Search Results (Searched for: )
- tommylight

25 Dec 2024 08:19
Replied by tommylight on topic Probe basic Install errors
Probe basic Install errors
Category: Basic Configuration
- Max
- Max
25 Dec 2024 07:50
Replied by Max on topic One axis loosing it completely
One axis loosing it completely
Category: General LinuxCNC Questions
- gblcody

25 Dec 2024 05:50
Probe basic Install errors was created by gblcody
Probe basic Install errors
Category: Basic Configuration
- Derek
- Derek
25 Dec 2024 04:37
Replied by Derek on topic Retrofitting an 89 Chiron FZ12W aka Igor
Retrofitting an 89 Chiron FZ12W aka Igor
Category: Milling Machines
- Lcvette

25 Dec 2024 04:06 - 25 Dec 2024 04:08
Replied by Lcvette on topic To Probe Basic from Gmoccapy
To Probe Basic from Gmoccapy
Category: QtPyVCP
- Lcvette
25 Dec 2024 04:03
Replied by Lcvette on topic To Probe Basic from Gmoccapy
To Probe Basic from Gmoccapy
Category: QtPyVCP
- aikiaviator
- aikiaviator
25 Dec 2024 03:28
Replied by aikiaviator on topic To Probe Basic from Gmoccapy
To Probe Basic from Gmoccapy
Category: QtPyVCP
- ccatlett1984
- ccatlett1984
25 Dec 2024 02:13
Replied by ccatlett1984 on topic Wiring VFD to MESA 7C80
Wiring VFD to MESA 7C80
Category: Milling Machines
- PCW

25 Dec 2024 01:57
- ccatlett1984
- ccatlett1984
25 Dec 2024 01:42 - 25 Dec 2024 01:46
Wiring VFD to MESA 7C80 was created by ccatlett1984
Wiring VFD to MESA 7C80
Category: Milling Machines
- WarcoVMC
- WarcoVMC
25 Dec 2024 01:15
- Grotius

25 Dec 2024 01:11 - 25 Dec 2024 01:30
- gardenweazel

25 Dec 2024 01:05
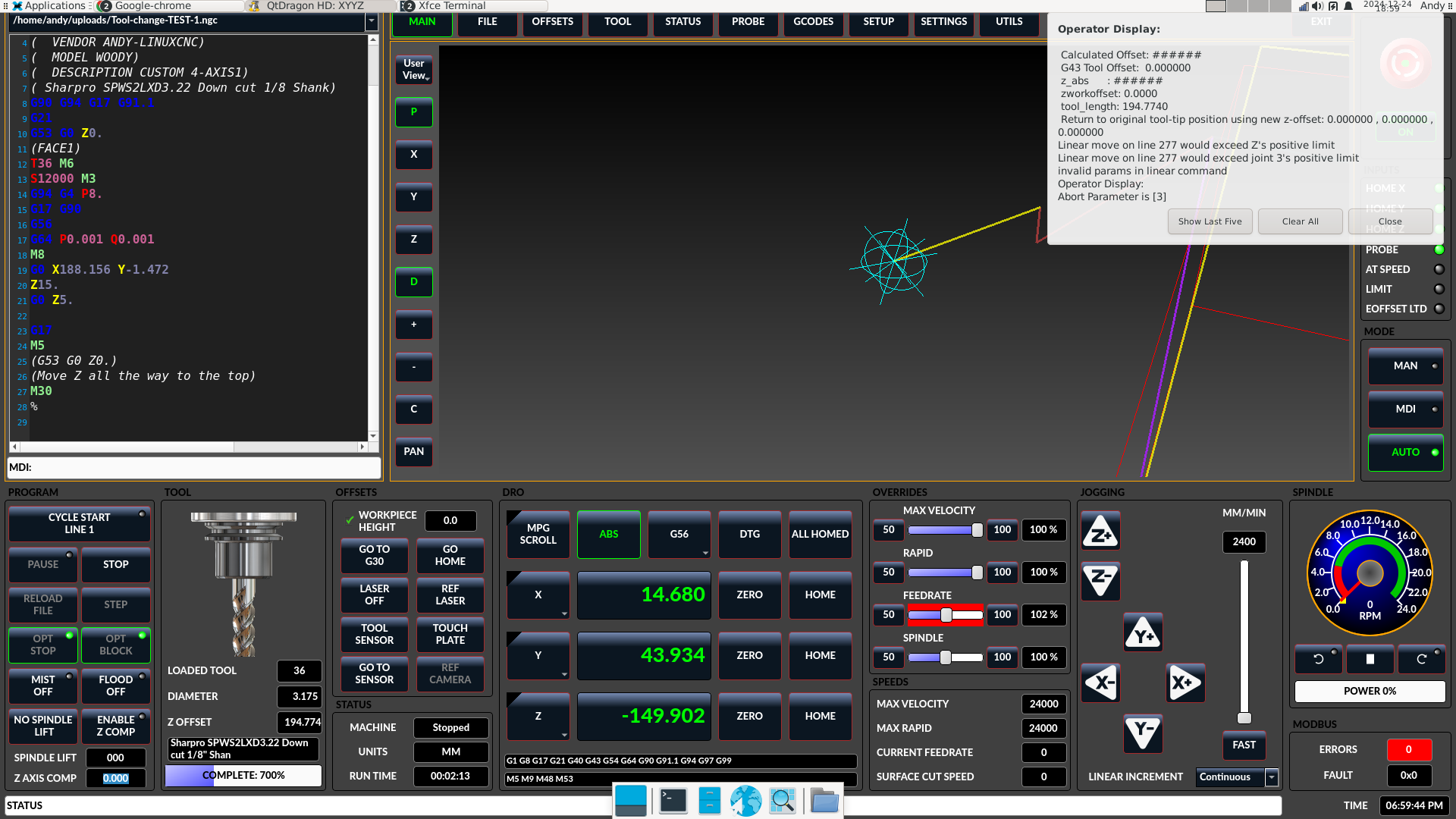
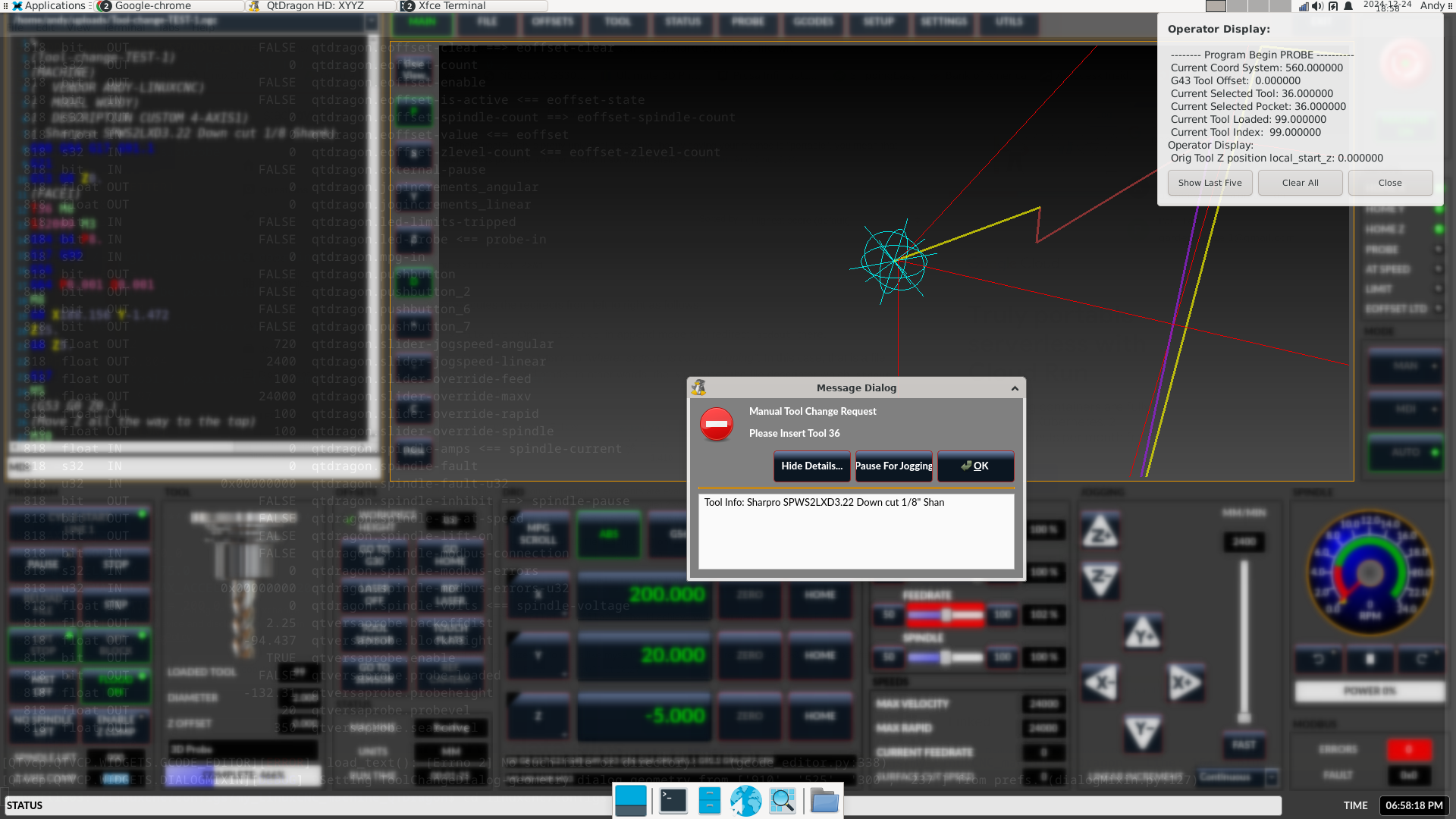
Replied by gardenweazel on topic Inconsistent values from Versaprobe
Inconsistent values from Versaprobe
Category: Qtvcp
- PCW
25 Dec 2024 00:14 - 25 Dec 2024 00:21
Replied by PCW on topic Threading Index Varies With Speed
Threading Index Varies With Speed
Category: General LinuxCNC Questions
- RDA
- RDA
24 Dec 2024 23:28
Time to create page: 0.522 seconds