Search Results (Searched for: )
- PCW

25 Mar 2026 19:34
Replied by PCW on topic too long hm2_7i97.0.read.tmax or something else?
too long hm2_7i97.0.read.tmax or something else?
Category: Driver Boards
- m0602232
- m0602232
25 Mar 2026 18:43
Replied by m0602232 on topic too long hm2_7i97.0.read.tmax or something else?
too long hm2_7i97.0.read.tmax or something else?
Category: Driver Boards
- PCW
25 Mar 2026 18:25
Replied by PCW on topic too long hm2_7i97.0.read.tmax or something else?
too long hm2_7i97.0.read.tmax or something else?
Category: Driver Boards
- Hakan
- Hakan
25 Mar 2026 17:01
- m0602232
- m0602232
25 Mar 2026 16:29
Replied by m0602232 on topic too long hm2_7i97.0.read.tmax or something else?
too long hm2_7i97.0.read.tmax or something else?
Category: Driver Boards
- jetbadger
- jetbadger
25 Mar 2026 16:19
Replied by jetbadger on topic Lathe C axis homing
Lathe C axis homing
Category: General LinuxCNC Questions
")
- spumco
- spumco
25 Mar 2026 16:05
Replied by spumco on topic Lathe C axis homing
Lathe C axis homing
Category: General LinuxCNC Questions
- AntonioT
- AntonioT
25 Mar 2026 15:57
Replied by AntonioT on topic THC not getting active even when "all seemingly needed" requirements are met
THC not getting active even when "all seemingly needed" requirements are met
Category: Plasmac
- PCW
25 Mar 2026 15:40 - 25 Mar 2026 15:41
Replied by PCW on topic too long hm2_7i97.0.read.tmax or something else?
too long hm2_7i97.0.read.tmax or something else?
Category: Driver Boards
- Hakan
- Hakan
25 Mar 2026 14:59 - 25 Mar 2026 15:20
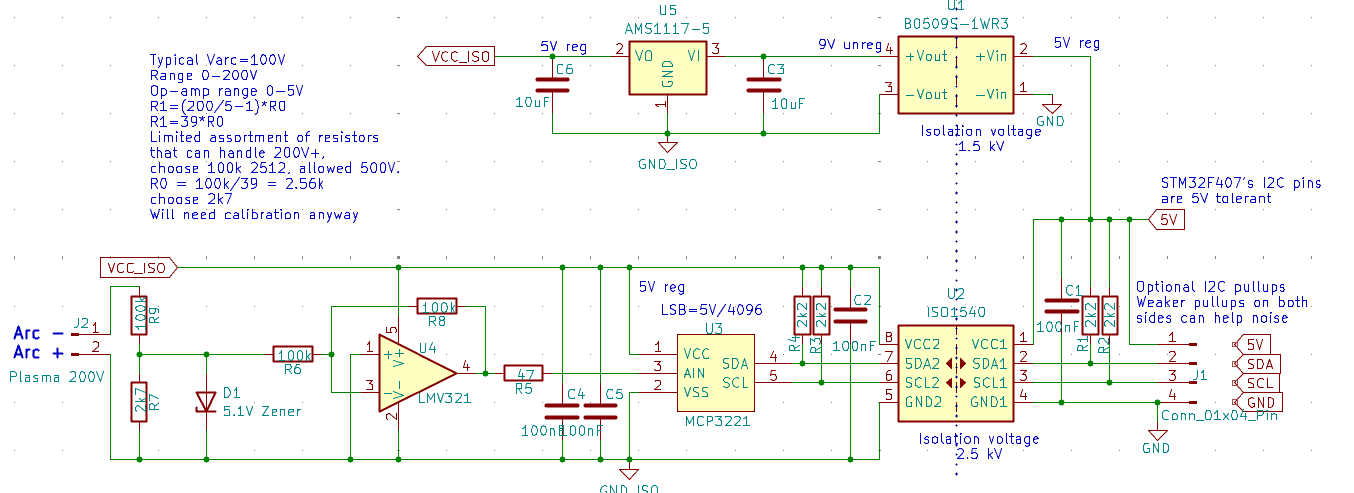
Replied by Hakan on topic Review Request for Arc Volt Sensor Schematic
Review Request for Arc Volt Sensor Schematic
Category: Plasma & Laser
- tommylight

25 Mar 2026 13:13
Replied by tommylight on topic FreeCAD 1.0 Who's using it?
FreeCAD 1.0 Who's using it?
Category: CAD CAM
- jetbadger
- jetbadger
25 Mar 2026 12:58 - 25 Mar 2026 13:23
Lathe C axis homing was created by jetbadger
Lathe C axis homing
Category: General LinuxCNC Questions
- andypugh

25 Mar 2026 12:48
Replied by andypugh on topic Review Request for Arc Volt Sensor Schematic
Review Request for Arc Volt Sensor Schematic
Category: Plasma & Laser
- andypugh
25 Mar 2026 12:37
Replied by andypugh on topic Dragon q6a from Radxa
Dragon q6a from Radxa
Category: General LinuxCNC Questions
- andypugh
25 Mar 2026 12:29
Replied by andypugh on topic W axis machine config
W axis machine config
Category: General LinuxCNC Questions
Time to create page: 0.503 seconds