Search Results (Searched for: )
- Robbbbbb
- Robbbbbb
11 Jul 2024 09:49 - 11 Jul 2024 10:10
Replied by Robbbbbb on topic Problems with Lichuan Ethercat servo drive
Problems with Lichuan Ethercat servo drive
Category: EtherCAT
- timaer
- timaer
11 Jul 2024 09:45 - 11 Jul 2024 09:47
Replied by timaer on topic Built my .ui, works in SIM, how do I move it to the machine?
Built my .ui, works in SIM, how do I move it to the machine?
Category: QtPyVCP
- meme
- meme
11 Jul 2024 09:28
Replied by meme on topic [solved] Auto Tool Measurement
[solved] Auto Tool Measurement
Category: Qtvcp
- Aciera

11 Jul 2024 09:23
Replied by Aciera on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
- endian

11 Jul 2024 09:11
Replied by endian on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
- timaer
- timaer
11 Jul 2024 09:10 - 11 Jul 2024 09:10
Replied by timaer on topic [resolved]Ethercat servo spindle orient problem while using M19 ?
[resolved]Ethercat servo spindle orient problem while using M19 ?
Category: General LinuxCNC Questions
- marq_torque

11 Jul 2024 09:04 - 11 Jul 2024 09:10
Replied by marq_torque on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
- rodw

11 Jul 2024 09:03
Replied by rodw on topic Linuxcnc's Ethercat in Raspberry pi-5
Linuxcnc's Ethercat in Raspberry pi-5
Category: EtherCAT
- marq_torque
11 Jul 2024 09:02
Replied by marq_torque on topic How to monitor OP mode in Panasonic A6B Ethercat
How to monitor OP mode in Panasonic A6B Ethercat
Category: EtherCAT
- Aciera
11 Jul 2024 08:56
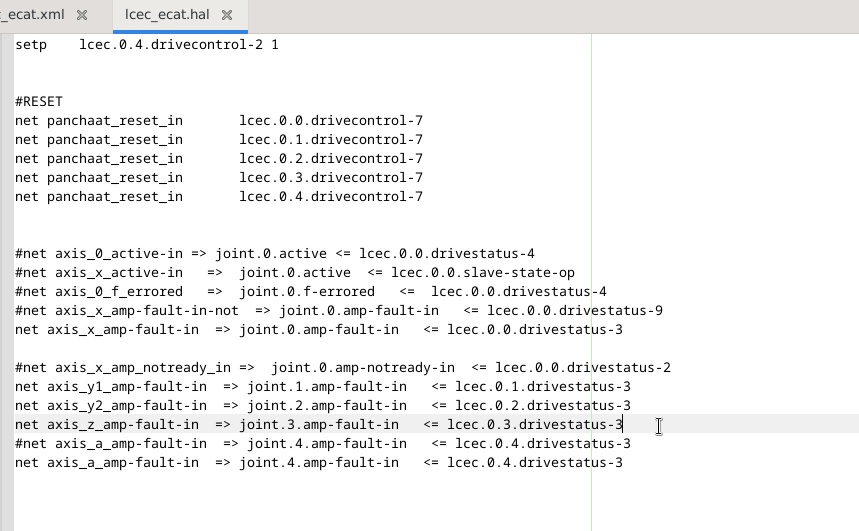
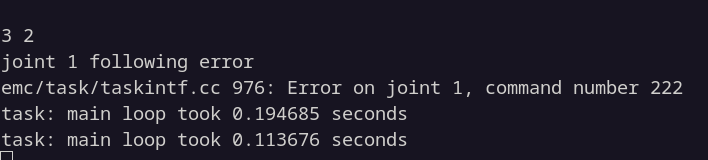
Replied by Aciera on topic Gmoccapy SCARA EtherCAT drive - joint error
Gmoccapy SCARA EtherCAT drive - joint error
Category: Gmoccapy
- Aciera
11 Jul 2024 08:46
Replied by Aciera on topic [resolved]Ethercat servo spindle orient problem while using M19 ?
[resolved]Ethercat servo spindle orient problem while using M19 ?
Category: General LinuxCNC Questions
- DPFlex
- DPFlex
11 Jul 2024 08:46
Gmoccapy SCARA EtherCAT drive - joint error was created by DPFlex
Gmoccapy SCARA EtherCAT drive - joint error
Category: Gmoccapy



- timaer
- timaer
11 Jul 2024 08:36 - 11 Jul 2024 08:47
Replied by timaer on topic [resolved]Ethercat servo spindle orient problem while using M19 ?
[resolved]Ethercat servo spindle orient problem while using M19 ?
Category: General LinuxCNC Questions
- Aciera
11 Jul 2024 08:19
Replied by Aciera on topic [resolved]Ethercat servo spindle orient problem while using M19 ?
[resolved]Ethercat servo spindle orient problem while using M19 ?
Category: General LinuxCNC Questions
- MarkoPolo
- MarkoPolo
11 Jul 2024 08:05
Replied by MarkoPolo on topic [solved] Auto Tool Measurement
[solved] Auto Tool Measurement
Category: Qtvcp
Time to create page: 0.541 seconds