Search Results (Searched for: )
- baikal718
- baikal718
06 Feb 2025 21:58
Replied by baikal718 on topic NC height probe with NO touchplate in QTDragon?
NC height probe with NO touchplate in QTDragon?
Category: Basic Configuration
- JT

06 Feb 2025 21:52
- Wagon56
- Wagon56
06 Feb 2025 21:26
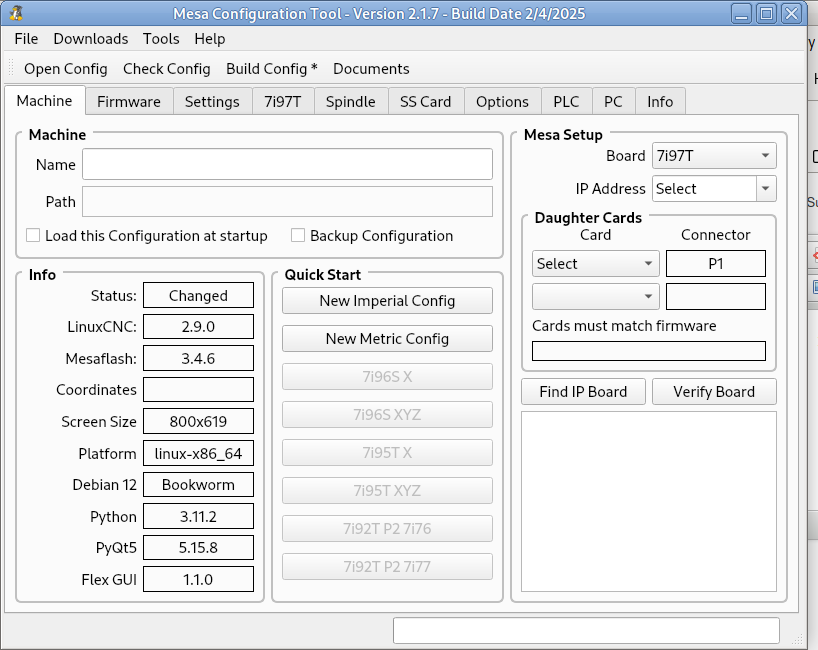
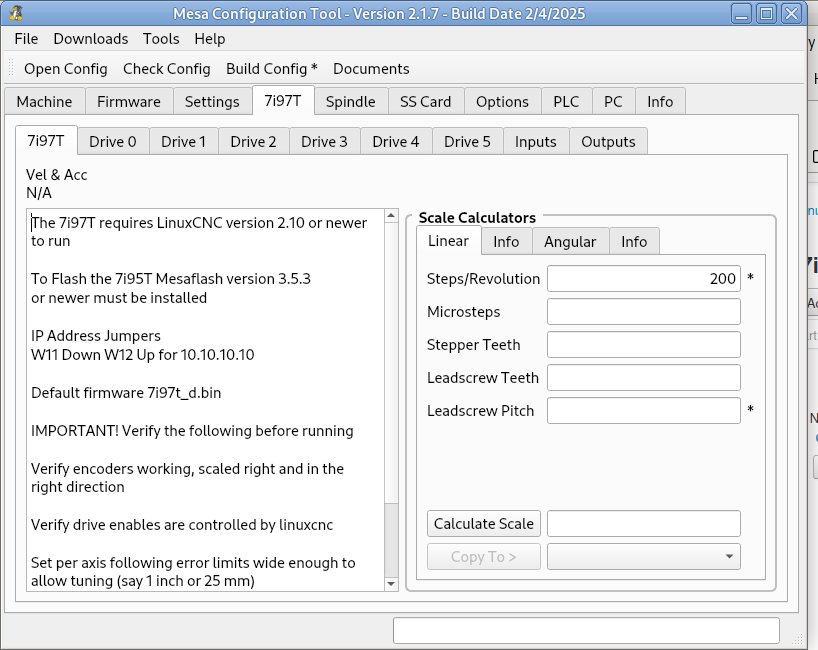
Replied by Wagon56 on topic Raspberry Pi5 GPIO setup
Raspberry Pi5 GPIO setup
Category: Configuration Tools
- unknown
- unknown
06 Feb 2025 21:23
Replied by unknown on topic Raspberry Pi5 GPIO setup
Raspberry Pi5 GPIO setup
Category: Configuration Tools
- Wagon56
- Wagon56
06 Feb 2025 21:18
Replied by Wagon56 on topic Raspberry Pi5 GPIO setup
Raspberry Pi5 GPIO setup
Category: Configuration Tools
- unknown
- unknown
06 Feb 2025 21:11 - 26 May 2025 05:07
Replied by unknown on topic Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Linuxcnc & the Raspberry Pi (4 & 5) Official Images Only!!!
Category: Installing LinuxCNC
- PCW

06 Feb 2025 21:05
Replied by PCW on topic LinuxCNC on Raspberry Pi 5
LinuxCNC on Raspberry Pi 5
Category: Installing LinuxCNC
- unknown
- unknown
06 Feb 2025 21:05
Replied by unknown on topic Raspberry Pi5 GPIO setup
Raspberry Pi5 GPIO setup
Category: Configuration Tools
- unknown
- unknown
06 Feb 2025 20:59
Replied by unknown on topic LinuxCNC on Raspberry Pi 5
LinuxCNC on Raspberry Pi 5
Category: Installing LinuxCNC
- h_munktell
- h_munktell
06 Feb 2025 20:47
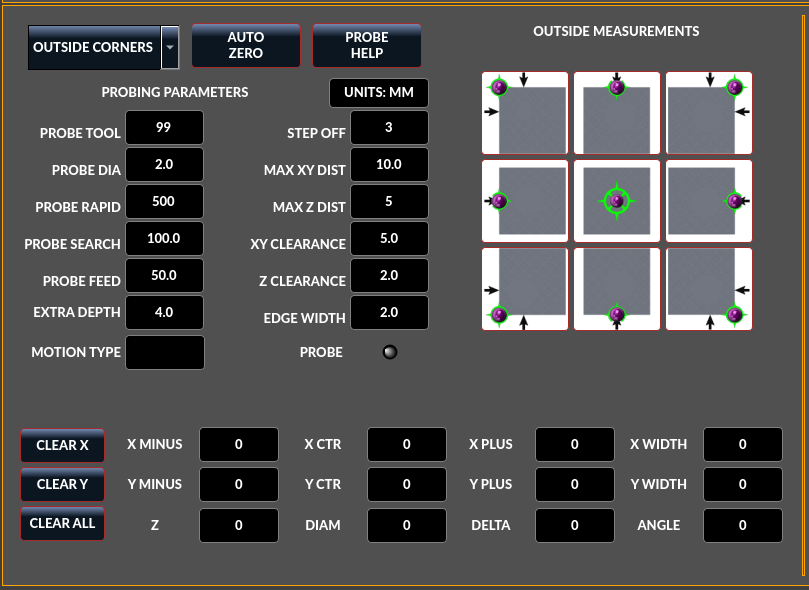
Replied by h_munktell on topic Versa Probe with Qtdragon hang
Versa Probe with Qtdragon hang
Category: Basic Configuration
- unknown
- unknown
06 Feb 2025 20:44 - 06 Feb 2025 21:17
Replied by unknown on topic LinuxCNC on Raspberry Pi 5
LinuxCNC on Raspberry Pi 5
Category: Installing LinuxCNC
- Wagon56
- Wagon56
06 Feb 2025 20:42
Replied by Wagon56 on topic Raspberry Pi5 GPIO setup
Raspberry Pi5 GPIO setup
Category: Configuration Tools
- beauxnez
- beauxnez
06 Feb 2025 20:39 - 06 Feb 2025 20:57
Replied by beauxnez on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- jhandel
- jhandel
06 Feb 2025 20:34
Replied by jhandel on topic LinuxCNC on Raspberry Pi 5
LinuxCNC on Raspberry Pi 5
Category: Installing LinuxCNC
- slowpoke
- slowpoke
06 Feb 2025 20:29
Replied by slowpoke on topic How to get MPG input (hm2_7i96s.0.inm.00.enc0-count) to move axis
How to get MPG input (hm2_7i96s.0.inm.00.enc0-count) to move axis
Category: HAL

Time to create page: 0.467 seconds