Search Results (Searched for: )
- PCW

17 Mar 2025 00:46
Replied by PCW on topic Mesa 7i95t rs485 spindle
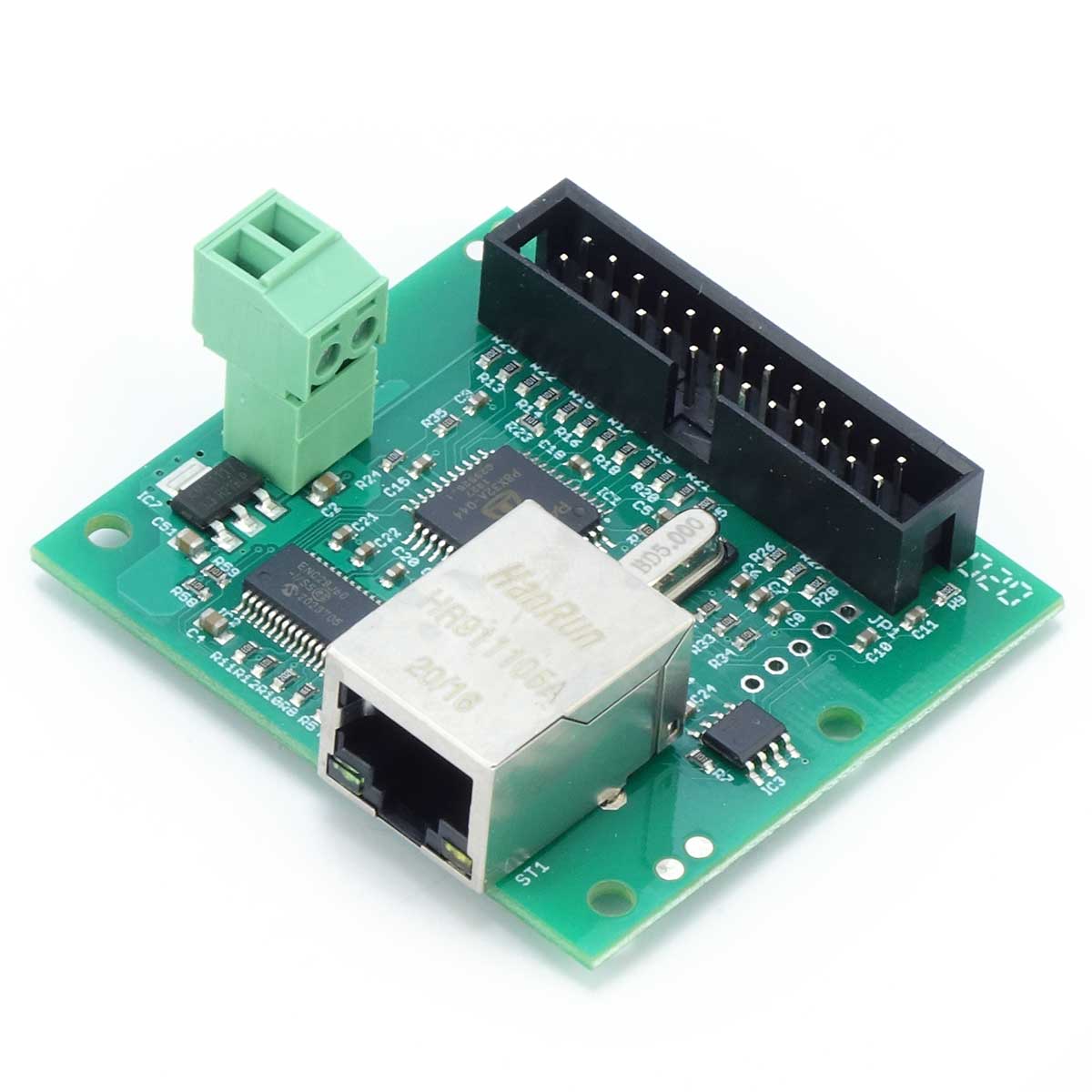
Mesa 7i95t rs485 spindle
Category: Basic Configuration
- royka
- royka
17 Mar 2025 00:20 - 17 Mar 2025 00:25
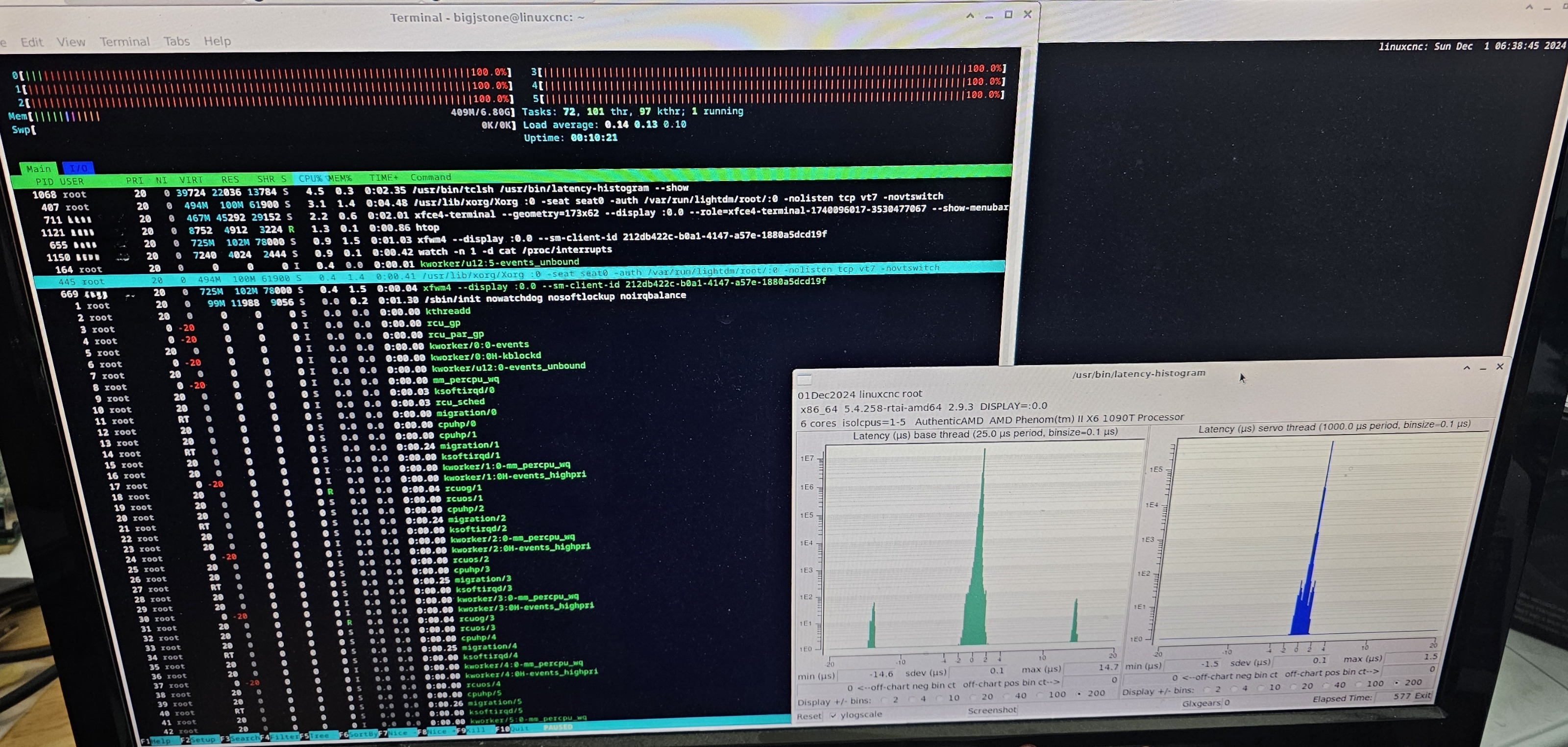
Replied by royka on topic Can't eek out that last bit of jitter
Can't eek out that last bit of jitter
Category: General LinuxCNC Questions
- spumco
- spumco
16 Mar 2025 23:54
Replied by spumco on topic caxis.comp with stepper motor / gear connection to spindle
caxis.comp with stepper motor / gear connection to spindle
Category: HAL
- Sternfox
- Sternfox
16 Mar 2025 23:51
Mesa 7i95t rs485 spindle was created by Sternfox
Mesa 7i95t rs485 spindle
Category: Basic Configuration
- PCW
16 Mar 2025 23:44 - 17 Mar 2025 00:32
Replied by PCW on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
- vre
- vre
16 Mar 2025 23:30
Replied by vre on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
- webbyguy
- webbyguy
16 Mar 2025 23:15 - 16 Mar 2025 23:20
Replied by webbyguy on topic Can't eek out that last bit of jitter
Can't eek out that last bit of jitter
Category: General LinuxCNC Questions
- webbyguy
- webbyguy
16 Mar 2025 22:59
Replied by webbyguy on topic Can't eek out that last bit of jitter
Can't eek out that last bit of jitter
Category: General LinuxCNC Questions
- jordi3sk97
- jordi3sk97
16 Mar 2025 21:52
- Simi02
- Simi02
16 Mar 2025 21:35
Replied by Simi02 on topic Problem with 6i25 + 7i77 PWM Pins
Problem with 6i25 + 7i77 PWM Pins
Category: PnCConf Wizard
- tommy
- tommy
16 Mar 2025 21:28 - 16 Mar 2025 21:29
Replied by tommy on topic STEPLEN STEPSPACE time for Bergerda AC servo driver
STEPLEN STEPSPACE time for Bergerda AC servo driver
Category: General LinuxCNC Questions

- scda

16 Mar 2025 21:08
Replied by scda on topic caxis.comp with stepper motor / gear connection to spindle
caxis.comp with stepper motor / gear connection to spindle
Category: HAL

- PCW
16 Mar 2025 20:28
Replied by PCW on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
- Aciera

16 Mar 2025 19:11
Replied by Aciera on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- vre
- vre
16 Mar 2025 19:11
Replied by vre on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
Time to create page: 0.752 seconds