Search Results (Searched for: )
- Hakan
- Hakan
10 Mar 2025 14:23
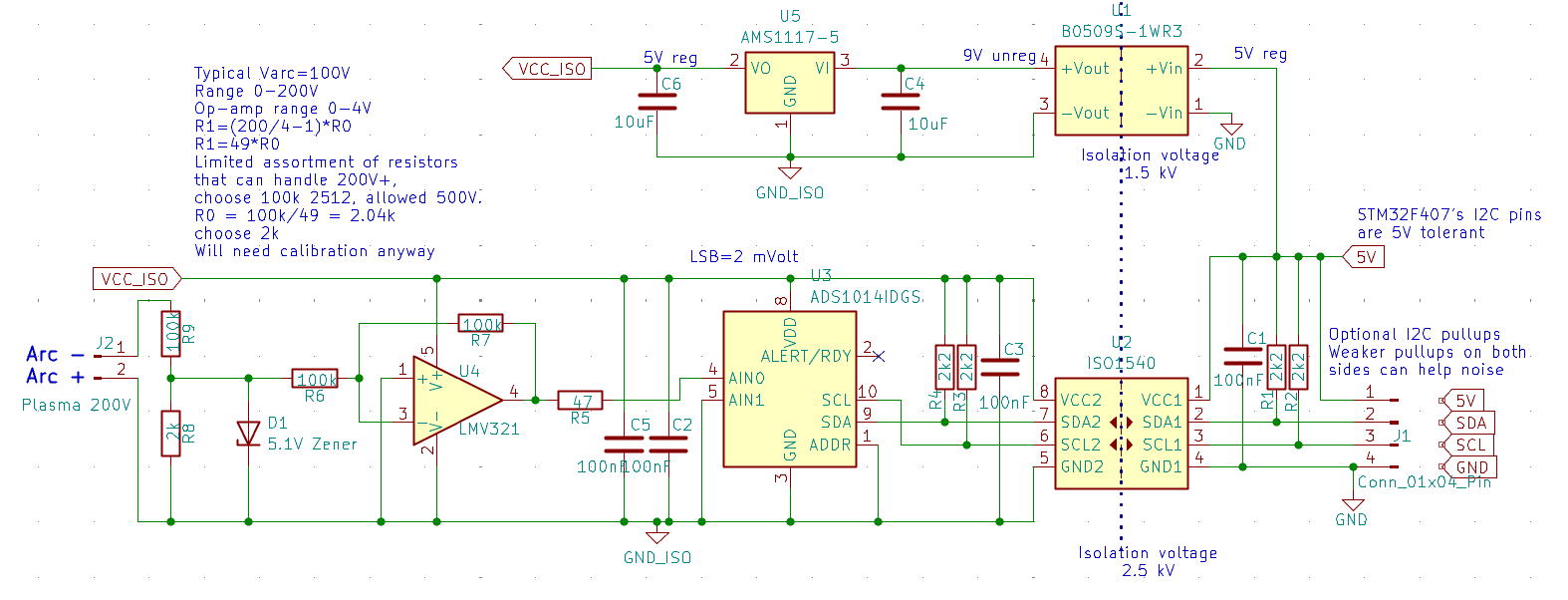
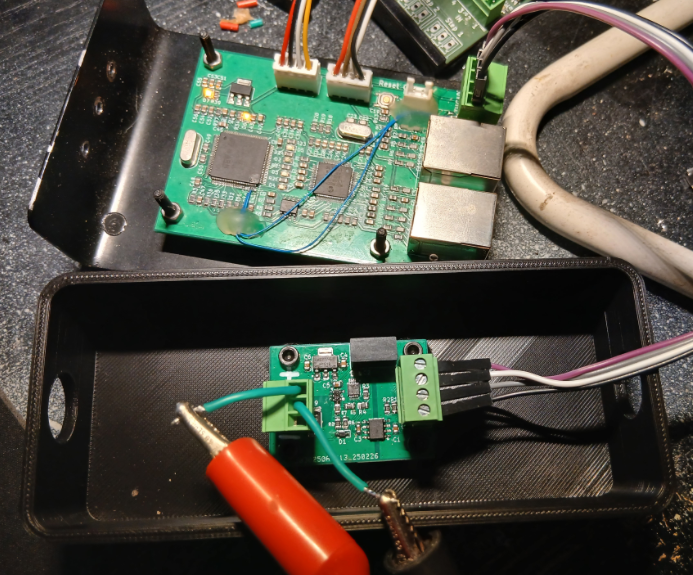
Replied by Hakan on topic EtherCAT plasma torch voltage reader
EtherCAT plasma torch voltage reader
Category: Show Your Stuff
- JTknives
10 Mar 2025 14:20
QTplasmaC upgrade now huge latency was created by JTknives
QTplasmaC upgrade now huge latency
Category: Computers and Hardware
- Todd Zuercher

10 Mar 2025 14:19
Replied by Todd Zuercher on topic halui toggle button
halui toggle button
Category: Basic Configuration
- emcPT

10 Mar 2025 14:10
Replied by emcPT on topic MBT -> GPT to reuse existing installation
MBT -> GPT to reuse existing installation
Category: Installing LinuxCNC
- Todd Zuercher
10 Mar 2025 13:36
Replied by Todd Zuercher on topic Delta VFD-B Modbus with QtDragon_hd
Delta VFD-B Modbus with QtDragon_hd
Category: General LinuxCNC Questions
- endian

10 Mar 2025 13:28
Replied by endian on topic EL6731 changes cyclically to INIT status
EL6731 changes cyclically to INIT status
Category: EtherCAT
- Grotius

10 Mar 2025 12:35
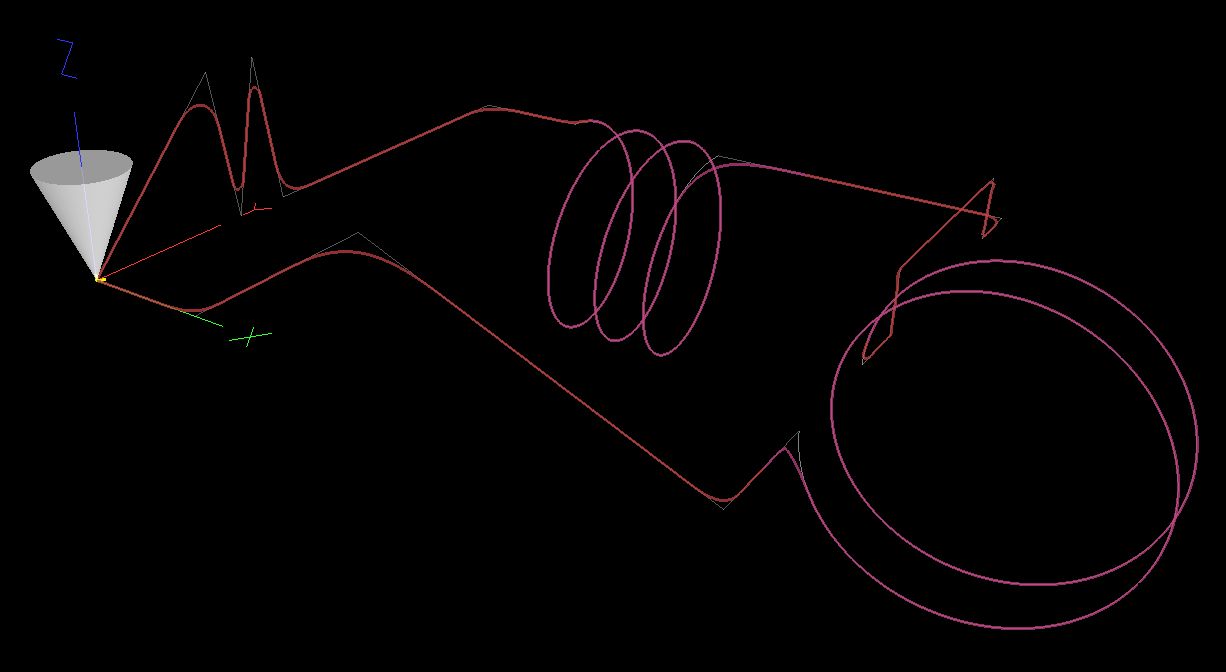
Replied by Grotius on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- tommylight

10 Mar 2025 11:46 - 10 Mar 2025 11:47
Replied by tommylight on topic MBT -> GPT to reuse existing installation
MBT -> GPT to reuse existing installation
Category: Installing LinuxCNC
- Lcvette

10 Mar 2025 11:05
Replied by Lcvette on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- emcPT
10 Mar 2025 10:59
Replied by emcPT on topic MBT -> GPT to reuse existing installation
MBT -> GPT to reuse existing installation
Category: Installing LinuxCNC
- tommylight
10 Mar 2025 10:48
Replied by tommylight on topic MBT -> GPT to reuse existing installation
MBT -> GPT to reuse existing installation
Category: Installing LinuxCNC
- fabi0696
- fabi0696
10 Mar 2025 10:39
Replied by fabi0696 on topic EL6731 changes cyclically to INIT status
EL6731 changes cyclically to INIT status
Category: EtherCAT
- Grotius
10 Mar 2025 10:19
Replied by Grotius on topic scurve trajectory planner
scurve trajectory planner
Category: General LinuxCNC Questions
- emcPT
10 Mar 2025 10:13
MBT -> GPT to reuse existing installation was created by emcPT
MBT -> GPT to reuse existing installation
Category: Installing LinuxCNC
- Masa
- Masa
10 Mar 2025 07:26
Time to create page: 0.788 seconds