Search Results (Searched for: 7i76e)
- RMJ fabrication
- RMJ fabrication
30 May 2026 22:43
Replied by RMJ fabrication on topic Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Category: Plasmac
- PCW

30 May 2026 21:57
- RMJ fabrication
- RMJ fabrication
30 May 2026 21:50
Replied by RMJ fabrication on topic Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Category: Plasmac
- RMJ fabrication
- RMJ fabrication
30 May 2026 21:22
Replied by RMJ fabrication on topic Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Category: Plasmac
- PCW
30 May 2026 20:37
- RMJ fabrication
- RMJ fabrication
30 May 2026 18:51
Replied by RMJ fabrication on topic Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Category: Plasmac
- RMJ fabrication
- RMJ fabrication
30 May 2026 18:32
Replied by RMJ fabrication on topic Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Category: Plasmac
- PCW
30 May 2026 14:45
- mgiaco
- mgiaco
30 May 2026 14:00
Replied by mgiaco on topic Mesa 7i76e pncconf open loop stepper leadshine
Mesa 7i76e pncconf open loop stepper leadshine
Category: HAL
- rodw

30 May 2026 10:27
- rodw
30 May 2026 10:23 - 30 May 2026 10:28
- RMJ fabrication
- RMJ fabrication
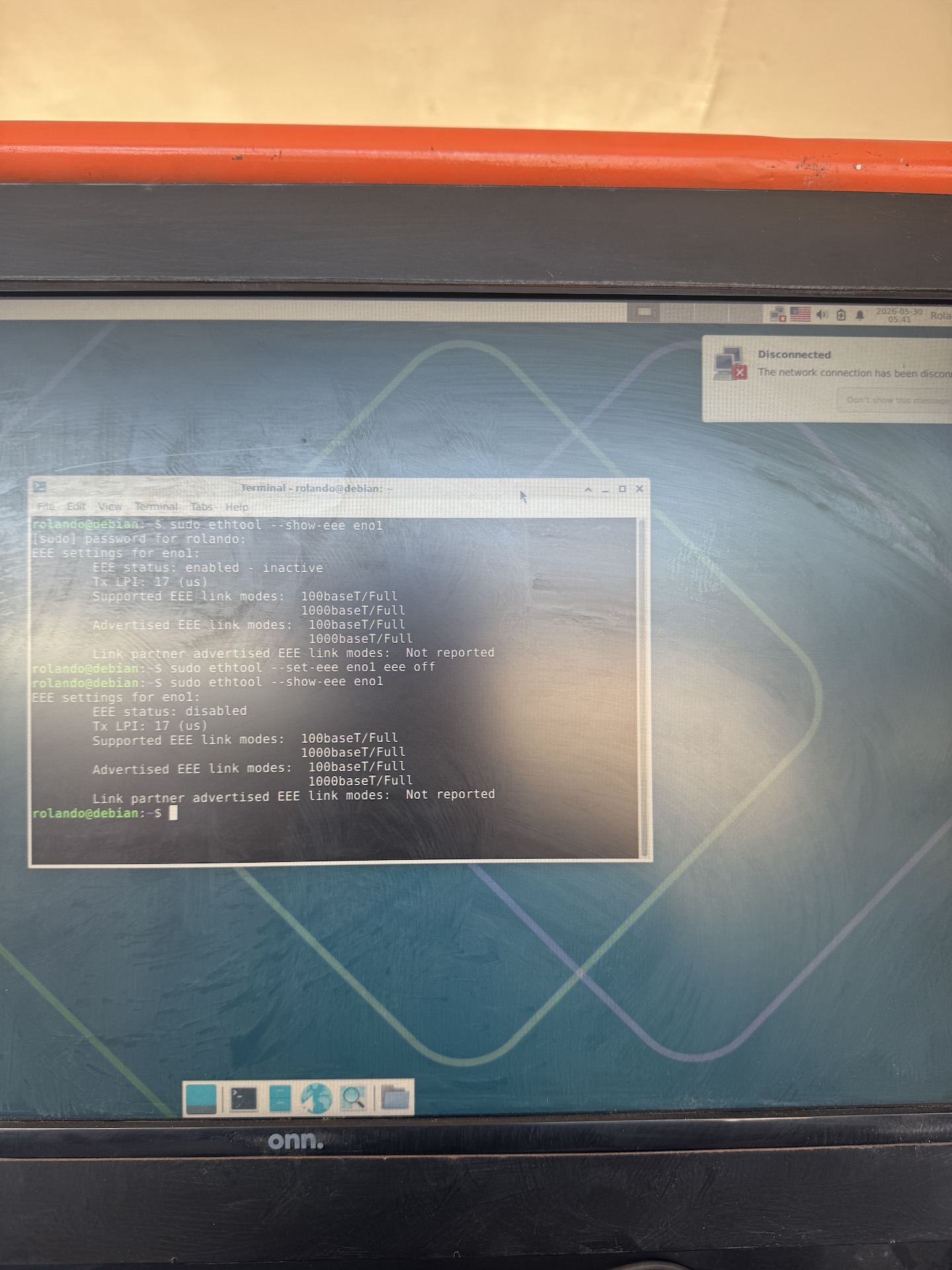
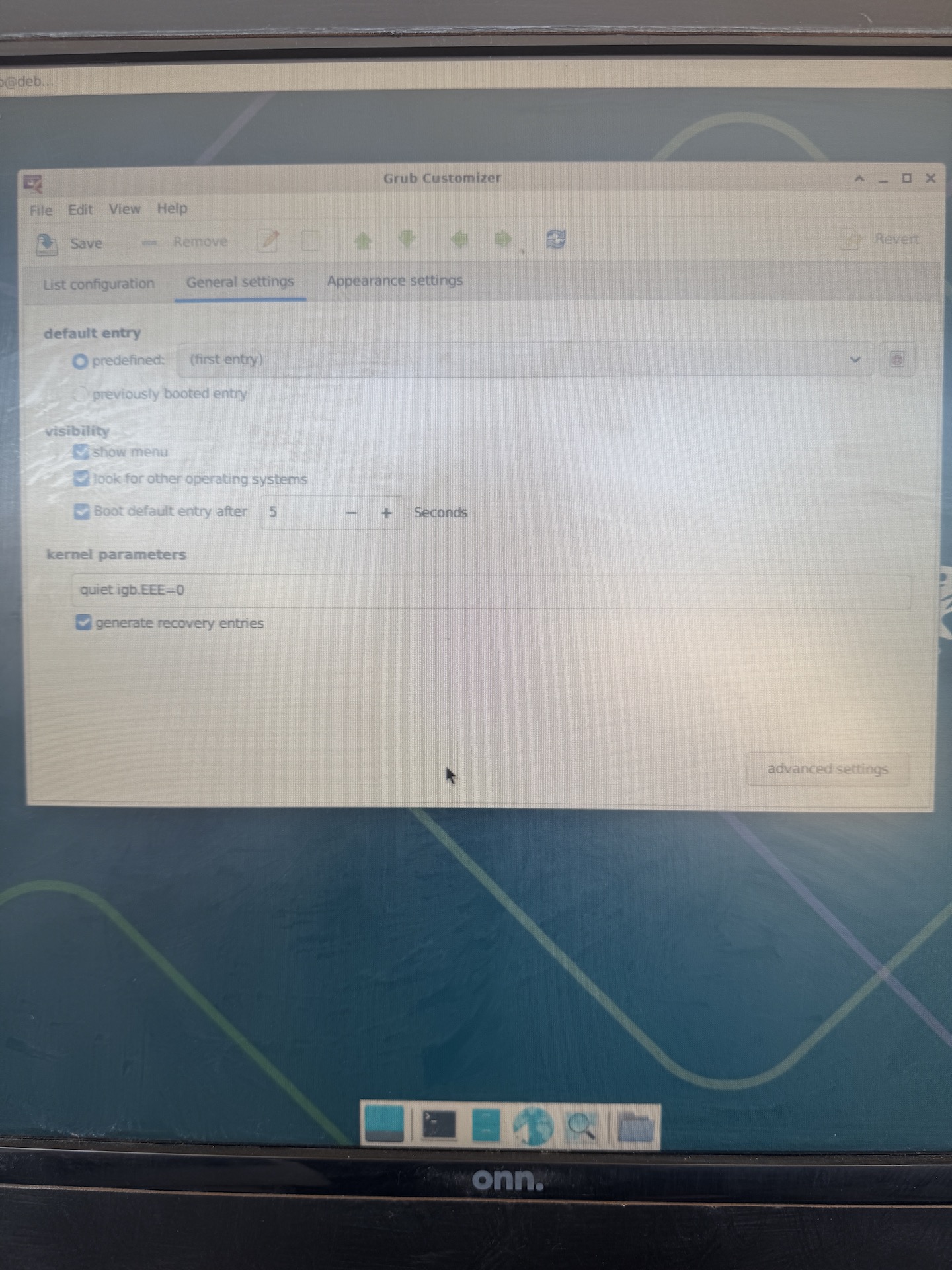
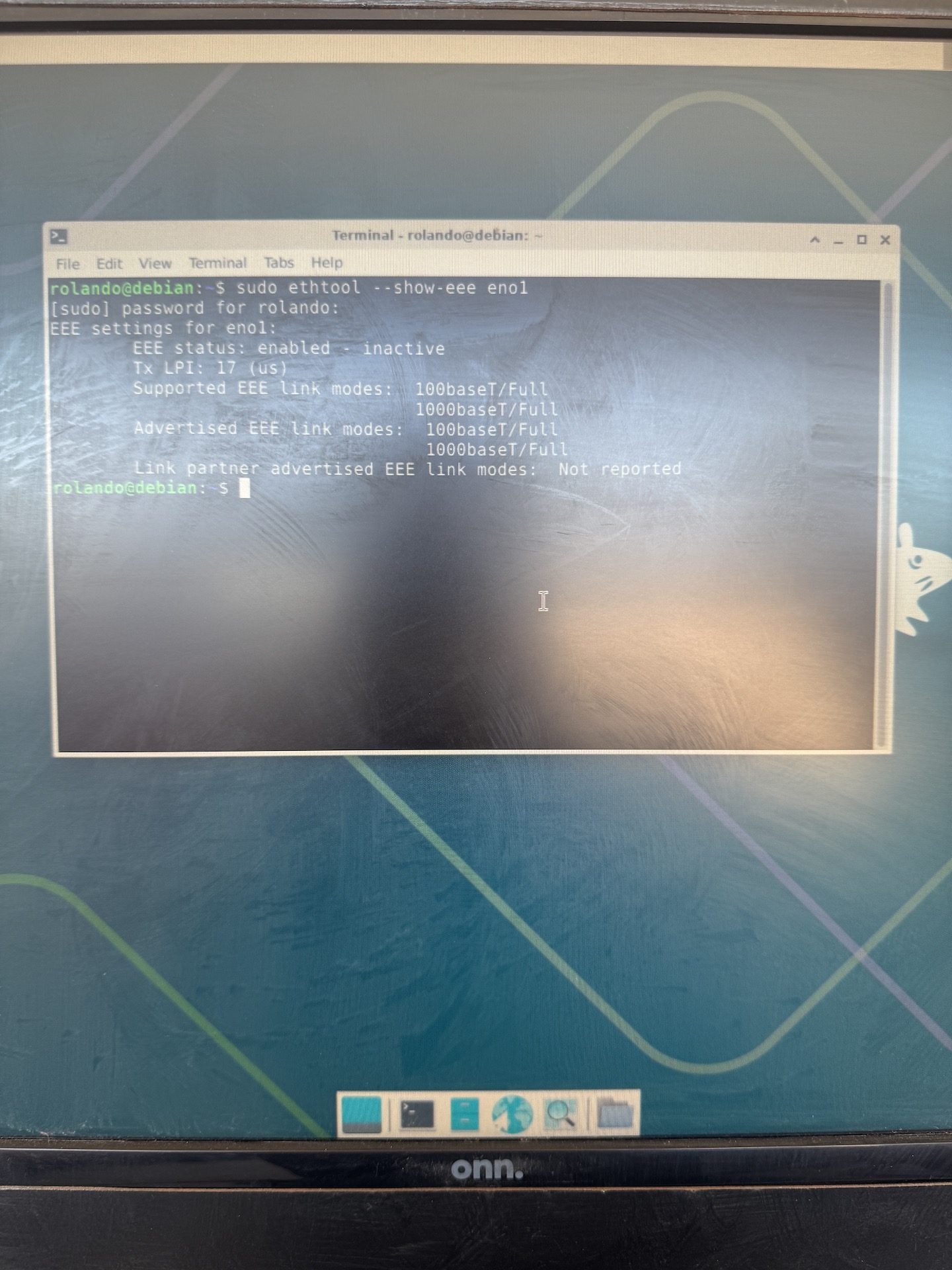
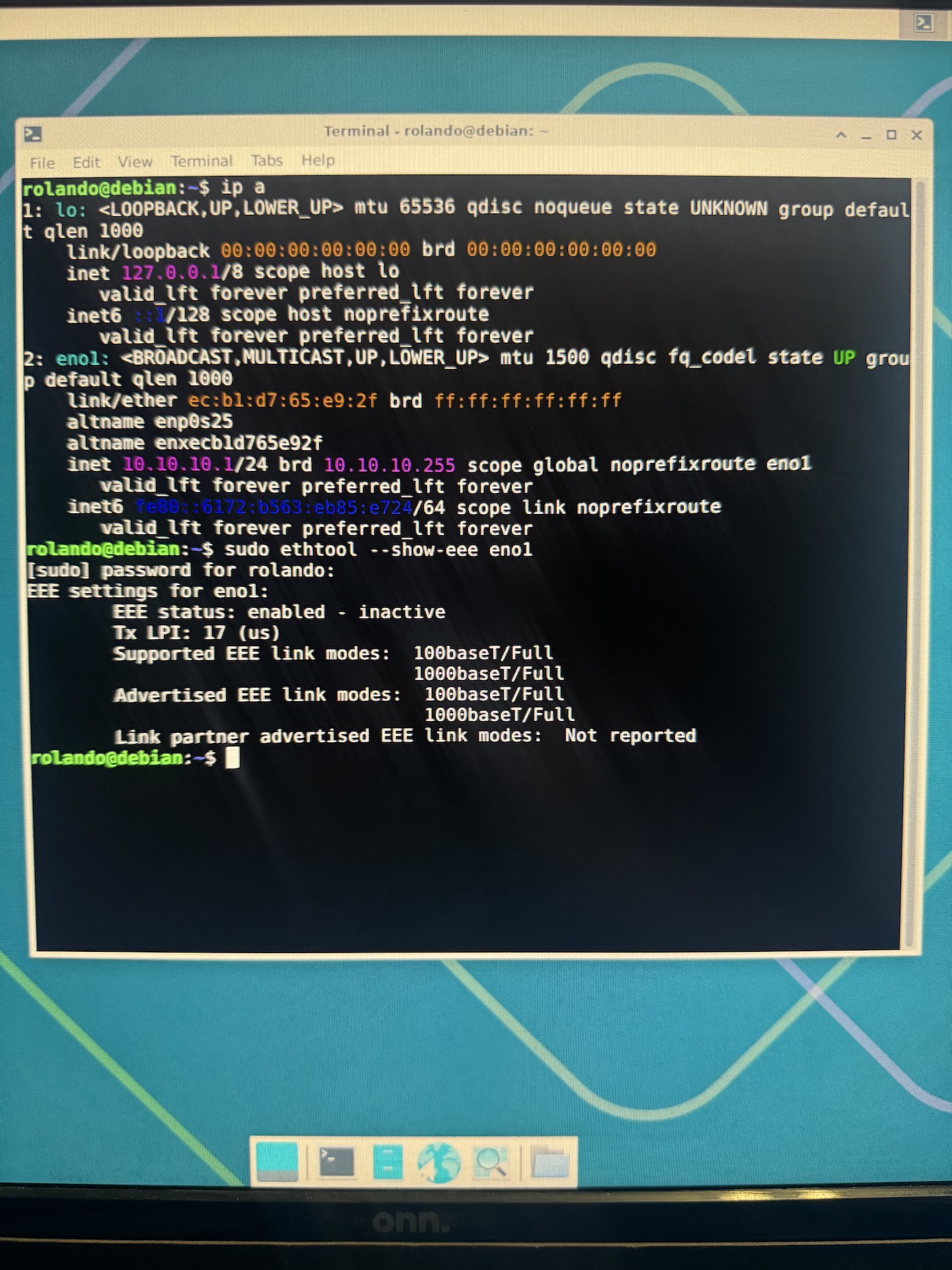
30 May 2026 05:50
Replied by RMJ fabrication on topic Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Category: Plasmac
- Asymmetrisch
- Asymmetrisch
30 May 2026 05:22
Replied by Asymmetrisch on topic TTL to differential converter (STEP / DIR / ENABLE)
TTL to differential converter (STEP / DIR / ENABLE)
Category: Computers and Hardware
- rodw
30 May 2026 05:16
- RMJ fabrication
- RMJ fabrication
30 May 2026 05:08
Replied by RMJ fabrication on topic Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Category: Plasmac
Time to create page: 1.113 seconds