Search Results (Searched for: )
- andrax

21 Mar 2026 10:52
Replied by andrax on topic Problem bei installation Ethercat
Problem bei installation Ethercat
Category: Deutsch
- ihavenofish
- ihavenofish
21 Mar 2026 10:51
Replied by ihavenofish on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
- oldmanzwing
- oldmanzwing
21 Mar 2026 10:27
Ethercat boards and hardware was created by oldmanzwing
Ethercat boards and hardware
Category: Driver Boards
- grandixximo

21 Mar 2026 10:14 - 21 Mar 2026 10:16
Replied by grandixximo on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
- ihavenofish
- ihavenofish
21 Mar 2026 09:32
Replied by ihavenofish on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
- ihavenofish
- ihavenofish
21 Mar 2026 05:33
Replied by ihavenofish on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
- NWE

21 Mar 2026 04:07
- NWE
21 Mar 2026 03:50 - 21 Mar 2026 04:00
- ihavenofish
- ihavenofish
21 Mar 2026 02:46
Replied by ihavenofish on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
- MaHa
- MaHa
21 Mar 2026 01:52
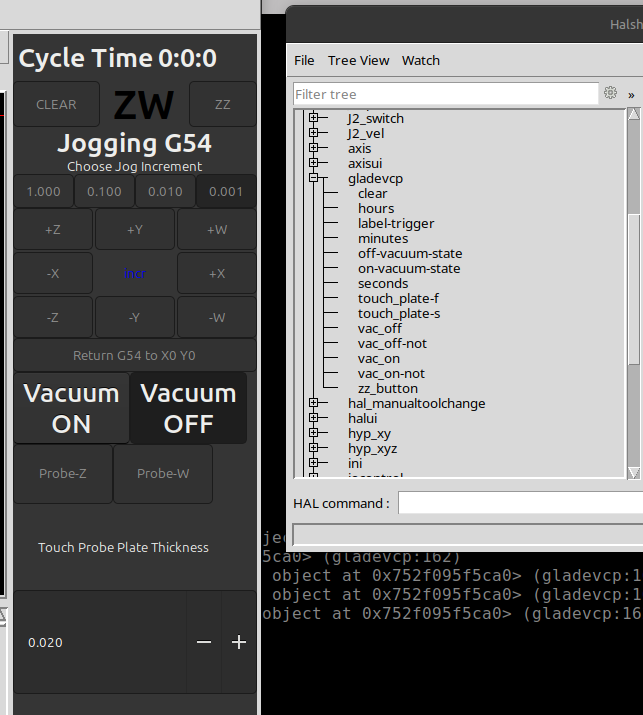
Replied by MaHa on topic Updating Old GladeVCP Files?
Updating Old GladeVCP Files?
Category: GladeVCP


- meister
- meister
20 Mar 2026 20:05
Replied by meister on topic LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
LinuxCNC-RIO - RealtimeIO for LinuxCNC based on FPGA (ICE40 / ECP5)
Category: Computers and Hardware
- Todd Zuercher

20 Mar 2026 20:02
Replied by Todd Zuercher on topic Updating Old GladeVCP Files?
Updating Old GladeVCP Files?
Category: GladeVCP
- Aciera

20 Mar 2026 19:30 - 20 Mar 2026 19:34
Replied by Aciera on topic Updating Old GladeVCP Files?
Updating Old GladeVCP Files?
Category: GladeVCP
- Todd Zuercher
20 Mar 2026 19:20
Replied by Todd Zuercher on topic Updating Old GladeVCP Files?
Updating Old GladeVCP Files?
Category: GladeVCP
- andrax
20 Mar 2026 18:15
Replied by andrax on topic andypugh’s nice HAL schematic
andypugh’s nice HAL schematic
Category: HAL
Time to create page: 0.335 seconds