Search Results (Searched for: )
- StoneB
- StoneB
13 Dec 2024 22:05
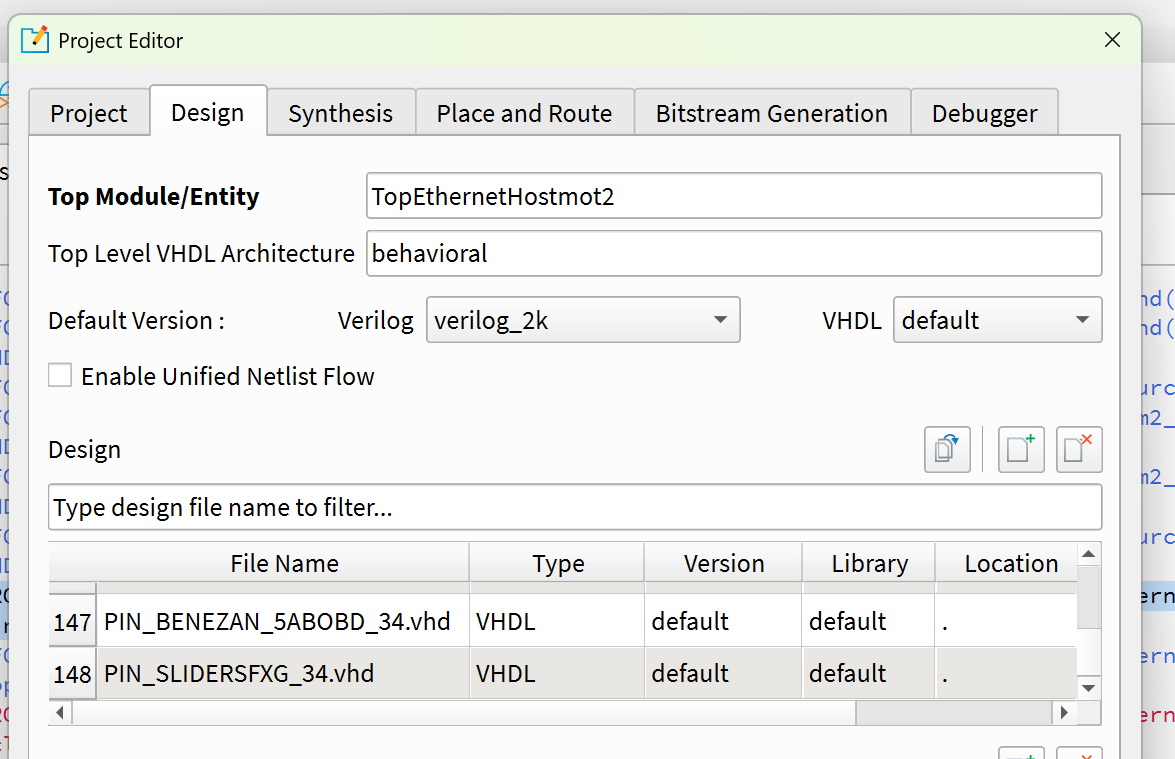
Replied by StoneB on topic Xilinx Setup to edit config for 7i92T
Xilinx Setup to edit config for 7i92T
Category: Driver Boards
- PCW

13 Dec 2024 21:15
Replied by PCW on topic Teknic Clearpath SDSK wiring to 7i96s
Teknic Clearpath SDSK wiring to 7i96s
Category: General LinuxCNC Questions
- PCW
13 Dec 2024 20:42
Replied by PCW on topic homing with Phase Z encoder on MESA 7i96s
homing with Phase Z encoder on MESA 7i96s
Category: Advanced Configuration
- JackRay
- JackRay
13 Dec 2024 20:34
Replied by JackRay on topic homing with Phase Z encoder on MESA 7i96s
homing with Phase Z encoder on MESA 7i96s
Category: Advanced Configuration
- PCW
13 Dec 2024 20:11
Replied by PCW on topic homing with Phase Z encoder on MESA 7i96s
homing with Phase Z encoder on MESA 7i96s
Category: Advanced Configuration
- Teknic_Servo
13 Dec 2024 20:07
Replied by Teknic_Servo on topic Teknic Clearpath SDSK wiring to 7i96s
Teknic Clearpath SDSK wiring to 7i96s
Category: General LinuxCNC Questions
- JackRay
- JackRay
13 Dec 2024 20:05
homing with Phase Z encoder on MESA 7i96s was created by JackRay
homing with Phase Z encoder on MESA 7i96s
Category: Advanced Configuration
- PCW
13 Dec 2024 17:53
Replied by PCW on topic Xilinx Setup to edit config for 7i92T
Xilinx Setup to edit config for 7i92T
Category: Driver Boards
- Blume
- Blume
13 Dec 2024 17:40
- greg23_78
- greg23_78
13 Dec 2024 17:14
Replied by greg23_78 on topic Solution fo "hm2 error finishing read" with no good PC
Solution fo "hm2 error finishing read" with no good PC
Category: Computers and Hardware
") .
.- StoneB
- StoneB
13 Dec 2024 17:10
Replied by StoneB on topic Xilinx Setup to edit config for 7i92T
Xilinx Setup to edit config for 7i92T
Category: Driver Boards
- Lcvette

13 Dec 2024 16:56 - 13 Dec 2024 16:57
- tommylight

13 Dec 2024 16:36
Replied by tommylight on topic Servo tuning for an axis that behaves different in one direction versus the othe
Servo tuning for an axis that behaves different in one direction versus the othe
Category: CNC Machines
Time to create page: 4.397 seconds