Search Results (Searched for: )
- tommylight

14 Mar 2025 17:42
Replied by tommylight on topic An odd thing about jitter, and a question
An odd thing about jitter, and a question
Category: General LinuxCNC Questions
")
- PCW

14 Mar 2025 17:42 - 14 Mar 2025 20:10
Replied by PCW on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
- sajurcaju
- sajurcaju
14 Mar 2025 17:36
An odd thing about jitter, and a question was created by sajurcaju
An odd thing about jitter, and a question
Category: General LinuxCNC Questions
- vre
- vre
14 Mar 2025 17:33 - 14 Mar 2025 17:38
Replied by vre on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
- PCW
14 Mar 2025 17:10
Replied by PCW on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
- vre
- vre
14 Mar 2025 16:43 - 14 Mar 2025 16:52
Replied by vre on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
- PCW
14 Mar 2025 16:39 - 14 Mar 2025 16:42
Replied by PCW on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
- vre
- vre
14 Mar 2025 16:20 - 14 Mar 2025 16:25
Replied by vre on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
- royka
- royka
14 Mar 2025 16:10
- Grotius

14 Mar 2025 15:45
Replied by Grotius on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- RobotMatic

14 Mar 2025 15:04
- unknown
- unknown
14 Mar 2025 14:45
Replied by unknown on topic Funny message when reply to a topic
Funny message when reply to a topic
Category: Forum Questions
- PCW
14 Mar 2025 14:43
Replied by PCW on topic 7i95 randomly throws error with raspi b
7i95 randomly throws error with raspi b
Category: Driver Boards
- atrex77

14 Mar 2025 14:36
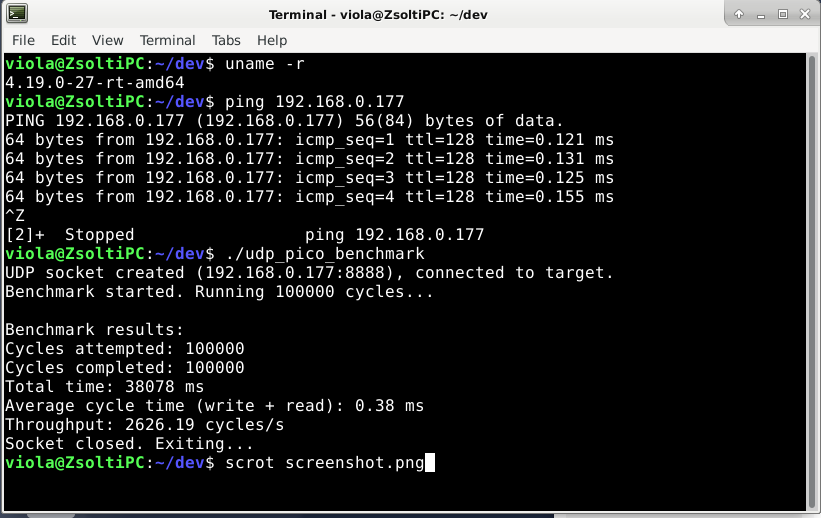
Replied by atrex77 on topic Developing a Raspberry Pi Pico-based I/O Board for LinuxCNC
Developing a Raspberry Pi Pico-based I/O Board for LinuxCNC
Category: General LinuxCNC Questions
- PCW
14 Mar 2025 14:23
Replied by PCW on topic Mesa modbus and pktUart
Mesa modbus and pktUart
Category: Other User Interfaces
Time to create page: 1.000 seconds