Search Results (Searched for: )
- meister
- meister
01 Aug 2024 14:19
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
")
- cnbbom
- cnbbom
01 Aug 2024 14:14 - 01 Aug 2024 14:15
Replied by cnbbom on topic help with installation
help with installation
Category: Installing LinuxCNC
- cnbbom
- cnbbom
01 Aug 2024 14:11
Replied by cnbbom on topic help with installation
help with installation
Category: Installing LinuxCNC
- JT

01 Aug 2024 13:55
- Mecanix
- Mecanix
01 Aug 2024 13:52 - 01 Aug 2024 13:55
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- scottlaird

01 Aug 2024 13:50
Replied by scottlaird on topic EtherCAT config: one Slave supports 3 modules (motors)
EtherCAT config: one Slave supports 3 modules (motors)
Category: EtherCAT
- tommylight

01 Aug 2024 13:45 - 01 Aug 2024 13:46
Replied by tommylight on topic Is a parport fast enough?
Is a parport fast enough?
Category: General LinuxCNC Questions
- Mecanix
- Mecanix
01 Aug 2024 13:41
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware



- Lpkkk
- Lpkkk
01 Aug 2024 13:41
Replied by Lpkkk on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
- Grotius

01 Aug 2024 13:39
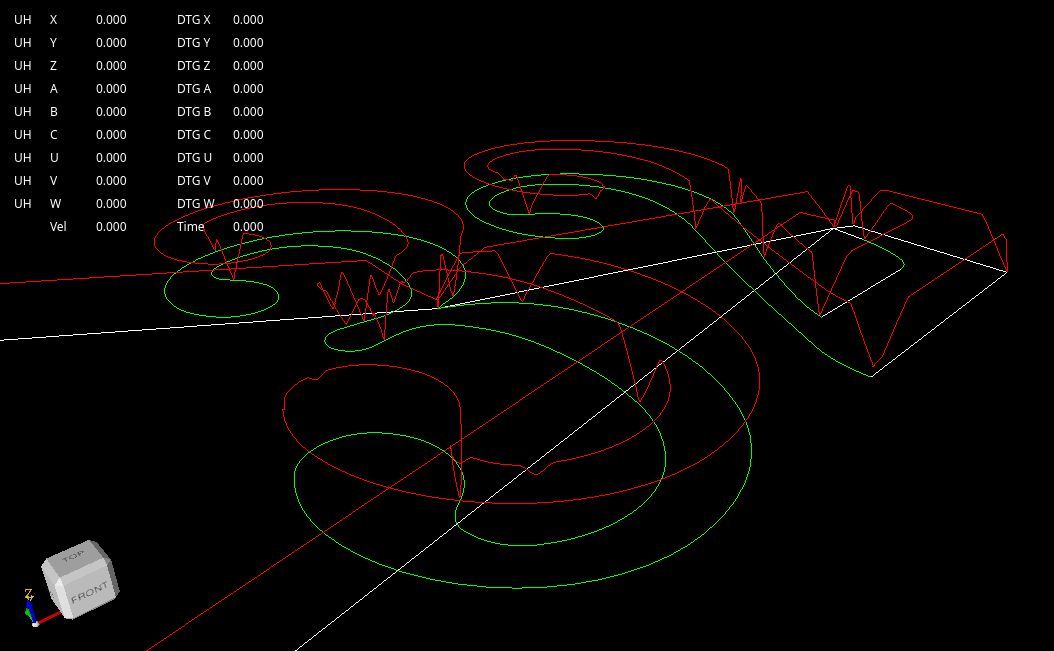
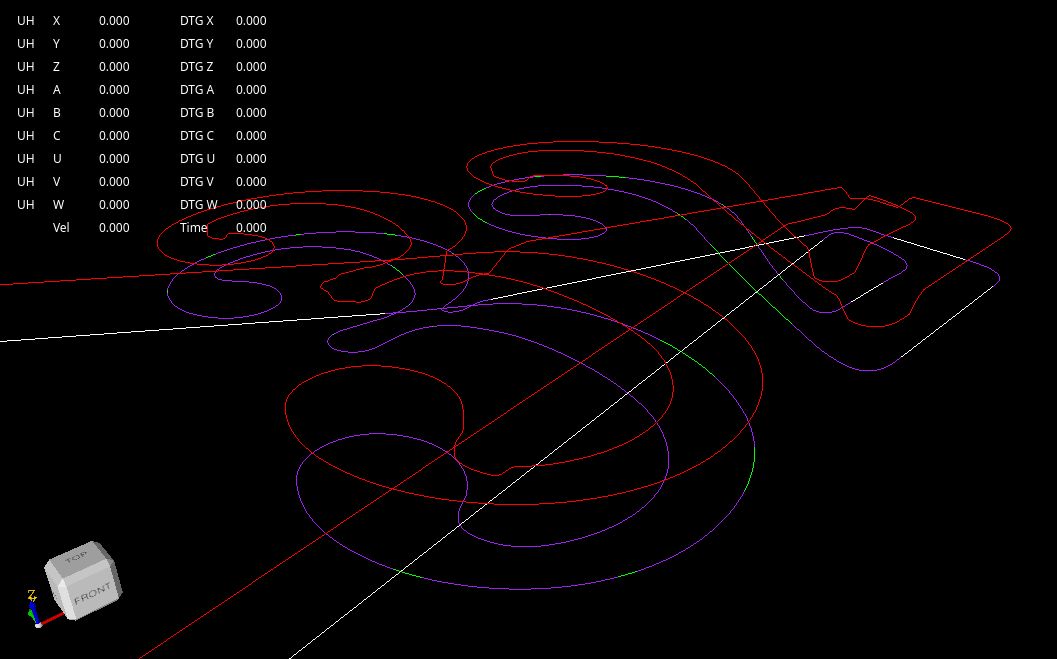
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions
- Grotius
01 Aug 2024 13:33
Replied by Grotius on topic Trajectory Planner using Ruckig Lib
Trajectory Planner using Ruckig Lib
Category: General LinuxCNC Questions

- tommylight
01 Aug 2024 13:23
- Sandro
- Sandro
01 Aug 2024 13:22
Replied by Sandro on topic Servo drive config and first movement
Servo drive config and first movement
Category: EtherCAT
- Moutomation
- Moutomation
01 Aug 2024 13:16
Replied by Moutomation on topic Ethercat installation from repositories - how to step by step
Ethercat installation from repositories - how to step by step
Category: EtherCAT
- Cant do this anymore bye all

01 Aug 2024 13:13
Replied by Cant do this anymore bye all on topic help with installation
help with installation
Category: Installing LinuxCNC
Time to create page: 0.540 seconds