Search Results (Searched for: )
- tftmarco0

16 Feb 2025 12:00
Replied by tftmarco0 on topic Tried every net solution for days to install linuxcnc
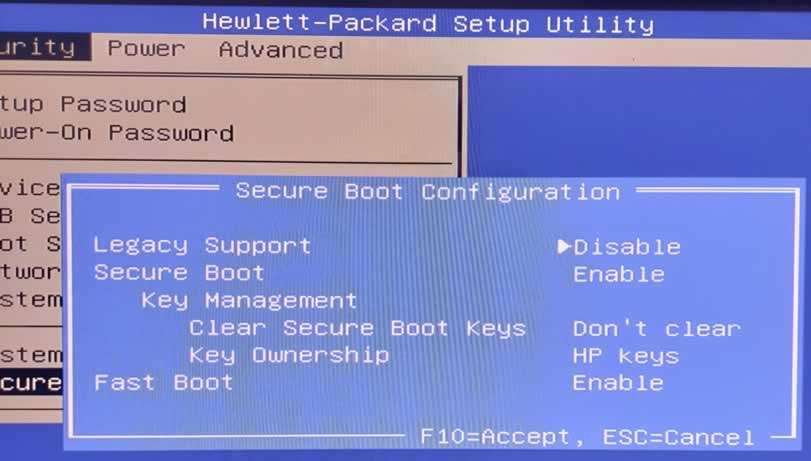
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- Hakan
- Hakan
16 Feb 2025 11:56 - 16 Feb 2025 11:57
Replied by Hakan on topic EtherCAT IO and frequency counter for plasma cutter
EtherCAT IO and frequency counter for plasma cutter
Category: Show Your Stuff
- aikiaviator
- aikiaviator
16 Feb 2025 11:53
Replied by aikiaviator on topic MESA 7i96S and Input config
MESA 7i96S and Input config
Category: Basic Configuration
- tftmarco0
16 Feb 2025 11:46
Replied by tftmarco0 on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- tftmarco0
16 Feb 2025 11:35
Replied by tftmarco0 on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- rodw

16 Feb 2025 11:31
Replied by rodw on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- tftmarco0
16 Feb 2025 11:22
Replied by tftmarco0 on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- Lcvette

16 Feb 2025 11:20
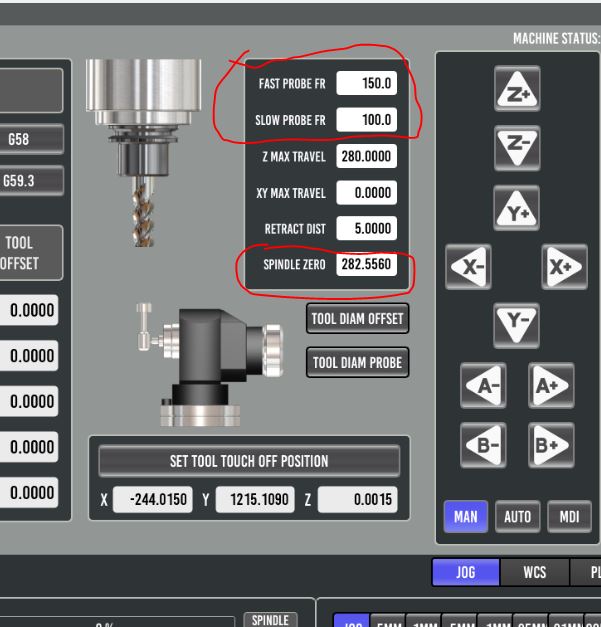
Replied by Lcvette on topic Losing some values after PB restart
Losing some values after PB restart
Category: QtPyVCP
- ytiuqibu
- ytiuqibu
16 Feb 2025 11:20
Manual homing does not move on any axis was created by ytiuqibu
Manual homing does not move on any axis
Category: General LinuxCNC Questions
- rodw
16 Feb 2025 11:20
Replied by rodw on topic EtherCAT IO and frequency counter for plasma cutter
EtherCAT IO and frequency counter for plasma cutter
Category: Show Your Stuff
- tftmarco0
16 Feb 2025 11:17
Replied by tftmarco0 on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- tftmarco0
16 Feb 2025 11:09
Replied by tftmarco0 on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- IB_CnC
- IB_CnC
16 Feb 2025 11:08
Replied by IB_CnC on topic Losing some values after PB restart
Losing some values after PB restart
Category: QtPyVCP
- rodw
16 Feb 2025 11:04
Replied by rodw on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
- unknown
- unknown
16 Feb 2025 10:59
Replied by unknown on topic Tried every net solution for days to install linuxcnc
Tried every net solution for days to install linuxcnc
Category: Installing LinuxCNC
Time to create page: 0.472 seconds