Search Results (Searched for: )
- AlexMagToast

27 Apr 2026 08:33
- grandixximo

27 Apr 2026 08:25
- nighteagle
- nighteagle
27 Apr 2026 07:55
Replied by nighteagle on topic Linuxcnc erste Schritte und erste Probleme, NVEM und Remora
Linuxcnc erste Schritte und erste Probleme, NVEM und Remora
Category: Deutsch
- rodw

27 Apr 2026 05:28
- spumco
- spumco
27 Apr 2026 04:34
(Solved) G43 not being applied in g-code was created by spumco
(Solved) G43 not being applied in g-code
Category: General LinuxCNC Questions
- cmorley
- cmorley
27 Apr 2026 01:35
- cmorley
- cmorley
27 Apr 2026 01:24
- tommylight

26 Apr 2026 23:53
- rhscdn
- rhscdn
26 Apr 2026 23:41
- Askjerry

26 Apr 2026 23:18
Replied by Askjerry on topic MESA card (LAN) failing to connect.
MESA card (LAN) failing to connect.
Category: General LinuxCNC Questions
- MuriloPedreiro
- MuriloPedreiro
26 Apr 2026 23:08
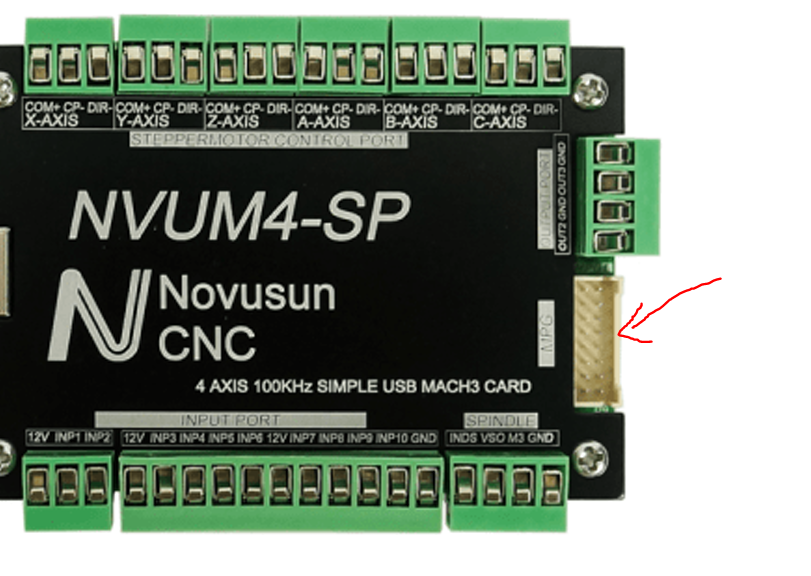
NVUM/NVEM 4 - SP Board Connector was created by MuriloPedreiro
NVUM/NVEM 4 - SP Board Connector
Category: Computers and Hardware

- tommylight
26 Apr 2026 21:50
Replied by tommylight on topic MESA card (LAN) failing to connect.
MESA card (LAN) failing to connect.
Category: General LinuxCNC Questions
")
- mariob
- mariob
26 Apr 2026 20:34 - 26 Apr 2026 20:37
Replied by mariob on topic Linuxcnc erste Schritte und erste Probleme, NVEM und Remora
Linuxcnc erste Schritte und erste Probleme, NVEM und Remora
Category: Deutsch
- Konstantin
- Konstantin
26 Apr 2026 20:12 - 26 Apr 2026 20:14
- rodw
26 Apr 2026 19:08
Replied by rodw on topic Error after running the PnCConf Wizard
Error after running the PnCConf Wizard
Category: PnCConf Wizard
Time to create page: 0.433 seconds