Search Results (Searched for: )
- Xnke
- Xnke
11 Mar 2026 03:52
- brianallen
- brianallen
11 Mar 2026 03:45 - 13 Mar 2026 04:37
Replied by brianallen on topic some qs about Axis tuning
some qs about Axis tuning
Category: General LinuxCNC Questions
- NWE

11 Mar 2026 02:34
Replied by NWE on topic Laser Head Height Sensor – Looking for a Beta Tester
Laser Head Height Sensor – Looking for a Beta Tester
Category: Plasma & Laser
- rszemeti
- rszemeti
11 Mar 2026 02:00
Replied by rszemeti on topic Base threadwith Mesa?
Base threadwith Mesa?
Category: General LinuxCNC Questions
- tommylight

11 Mar 2026 01:12
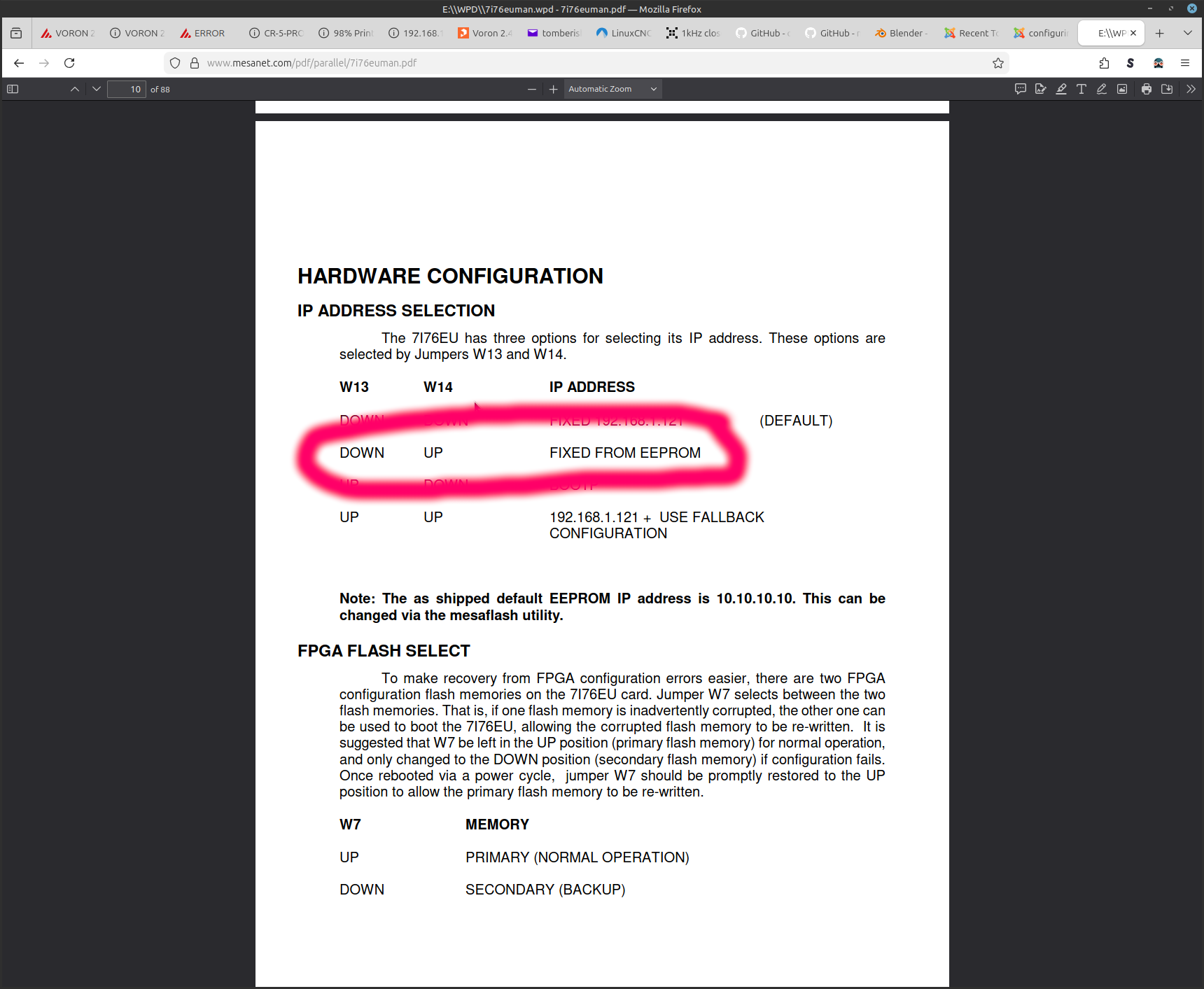
Replied by tommylight on topic configuring 7i76eu to ip address 10.10.10.10
configuring 7i76eu to ip address 10.10.10.10
Category: Driver Boards
- georgio
- georgio
11 Mar 2026 00:58
configuring 7i76eu to ip address 10.10.10.10 was created by georgio
configuring 7i76eu to ip address 10.10.10.10
Category: Driver Boards
- elisilva
- elisilva
10 Mar 2026 23:48
Replied by elisilva on topic Laser Head Height Sensor – Looking for a Beta Tester
Laser Head Height Sensor – Looking for a Beta Tester
Category: Plasma & Laser
- tommylight
10 Mar 2026 23:39
Nice small 5 axis machine with some nice features was created by tommylight
Nice small 5 axis machine with some nice features
Category: Show Your Stuff
- rodw

10 Mar 2026 23:36
- tommylight
10 Mar 2026 23:26 - 10 Mar 2026 23:27
Replied by tommylight on topic Configuring and Homing dual Y Axes
Configuring and Homing dual Y Axes
Category: PnCConf Wizard
- scsmith1451

10 Mar 2026 23:10
Replied by scsmith1451 on topic Configuring and Homing dual Y Axes
Configuring and Homing dual Y Axes
Category: PnCConf Wizard
- tommylight
10 Mar 2026 22:27
Replied by tommylight on topic Machine choice for composite panel CNC + probe-driven XY/Z G-code compensation
Machine choice for composite panel CNC + probe-driven XY/Z G-code compensation
Category: Milling Machines
- tommylight
10 Mar 2026 22:17
Replied by tommylight on topic Base threadwith Mesa?
Base threadwith Mesa?
Category: General LinuxCNC Questions
- Badger1875
- Badger1875
10 Mar 2026 22:16 - 10 Mar 2026 22:17
Replied by Badger1875 on topic Crazy characters in code after import from another document (Word or eq.)
Crazy characters in code after import from another document (Word or eq.)
Category: G&M Codes
- kb0thn
- kb0thn
10 Mar 2026 22:12
Replied by kb0thn on topic Laser power scaling based on speed and direction
Laser power scaling based on speed and direction
Category: HAL Examples
Time to create page: 0.380 seconds