Search Results (Searched for: 7i76e)
- DerKlotz
- DerKlotz
09 Mar 2026 10:12
Replied by DerKlotz on topic Verdrahtung Leadshine DM856 Ena+ und - bei Mesa 7i76e
Verdrahtung Leadshine DM856 Ena+ und - bei Mesa 7i76e
Category: Deutsch
- Muecke

08 Mar 2026 18:38
Replied by Muecke on topic Verdrahtung Leadshine DM856 Ena+ und - bei Mesa 7i76e
Verdrahtung Leadshine DM856 Ena+ und - bei Mesa 7i76e
Category: Deutsch
- tommylight

07 Mar 2026 18:08
- georgio
- georgio
07 Mar 2026 17:04
- DerKlotz
- DerKlotz
07 Mar 2026 11:50
Replied by DerKlotz on topic Wiring Leadshine DM856 Ena+ and ENA- -> Mesa 7i76e
Wiring Leadshine DM856 Ena+ and ENA- -> Mesa 7i76e
Category: Milling Machines
- tommylight
07 Mar 2026 00:13
Replied by tommylight on topic help - mesa 7i76eu - pin does not exist
help - mesa 7i76eu - pin does not exist
Category: Driver Boards
- josh1e
- josh1e
06 Mar 2026 23:48
help - mesa 7i76eu - pin does not exist was created by josh1e
help - mesa 7i76eu - pin does not exist
Category: Driver Boards
- PCW

06 Mar 2026 14:36
Replied by PCW on topic Wiring Leadshine DM856 Ena+ and ENA- -> Mesa 7i76e
Wiring Leadshine DM856 Ena+ and ENA- -> Mesa 7i76e
Category: Milling Machines
- DerKlotz
- DerKlotz
06 Mar 2026 08:35 - 06 Mar 2026 08:36
Wiring Leadshine DM856 Ena+ and ENA- -> Mesa 7i76e was created by DerKlotz
Wiring Leadshine DM856 Ena+ and ENA- -> Mesa 7i76e
Category: Milling Machines
- DerKlotz
- DerKlotz
05 Mar 2026 09:52 - 05 Mar 2026 09:58
Verdrahtung Leadshine DM856 Ena+ und - bei Mesa 7i76e was created by DerKlotz
Verdrahtung Leadshine DM856 Ena+ und - bei Mesa 7i76e
Category: Deutsch
- Lcvette

04 Mar 2026 15:45
- DerKlotz
- DerKlotz
04 Mar 2026 09:03 - 04 Mar 2026 10:52
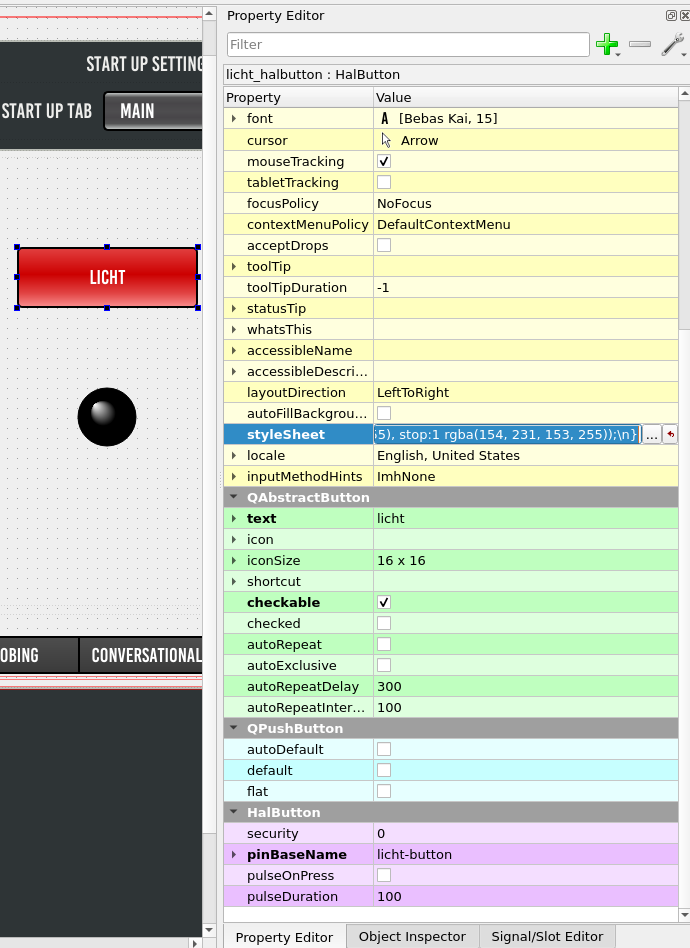
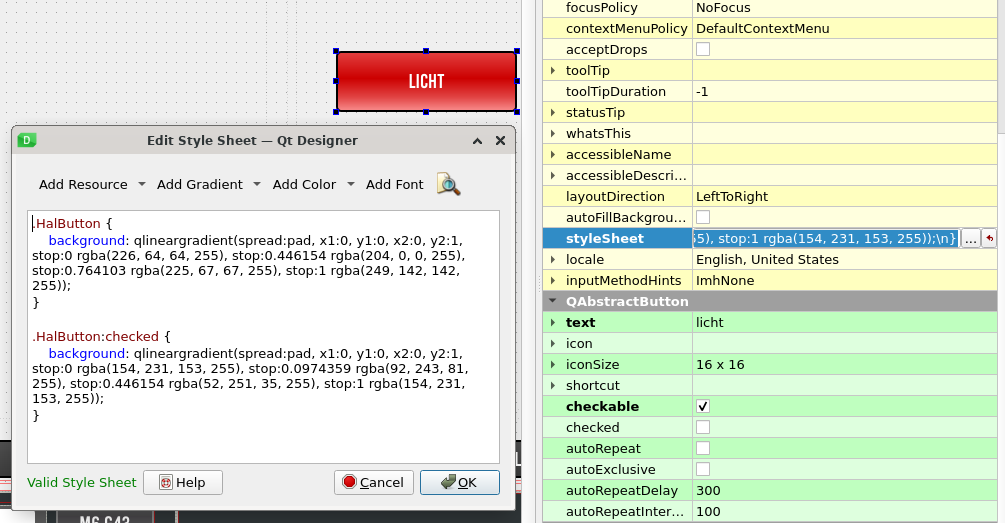
Replied by DerKlotz on topic Add Buttons in Probe Basic
Add Buttons in Probe Basic
Category: QtPyVCP
- Todd Zuercher

25 Feb 2026 11:41
- Todd Zuercher
25 Feb 2026 00:00
- PCW
24 Feb 2026 23:08
Time to create page: 1.357 seconds