Search Results (Searched for: )
- Hakan
- Hakan
03 Mar 2026 08:53
- Artur_1617
03 Mar 2026 08:42
Replied by Artur_1617 on topic DynexHobby impulse 2 for sale
DynexHobby impulse 2 for sale
Category: User Exchange
- Marcos DC

03 Mar 2026 08:18
Replied by Marcos DC on topic Separating CiA402 Logic from EtherCAT (lcec): Modular Adapter + Drive Stub Valid
Separating CiA402 Logic from EtherCAT (lcec): Modular Adapter + Drive Stub Valid
Category: EtherCAT
- mh300
- mh300
03 Mar 2026 08:06
- Giovanni
- Giovanni
03 Mar 2026 07:50
- Muecke

03 Mar 2026 06:46
- Muecke
03 Mar 2026 06:06
 Und bei mir funktionieren zwei Browser nicht. Handy und Tablet gehen auch nicht.
Und bei mir funktionieren zwei Browser nicht. Handy und Tablet gehen auch nicht. - T_D
- T_D
03 Mar 2026 06:01
- T_D
- T_D
03 Mar 2026 05:35
- hitchhiker
- hitchhiker
03 Mar 2026 04:27 - 03 Mar 2026 05:39
Replied by hitchhiker on topic EMCO Compact 5 cnc Turret with dc motor and no feedback
EMCO Compact 5 cnc Turret with dc motor and no feedback
Category: Advanced Configuration
- sivaraj
- sivaraj
03 Mar 2026 02:48
- tcbmetalworks
- tcbmetalworks
03 Mar 2026 02:42
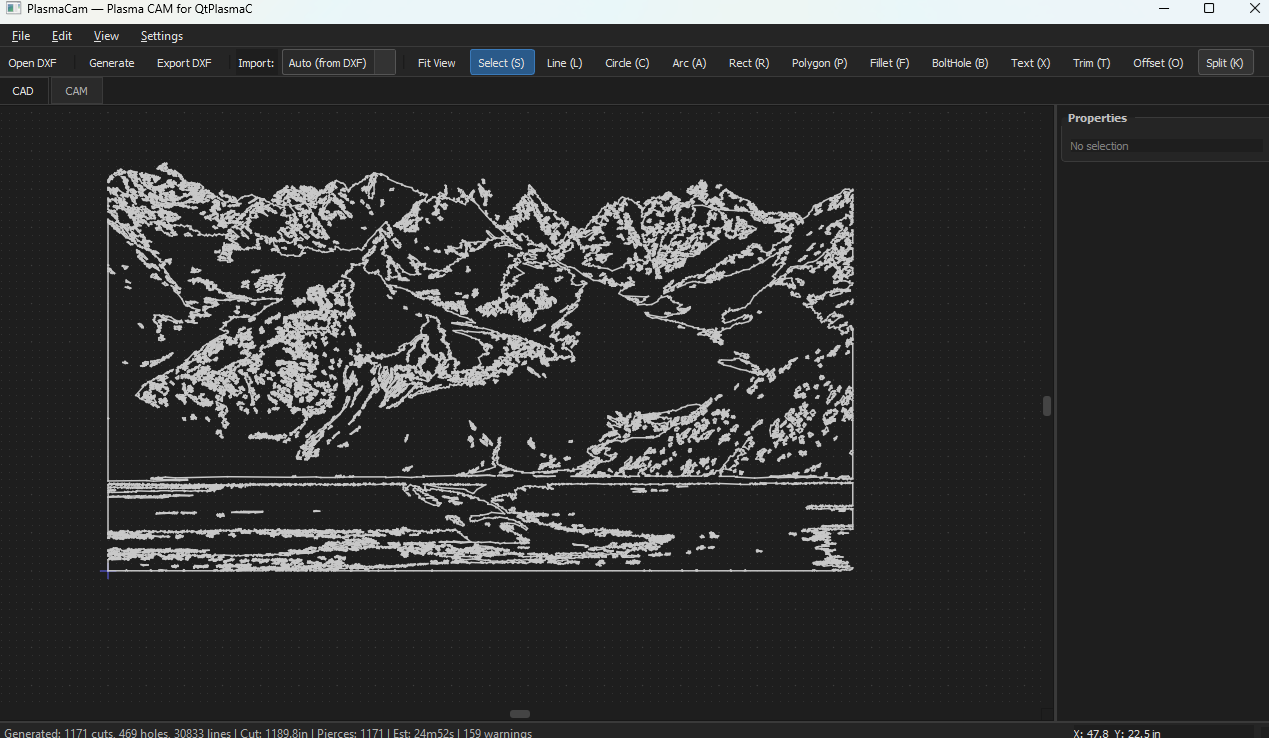
Replied by tcbmetalworks on topic QTPLASMAC integrated cad/cam
QTPLASMAC integrated cad/cam
Category: Plasmac
- tommylight

03 Mar 2026 00:50
Replied by tommylight on topic EMCO Compact 5 cnc Turret with dc motor and no feedback
EMCO Compact 5 cnc Turret with dc motor and no feedback
Category: Advanced Configuration
- rodw

03 Mar 2026 00:21
Replied by rodw on topic XHC WHB04B development?
XHC WHB04B development?
Category: General LinuxCNC Questions
- tommylight
02 Mar 2026 23:09
Time to create page: 0.318 seconds