Search Results (Searched for: )
- RMJ fabrication
- RMJ fabrication
30 May 2026 03:19
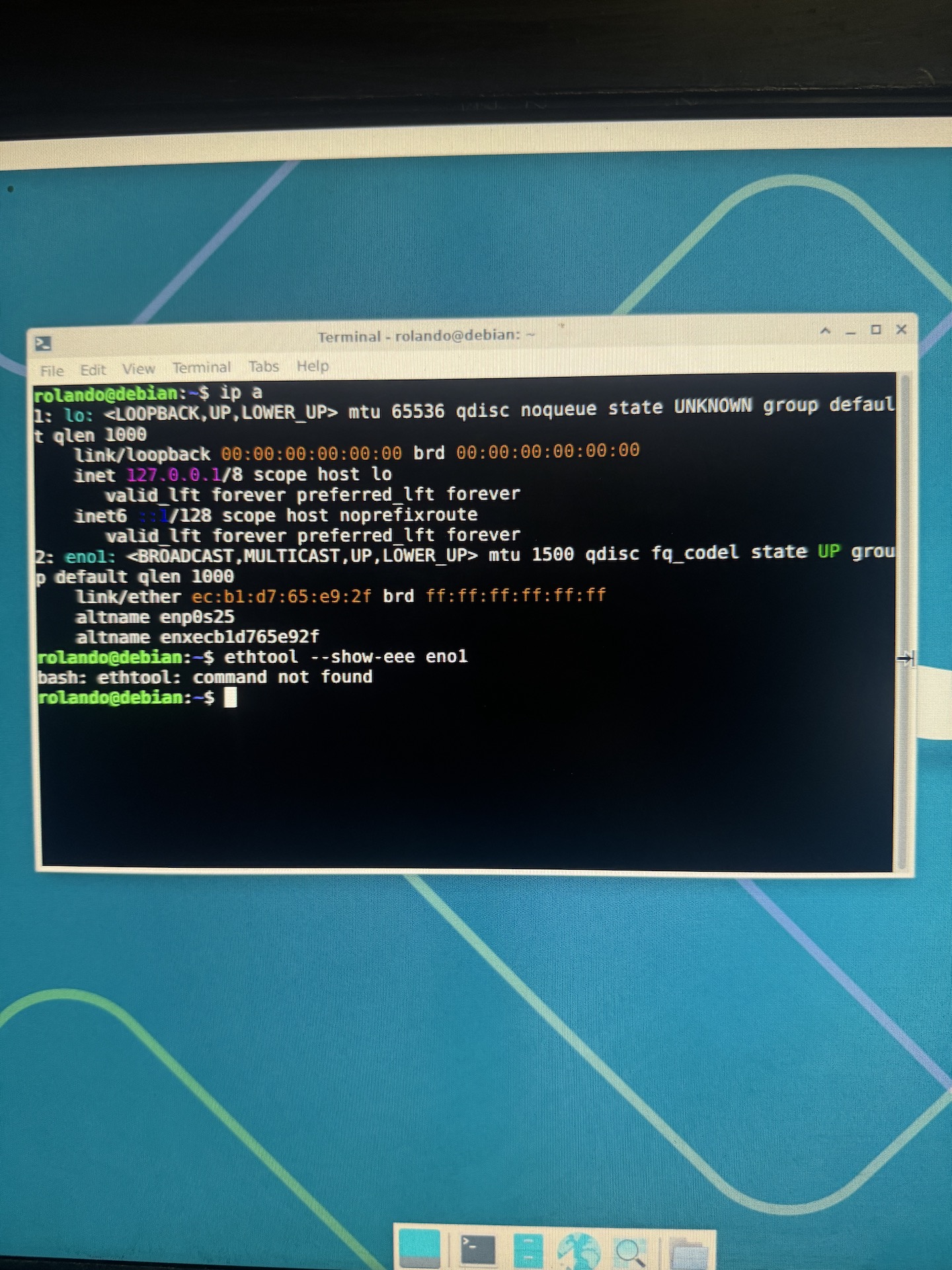
Replied by RMJ fabrication on topic Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Category: Plasmac
- tommylight

30 May 2026 01:18
- HansU

29 May 2026 21:15
- HansU
29 May 2026 21:04
Replied by HansU on topic Can't SIM programs with spindle speed over 12500rpm
Can't SIM programs with spindle speed over 12500rpm
Category: General LinuxCNC Questions
")
- Todd Zuercher

29 May 2026 19:40
Replied by Todd Zuercher on topic Reset Custom M-codes on Machine Disable?
Reset Custom M-codes on Machine Disable?
Category: General LinuxCNC Questions
- Todd Zuercher
29 May 2026 19:28 - 29 May 2026 19:34
Replied by Todd Zuercher on topic Reset Custom M-codes on Machine Disable?
Reset Custom M-codes on Machine Disable?
Category: General LinuxCNC Questions
- Sascha H.
29 May 2026 18:44
Replied by Sascha H. on topic Jumping motion with XHC-WHB04B pendant
Jumping motion with XHC-WHB04B pendant
Category: Basic Configuration
- andrax

29 May 2026 18:30
Replied by andrax on topic TTL to differential converter (STEP / DIR / ENABLE)
TTL to differential converter (STEP / DIR / ENABLE)
Category: Computers and Hardware
- spumco
- spumco
29 May 2026 17:50
Replied by spumco on topic Reset Custom M-codes on Machine Disable?
Reset Custom M-codes on Machine Disable?
Category: General LinuxCNC Questions
- PCW

29 May 2026 17:39 - 29 May 2026 21:02
Replied by PCW on topic TTL to differential converter (STEP / DIR / ENABLE)
TTL to differential converter (STEP / DIR / ENABLE)
Category: Computers and Hardware
- PedPEx
- PedPEx
29 May 2026 17:20
") Wishing you all a great weekend!
Wishing you all a great weekend! - Todd Zuercher
29 May 2026 16:53
Replied by Todd Zuercher on topic Reset Custom M-codes on Machine Disable?
Reset Custom M-codes on Machine Disable?
Category: General LinuxCNC Questions
- PCW
29 May 2026 16:41
- RMJ fabrication
- RMJ fabrication
29 May 2026 15:57
Replied by RMJ fabrication on topic Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Ethernet connection to Mesa 7i76e disconnecting on its own after one minute
Category: Plasmac
- PCW
29 May 2026 14:08
Time to create page: 0.320 seconds