Search Results (Searched for: )
- aDm1N

01 Mar 2026 20:02 - 01 Mar 2026 20:04
- aDm1N
01 Mar 2026 18:20
- hmnijp
- hmnijp
01 Mar 2026 17:43
Replied by hmnijp on topic motion channels for robotic atc library
motion channels for robotic atc library
Category: General LinuxCNC Questions
- andrax

01 Mar 2026 17:39
- Q-Man0815
- Q-Man0815
01 Mar 2026 16:29 - 02 Mar 2026 06:37
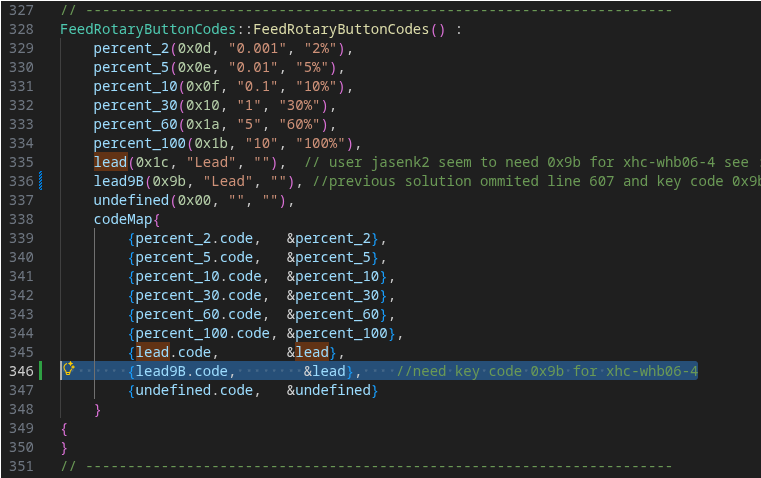
Handrad XHC-WHB04b-6 braucht 9b für LEAD Funktion was created by Q-Man0815
Handrad XHC-WHB04b-6 braucht 9b für LEAD Funktion
Category: Deutsch
- petlegpete
- petlegpete
01 Mar 2026 14:46
Replied by petlegpete on topic 7i92TM defect? How to verify?
7i92TM defect? How to verify?
Category: Driver Boards
- RotarySMP

01 Mar 2026 14:27 - 01 Mar 2026 14:48
Replied by RotarySMP on topic Schaublin 125-CNC retrofit.
Schaublin 125-CNC retrofit.
Category: Turning
- Finngineering
- Finngineering
01 Mar 2026 14:05
Replied by Finngineering on topic XHC WHB04B development?
XHC WHB04B development?
Category: General LinuxCNC Questions
- Hakan
- Hakan
01 Mar 2026 11:31 - 01 Mar 2026 11:33
Replied by Hakan on topic XHC WHB04B development?
XHC WHB04B development?
Category: General LinuxCNC Questions
- Muecke

01 Mar 2026 10:41 - 01 Mar 2026 10:45
- Marcos DC

01 Mar 2026 10:10 - 01 Mar 2026 10:20
Replied by Marcos DC on topic Separating CiA402 Logic from EtherCAT (lcec): Modular Adapter + Drive Stub Valid
Separating CiA402 Logic from EtherCAT (lcec): Modular Adapter + Drive Stub Valid
Category: EtherCAT
- Eisbaeeer
- Eisbaeeer
01 Mar 2026 09:49
Replied by Eisbaeeer on topic [AUTOMATIC] [XML] [HAL] [INI] [GENERATORS] [ETHERCAT] [LICHUAN]
[AUTOMATIC] [XML] [HAL] [INI] [GENERATORS] [ETHERCAT] [LICHUAN]
Category: EtherCAT
- Hakan
- Hakan
01 Mar 2026 08:17
- ihavenofish
- ihavenofish
01 Mar 2026 06:58
Replied by ihavenofish on topic motion channels for robotic atc library
motion channels for robotic atc library
Category: General LinuxCNC Questions
Time to create page: 0.275 seconds