- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
- meister
- Away
- Platinum Member
-

Less
More
- Posts: 756
- Thank you received: 477
31 Jul 2024 18:47 #306556
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
now for you (MecanixDev board is addet to the dev branch):
generating from terminal:
PYTHONPATH=. bin/rio-generator riocore/configs/MecanixDev/config-test.json
gui-setup:
PYTHONPATH=. bin/rio-setup riocore/configs/MecanixDev/config-test.json
generating from terminal:
PYTHONPATH=. bin/rio-generator riocore/configs/MecanixDev/config-test.json
gui-setup:
PYTHONPATH=. bin/rio-setup riocore/configs/MecanixDev/config-test.json
The following user(s) said Thank You: Mecanix
Please Log in or Create an account to join the conversation.
- meister
- Away
- Platinum Member
-
Less
More
- Posts: 756
- Thank you received: 477
31 Jul 2024 18:58 - 31 Jul 2024 19:01 #306557
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
I'm not quite sure that everything works in the IDE, I haven't tested that for a long time.
but you can set the path there in the console like this:
then you can build the bitfile with:
EDIT: the config i build is only for testing, serial port will not work for LinuxCNC,
if you want to run LinuxCNC you need SPI (raspberry) or UDP (W5500 / UDP2SPI-Bridge)
but you can set the path there in the console like this:
export PATH=$PATH:/opt/gowin/IDE/bin/then you can build the bitfile with:
(cd Output/Mecanix/Gateware ; make clean all)ls Output/Mecanix/Gateware/impl/pnr/project.fsEDIT: the config i build is only for testing, serial port will not work for LinuxCNC,
if you want to run LinuxCNC you need SPI (raspberry) or UDP (W5500 / UDP2SPI-Bridge)
Last edit: 31 Jul 2024 19:01 by meister.
The following user(s) said Thank You: tommylight, Mecanix
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
01 Aug 2024 13:41 #306616
by Mecanix

I took onto your advice and stopped by my local gizmo shop to pick a W5500 Lite. Inserting a visual of my benchtop hardware set-up for inspiration and good luck!


Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Everything set-up & synthetizing-wise is working flawlessly. Said it before and I'll say it again; pretty EPIC work you've done for us
[/code][/code][code][code]EDIT: the config i build is only for testing, serial port will not work for LinuxCNC, if you want to run LinuxCNC you need SPI (raspberry) or UDP (W5500 / UDP2SPI-Bridge)
I took onto your advice and stopped by my local gizmo shop to pick a W5500 Lite. Inserting a visual of my benchtop hardware set-up for inspiration and good luck!
The following user(s) said Thank You: Clive S, meister, samueldutradasilva
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
01 Aug 2024 13:52 - 01 Aug 2024 13:55 #306619
by Mecanix
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Note: Prolly not going to work, or be super-reliable with those inductive antena jumper leads lol. Good enough for testing anyway. If this all works out I'll amend the dev board and swing on a wiznet w5500 part with the magnetics, route cross-talk outta of it, add the highspeed opto and level shifters for ins & outs. Guessing the SPI is plenty sufficient for comm and so no need for the realteck gigabit, methink.
I'll keep you updated. Thanks again, meister.
I'll keep you updated. Thanks again, meister.
Last edit: 01 Aug 2024 13:55 by Mecanix.
The following user(s) said Thank You: meister
Please Log in or Create an account to join the conversation.
- meister
- Away
- Platinum Member
-
Less
More
- Posts: 756
- Thank you received: 477
01 Aug 2024 14:19 #306623
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
thank you, you make me embarrassed ")
i am not yet satisfied with the W5500, better not to plan for it, there are packet losses and i have no idea why, it can't be because of the cables as i have test setups without them.
At the moment a UDP2SPI bridge (esp32) is still the best solution.
In principle, you could also programme the FPGA via an esp32 (JTAG or SPI flash), but you would have to adapt the firmware first.
I also have a working RMII interface, but so far I have only been able to get it to run on a TangPrimer20K (with gowin toolchain) and even there I still have a few problems.
i am not yet satisfied with the W5500, better not to plan for it, there are packet losses and i have no idea why, it can't be because of the cables as i have test setups without them.
At the moment a UDP2SPI bridge (esp32) is still the best solution.
In principle, you could also programme the FPGA via an esp32 (JTAG or SPI flash), but you would have to adapt the firmware first.
I also have a working RMII interface, but so far I have only been able to get it to run on a TangPrimer20K (with gowin toolchain) and even there I still have a few problems.
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
01 Aug 2024 15:02 #306625
by Mecanix
The RMII reference design is an excellent one indeed. Not easy to implement though, you have my respect.

Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Are you sure about that w5500 pkts losses issue? Perhaps my silly jumper leads are less inductive/destructive than anticipated, I don't know. To me the losses are within 'functional specs' when a brutal ping beat-up is applied (see visual). Not 0% perfect ofc, but then no interfaces are perfect under that stress, to my limited knowledge mind you.i am not yet satisfied with the W5500, better not to plan for it, there are packet losses and i have no idea why, it can't be because of the cables as i have test setups without them.
I also have a working RMII interface, but so far I have only been able to get it to run on a TangPrimer20K (with gowin toolchain) and even there I still have a few problems.
The RMII reference design is an excellent one indeed. Not easy to implement though, you have my respect.
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
01 Aug 2024 15:33 #306628
by Mecanix
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Comparison added for the sake of having something to compare too. Nothing scientific ofc, however goes to show. Here's me brutalizing the gateway the same way, yet here we are talking, lket alone streaming 4k vids, dwloading gigabytes of data from int'l servers.
I'm not an network expert but, this W5500-over-RIO seems to be bullet proof!! Fairly impressed already.

I'm not an network expert but, this W5500-over-RIO seems to be bullet proof!! Fairly impressed already.
Please Log in or Create an account to join the conversation.
- meister
- Away
- Platinum Member
-
Less
More
- Posts: 756
- Thank you received: 477
01 Aug 2024 15:33 - 01 Aug 2024 15:35 #306629
by meister
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
the rmii code is not mine, unfortunately my knowledge of verilog is not sufficient for that, i have only adapted it to rio
github.com/sipeed/TangPrimer-20K-example...Ethernet/verilog_UDP
you can run the rio-test tool to see the timeouts:
all in all, it works quite well with the w5500, but with the esp32 I get no timeouts at all
EDIT: the ping is completely handled inside the W5500, so it's not a good test
github.com/sipeed/TangPrimer-20K-example...Ethernet/verilog_UDP
you can run the rio-test tool to see the timeouts:
PYTHONPATH=. bin/rio-test riocore/configs/MecanixDev/config-test.json 192.168.10.194:2390all in all, it works quite well with the w5500, but with the esp32 I get no timeouts at all
EDIT: the ping is completely handled inside the W5500, so it's not a good test
Last edit: 01 Aug 2024 15:35 by meister.
The following user(s) said Thank You: Mecanix
Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
01 Aug 2024 15:52 #306632
by Mecanix
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
hmm, ok fair enough. I'm no expert and so glad you are. I'm quite grateful I can actually get step pulses out to the oscope and comm with Lcnc already. Pretty cool. Guess fine-tuning this comm reliably will require some significant effort (knowledge?). I'll have a look at the RMII and Esp32 solutions when time allows, and see what comes out. Expect stupid/clueless questions coming your way soon enough though!!

Please Log in or Create an account to join the conversation.
- Mecanix
- Offline
- Platinum Member
-
Less
More
- Posts: 447
- Thank you received: 228
01 Aug 2024 17:34 #306642
by Mecanix
Replied by Mecanix on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
@meister
Late on and I got it to work. However and as you've pointed out, the comm needs fine tuning! Can I bother you once more and ask for a detailed hardware desc for the ESP32 you've mentioned? Is there a UDP module in particular you'd like us to use and dev around? I'm also happy to get a RMII breakerboard as a second option. Both would be ideal though. All-in-all it's working well. Congrats!!
Visual of the w5500 output:
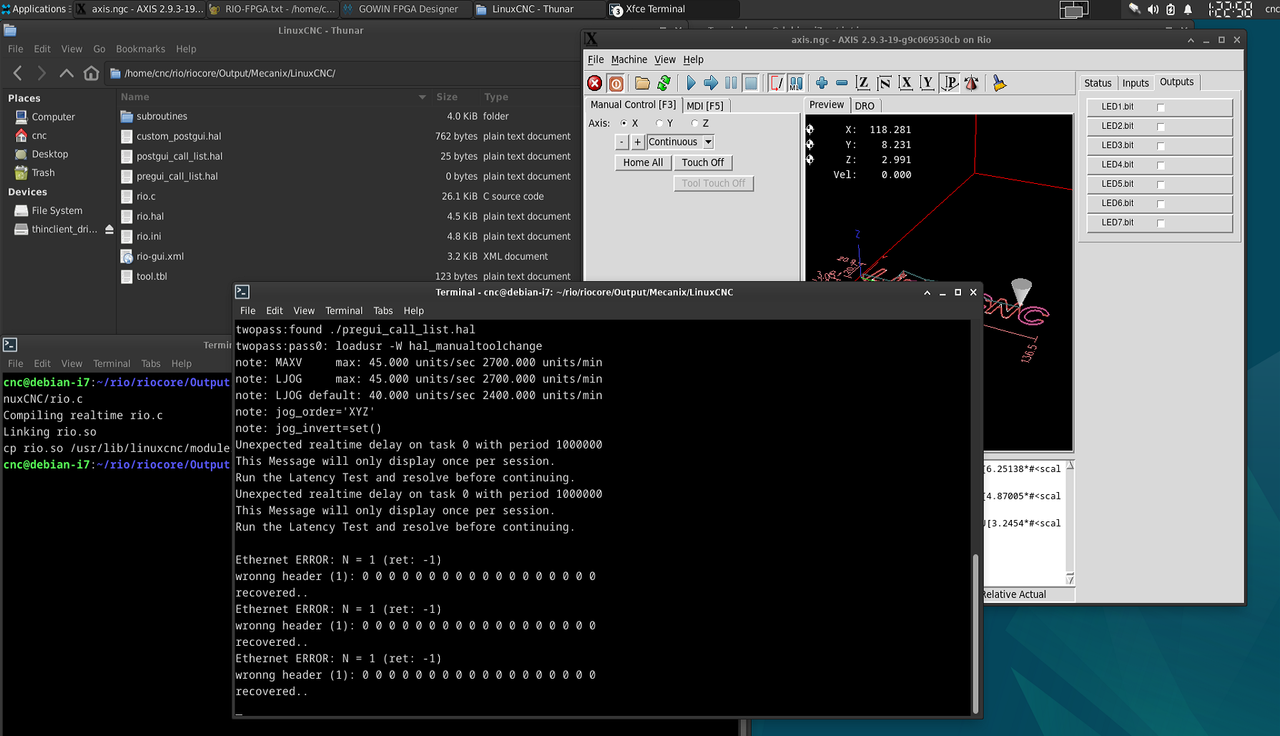
Late on and I got it to work. However and as you've pointed out, the comm needs fine tuning! Can I bother you once more and ask for a detailed hardware desc for the ESP32 you've mentioned? Is there a UDP module in particular you'd like us to use and dev around? I'm also happy to get a RMII breakerboard as a second option. Both would be ideal though. All-in-all it's working well. Congrats!!
Visual of the w5500 output:
Please Log in or Create an account to join the conversation.
- Hardware & Machines
- Computers and Hardware
- LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Time to create page: 0.387 seconds