset encCnt to 0, waiting to be 1 in the next round.
Please Log in or Create an account to join the conversation.
- SOLD
- Offline
- Premium Member
-
- Posts: 122
- Thank you received: 13
I tried to let Ai create a sample code according to my needs. It came out as follows. Of course, it still doesn't work. And the Obj variable that can't handle it. I don't have the knowledge to create a new program.
#include "OrientationHandler.h"
#include <Arduino.h>
#include "MyEncoder.h"
extern HardwareSerial Serial1;
extern MyEncoder Encoder1;
extern double spindleTargetPos; // ตัวแปรใหม่ที่ใช้เก็บตำแหน่งเป้าหมายสำหรับสปินเดิล
extern const byte DAC1_pin; // ขาสำหรับเชื่อมต่อสัญญาณอนาล็อก (0-10V)
extern _Objects Obj;
// ฟังก์ชันคำนวณทิศทางที่สั้นที่สุดในการหมุน
int calculateShortestAngle(int currentAngle, int targetAngle)
{
// ทำให้มุมทั้งหมดอยู่ในช่วง 0-360 องศา
currentAngle = currentAngle % 360;
targetAngle = targetAngle % 360;
// คำนวณความแตกต่างระหว่างมุม
int deltaAngle = targetAngle - currentAngle;
// ถ้าความแตกต่างมากกว่า 180 องศา ให้เลือกหมุนทางที่สั้นที่สุด
if (deltaAngle > 180)
deltaAngle -= 360;
else if (deltaAngle < -180)
deltaAngle += 360;
return deltaAngle; // ผลลัพธ์เป็นมุมที่ใกล้ที่สุดในการหมุน
}
// ฟังก์ชันสำหรับการหมุนสปินเดิลไปยังมุมที่กำหนด
void spindleOrientation(int targetAngle)
{
Serial1.println("คำสั่ง M19 ได้รับแล้ว กำลังหมุนสปินเดิลไปยังมุมเป้าหมาย...");
int currentAngle = Encoder1.currentPos(); // อ่านมุมปัจจุบันของสปินเดิล
int deltaAngle = calculateShortestAngle(currentAngle, targetAngle); // คำนวณมุมที่ใกล้ที่สุดที่ควรหมุน
Serial1.print("มุมที่ใกล้ที่สุด: ");
Serial1.println(deltaAngle);
// ถ้ามุมที่ต้องการคือ 0 หรือใกล้เคียง (ไม่ต้องหมุน)
if (fabs(deltaAngle) <= 0.01)
{
Serial1.println("ตำแหน่งปัจจุบันตรงกับตำแหน่งที่ต้องการ ไม่ต้องหมุน");
analogWrite(DAC1_pin, 0); // หยุดการหมุน
Obj.SpindleStatus = 1; // หมายเลข 1 สำหรับสำเร็จ
return; // ออกจากฟังก์ชัน
}
// คำนวณค่าอนาล็อกเพื่อควบคุมแรงดัน 0-10V (ใช้ map แปลงจากมุมที่ต้องหมุนเป็นค่าที่ใช้กับ analogWrite)
int analogValue = map(abs(deltaAngle), 0, 360, 0, 255);
if (analogValue > 255) analogValue = 255; // ตรวจสอบให้ค่าไม่เกิน 255
// กำหนดทิศทางการหมุนและควบคุมมอเตอร์
if (deltaAngle > 0) // หมุนไปทางขวา (clockwise)
{
analogWrite(DAC1_pin, analogValue);
Serial1.println("หมุนไปทางขวา (clockwise)");
}
else if (deltaAngle < 0) // หมุนไปทางซ้าย (counterclockwise)
{
analogWrite(DAC1_pin, analogValue);
Serial1.println("หมุนไปทางซ้าย (counterclockwise)");
}
// ตั้งเวลาหมุนสูงสุด (timeout) เช่น 5 วินาที
unsigned long startTime = millis();
unsigned long timeout = 5000; // เวลา 5 วินาที
// รอจนกว่าสปินเดิลจะถึงตำแหน่งเป้าหมาย หรือจนถึงเวลาหมด
while (fabs(Encoder1.currentPos() - targetAngle) > 0.01)
{
// ตรวจจับ rising edge ของสัญญาณ encoder index pulse เพื่อยืนยันการหมุนถึงตำแหน่งศูนย์
if (Encoder1.indexHappened())
{
Serial1.println("ตรวจจับ index pulse แล้ว.");
}
// ลดความเร็วเมื่อเข้าใกล้ตำแหน่งเป้าหมาย
if (fabs(Encoder1.currentPos() - targetAngle) < 5.0)
{
Serial1.println("ใกล้ถึงตำแหน่งเป้าหมาย ลดความเร็วลง...");
analogValue = map(abs(deltaAngle), 0, 360, 0, 100); // ลดค่าควบคุมแรงดันเพื่อหมุนช้าลง
analogWrite(DAC1_pin, analogValue);
}
// อัพเดตการทำงานของมอเตอร์
updateStepperGenerators();
// ตรวจสอบเวลา timeout
if (millis() - startTime > timeout)
{
Serial1.println("เวลาหมุนหมดแล้ว, ไม่สามารถหาตำแหน่งได้!");
analogWrite(DAC1_pin, 0); // หยุดการหมุน
// ส่งสถานะกลับไปยัง Master ว่าการหมุนไม่สำเร็จ
Obj.SpindleStatus = 2; // หมายเลข 2 สำหรับ Timeout
return; // ออกจากฟังก์ชัน
}
}
// เมื่อถึงตำแหน่งเป้าหมาย, หยุดจ่ายไฟ (หรือปรับค่าผลลัพธ์เป็น 0)
analogWrite(DAC1_pin, 0); // หยุดการหมุนโดยการส่งค่าแรงดัน 0
// ส่งสถานะกลับไปยัง Master ว่าการหมุนสำเร็จ
Obj.SpindleStatus = 1; // หมายเลข 1 สำหรับสำเร็จ
Serial1.println("สปินเดิลได้ถูกออเรียนเทชันไปยังมุมที่กำหนดแล้ว.");
}
Functions to be included
- Use DAC1 as analog +-10V to control servo spindle
- Receive M19 command and degree variables such as R0 R45 R90 from Hal " net spindle_orientation => ecat.0.command "
- Check if the current position is the same as the desired target
- Calculate the nearest rotation direction
- Add edge, near function
- Timer to turn off DAC if no target is found
- Confirm operation or error back to Master
Other if necessary
Please Log in or Create an account to join the conversation.
- COFHAL
- Offline
- Platinum Member
-
- Posts: 454
- Thank you received: 60
Please Log in or Create an account to join the conversation.
- SOLD
- Offline
- Premium Member
-
- Posts: 122
- Thank you received: 13
???yes, work.

Please Log in or Create an account to join the conversation.
- COFHAL
- Offline
- Platinum Member
-
- Posts: 454
- Thank you received: 60
Please Log in or Create an account to join the conversation.
- COFHAL
- Offline
- Platinum Member
-
- Posts: 454
- Thank you received: 60
Please Log in or Create an account to join the conversation.
- Hakan
- Offline
- Platinum Member
-
- Posts: 1317
- Thank you received: 453
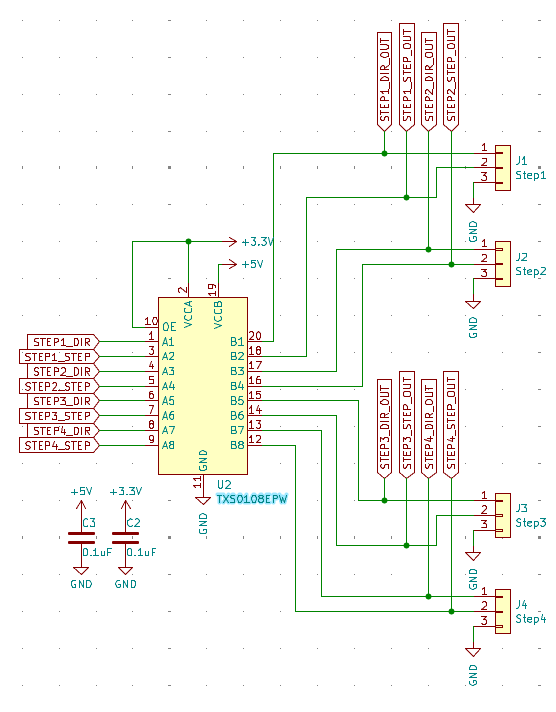
and the Kicad layout of the connector on the board
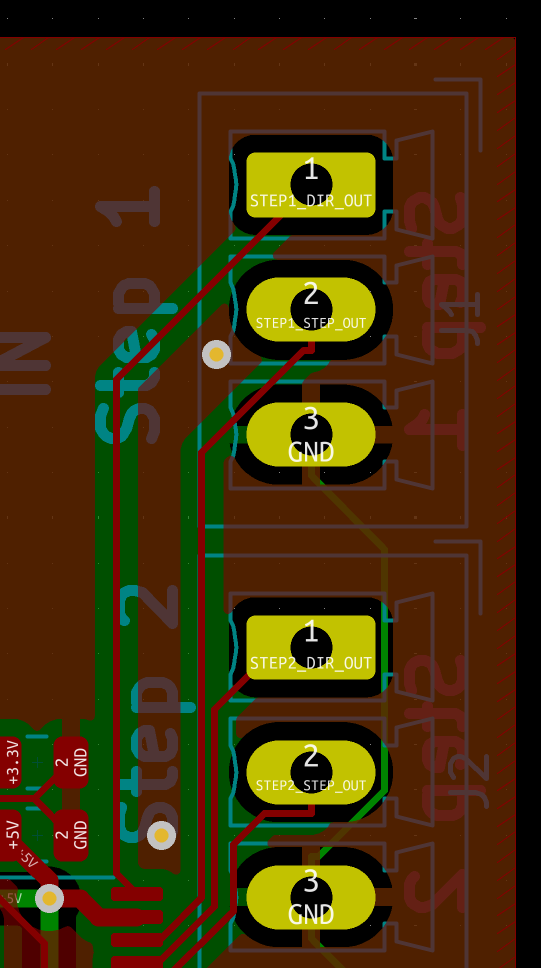
Common is negative, GND.
Attachments:
Please Log in or Create an account to join the conversation.