Search Results (Searched for: )
- tommylight

12 Apr 2024 16:47
Replied by tommylight on topic Getting errors while installing etherlab master
Getting errors while installing etherlab master
Category: EtherCAT
- karlhe
- karlhe
12 Apr 2024 16:39
- Aciera

12 Apr 2024 16:35
- karlhe
- karlhe
12 Apr 2024 16:28
- Nobody
- Nobody
12 Apr 2024 16:17
Replied by Nobody on topic Modicon Lexium 17D driver - help
Modicon Lexium 17D driver - help
Category: HAL
- blazini36
- blazini36
12 Apr 2024 16:09
Replied by blazini36 on topic Concession's for EtherCAT stepgens?
Concession's for EtherCAT stepgens?
Category: EtherCAT
- Cant do this anymore bye all

12 Apr 2024 16:06
Replied by Cant do this anymore bye all on topic Upgrading my Centroid
Upgrading my Centroid
Category: Installing LinuxCNC
- Ritterchen
- Ritterchen
12 Apr 2024 15:58 - 14 Apr 2024 07:22
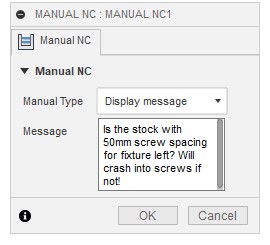
Added Display Message from Fusion 360 Post Processor via ManualNC was created by Ritterchen
Added Display Message from Fusion 360 Post Processor via ManualNC
Category: Fusion 360
- CJ76
- CJ76
12 Apr 2024 15:32 - 12 Apr 2024 15:39
- nick.smith
- nick.smith
12 Apr 2024 15:17 - 12 Apr 2024 15:21
- nick.smith
- nick.smith
12 Apr 2024 15:13
Replied by nick.smith on topic Feedrate/Rapid/Spindle Override reset to 100% using a physical button
Feedrate/Rapid/Spindle Override reset to 100% using a physical button
Category: PathPilot
- cncsparko
- cncsparko
12 Apr 2024 13:43
- cncsparko
- cncsparko
12 Apr 2024 13:26
- Mehta_123
- Mehta_123
12 Apr 2024 13:05
Getting errors while installing etherlab master was created by Mehta_123
Getting errors while installing etherlab master
Category: EtherCAT
- tommylight
12 Apr 2024 12:08
Replied by tommylight on topic New Project in the Works Plasma 7i96s with 2 THCad2
New Project in the Works Plasma 7i96s with 2 THCad2
Category: Show Your Stuff
Time to create page: 1.441 seconds