Search Results (Searched for: )
- scsmith1451

19 Apr 2026 19:26
Launching gladevcp panel with gmoccapy was created by scsmith1451
Launching gladevcp panel with gmoccapy
Category: Gmoccapy
- Dudelbert
- Dudelbert
19 Apr 2026 17:59
Replied by Dudelbert on topic Considering a Full Rewire on a Working Schaublin 125 CNC
Considering a Full Rewire on a Working Schaublin 125 CNC
Category: Turning
- spumco
- spumco
19 Apr 2026 17:54 - 19 Apr 2026 17:57
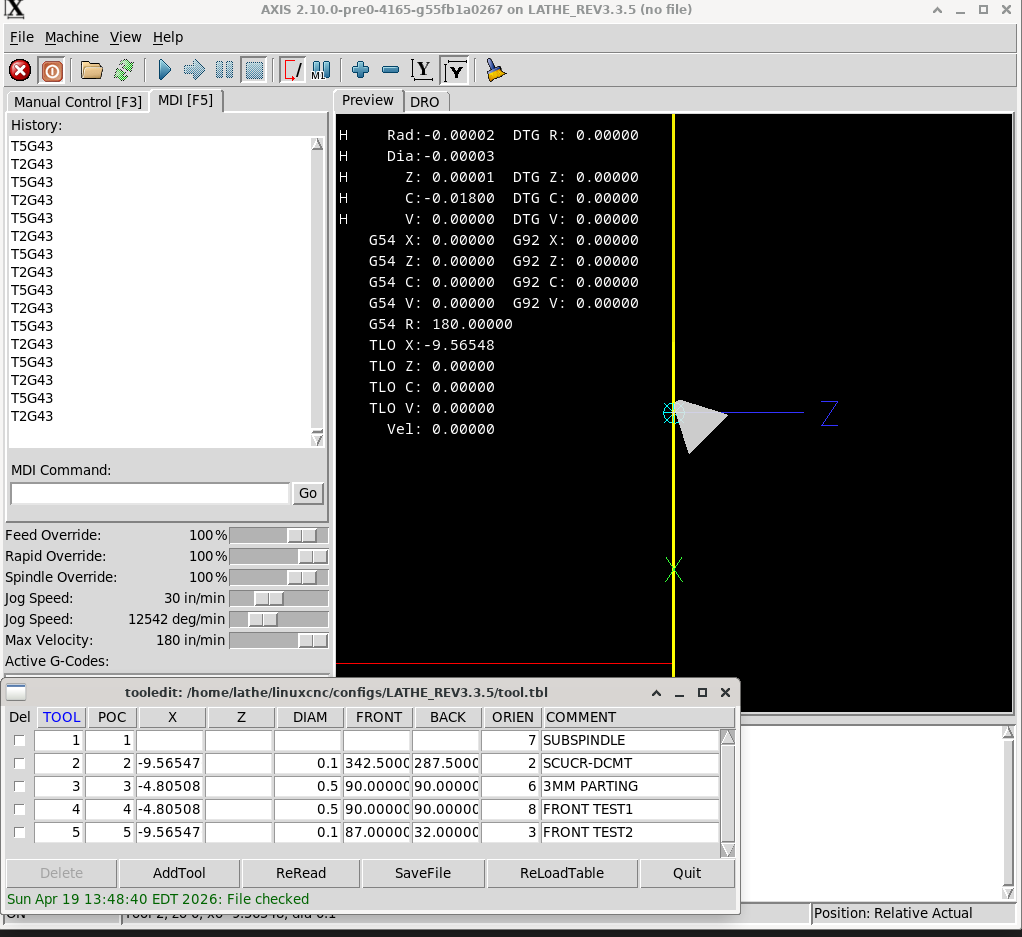
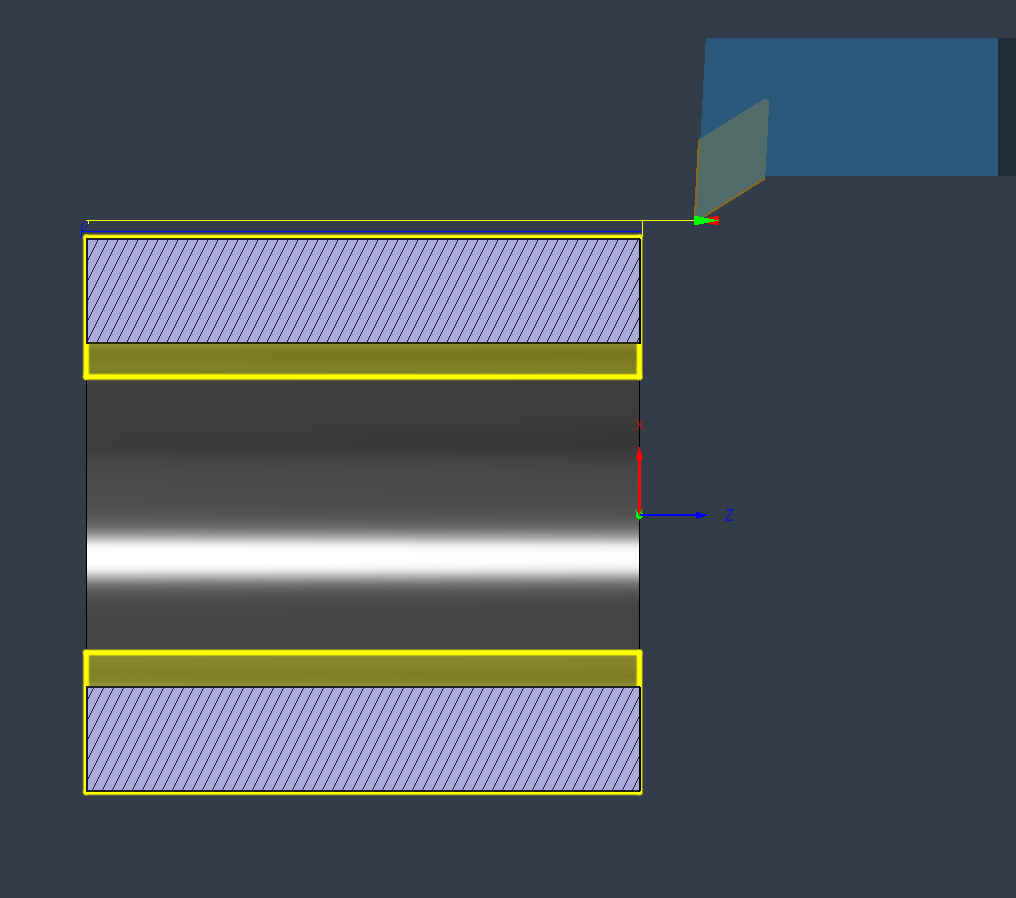
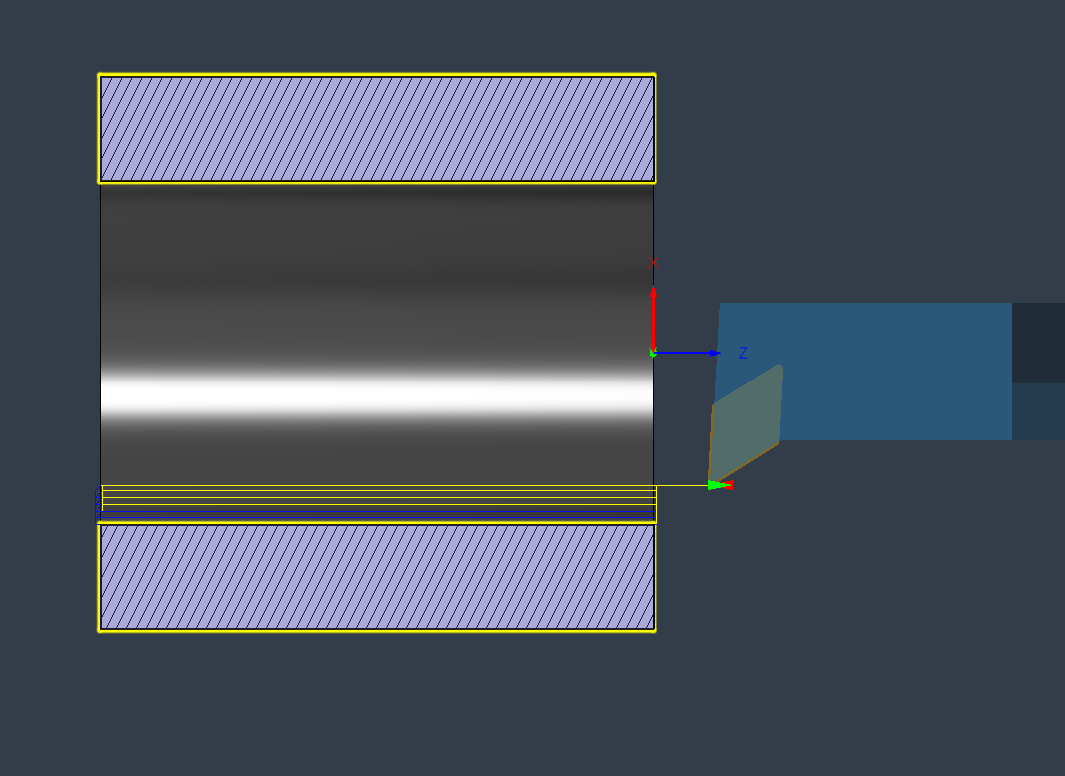
Replied by spumco on topic REMAP: gang lathe tool orientation
REMAP: gang lathe tool orientation
Category: Advanced Configuration
- andypugh

19 Apr 2026 17:43
Replied by andypugh on topic HAL component for tangential knife
HAL component for tangential knife
Category: HAL
- andypugh
19 Apr 2026 16:29
Replied by andypugh on topic REMAP: gang lathe tool orientation
REMAP: gang lathe tool orientation
Category: Advanced Configuration
- andypugh
19 Apr 2026 15:54
- andypugh
19 Apr 2026 15:42
Replied by andypugh on topic Proper value for FERROR ? (EtherCAT Servo)
Proper value for FERROR ? (EtherCAT Servo)
Category: EtherCAT
- spumco
- spumco
19 Apr 2026 15:27
Replied by spumco on topic REMAP: gang lathe tool orientation
REMAP: gang lathe tool orientation
Category: Advanced Configuration
- RotarySMP

19 Apr 2026 15:07
Replied by RotarySMP on topic Retrofitting a 1986 Maho MH400E
Retrofitting a 1986 Maho MH400E
Category: Milling Machines
- Tserakhau
- Tserakhau
19 Apr 2026 14:47
Replied by Tserakhau on topic Retrofitting a 1986 Maho MH400E
Retrofitting a 1986 Maho MH400E
Category: Milling Machines
- spumco
- spumco
19 Apr 2026 14:05
Replied by spumco on topic Considering a Full Rewire on a Working Schaublin 125 CNC
Considering a Full Rewire on a Working Schaublin 125 CNC
Category: Turning
- cmorley
- cmorley
19 Apr 2026 13:29
- BIBIGUL
- BIBIGUL
19 Apr 2026 13:17 - 19 Apr 2026 13:31
Replied by BIBIGUL on topic Remora - ethernet NVEM / EC300 / EC500 cnc board
Remora - ethernet NVEM / EC300 / EC500 cnc board
Category: Computers and Hardware
") CC2S = 01 (TI2FP2 --> TI2). CH2
CC2S = 01 (TI2FP2 --> TI2). CH2- andrax

19 Apr 2026 12:30
Tuning Steperonline A6 Servos was created by andrax
Tuning Steperonline A6 Servos
Category: EtherCAT
- endian

19 Apr 2026 11:49 - 19 Apr 2026 11:54
Time to create page: 0.438 seconds