Search Results (Searched for: )
- RotarySMP

19 Apr 2026 06:41
Replied by RotarySMP on topic Considering a Full Rewire on a Working Schaublin 125 CNC
Considering a Full Rewire on a Working Schaublin 125 CNC
Category: Turning
- spumco
- spumco
19 Apr 2026 05:05
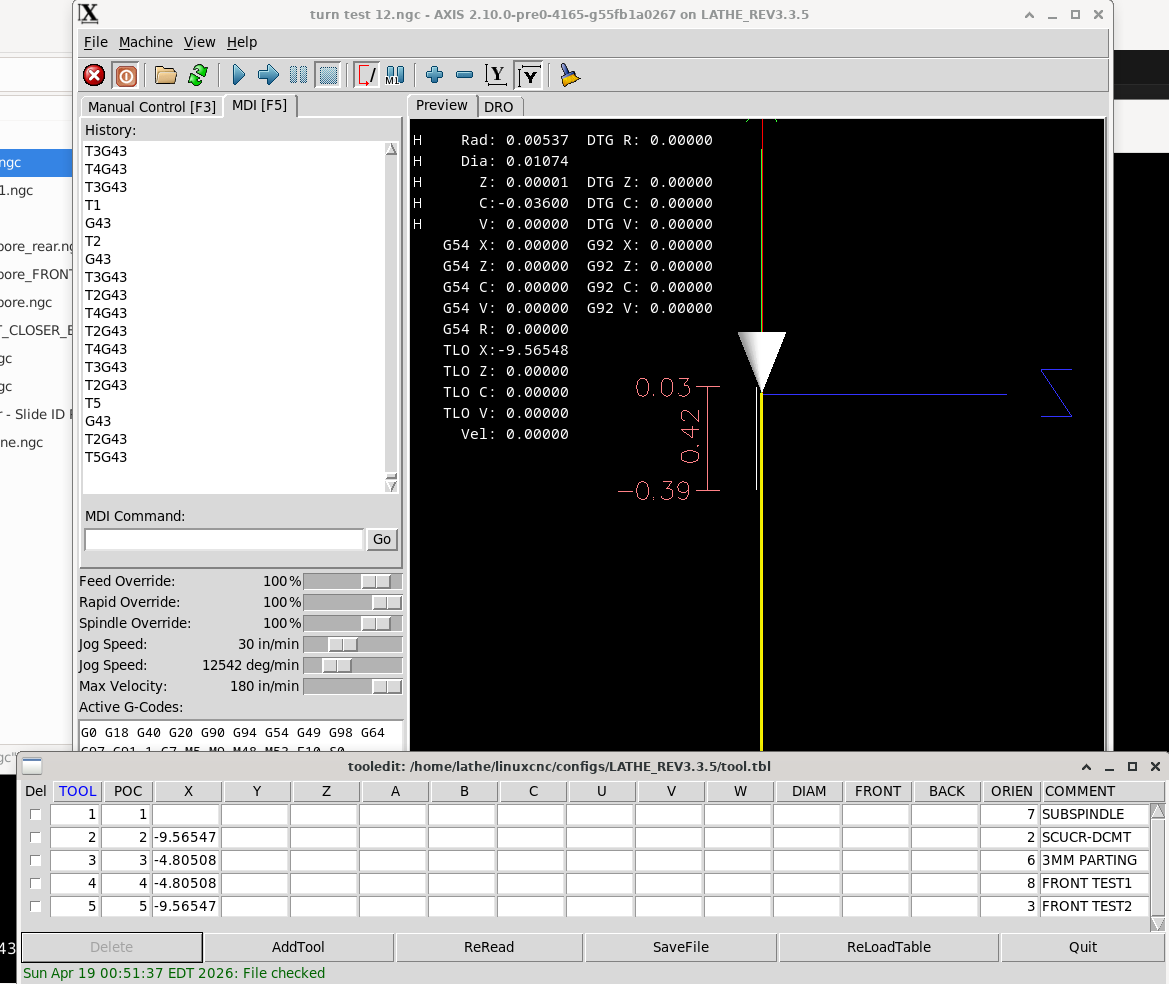
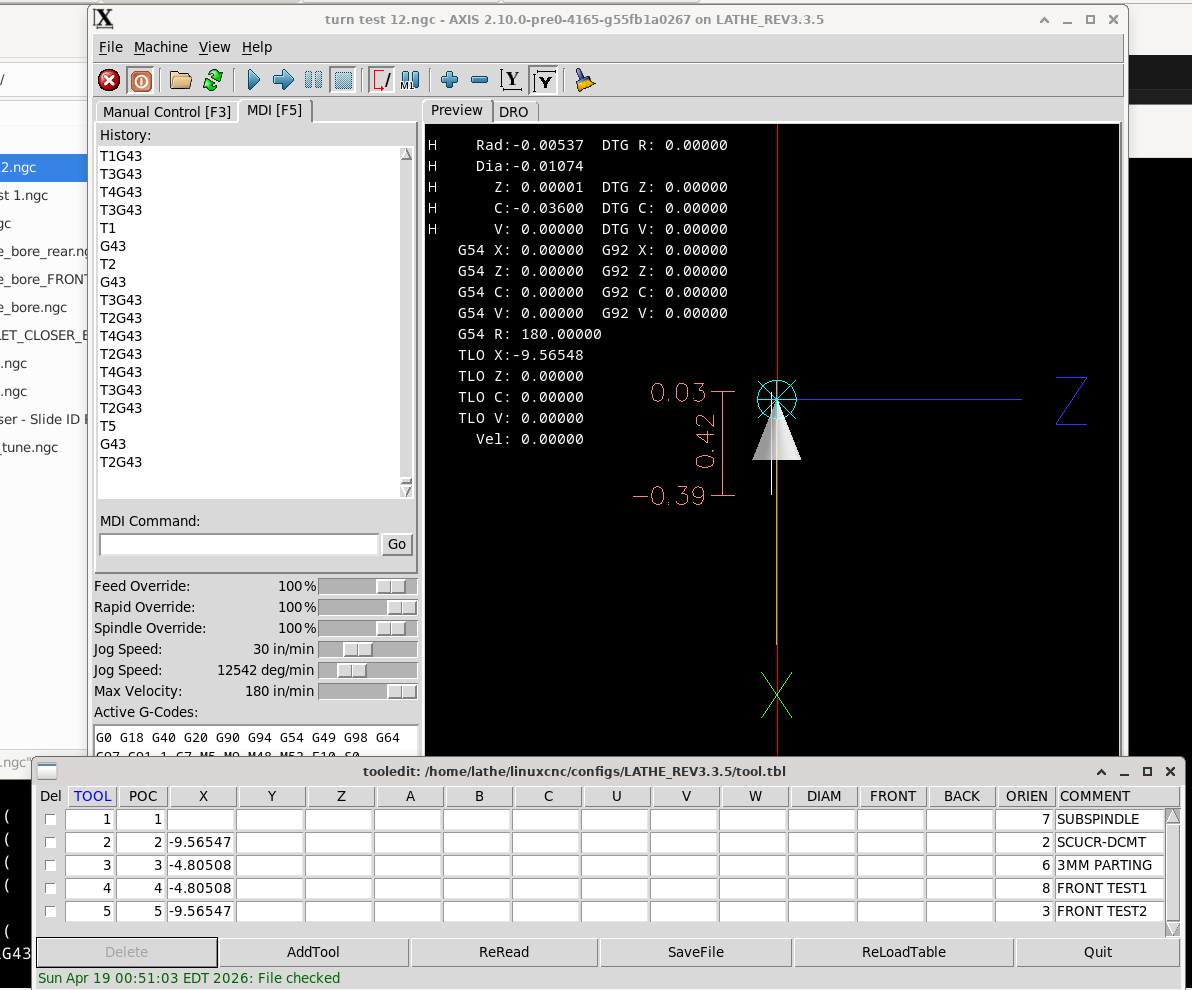
Replied by spumco on topic REMAP: gang lathe tool orientation
REMAP: gang lathe tool orientation
Category: Advanced Configuration
- spumco
- spumco
19 Apr 2026 04:54
Replied by spumco on topic REMAP: gang lathe tool orientation
REMAP: gang lathe tool orientation
Category: Advanced Configuration
- emresensoy
- emresensoy
19 Apr 2026 00:54
Replied by emresensoy on topic CAM232 - 2.5 Axis CAM Software (First 2 Code Free, than 1$ for each)
CAM232 - 2.5 Axis CAM Software (First 2 Code Free, than 1$ for each)
Category: Show Your Stuff
- MaHa
- MaHa
19 Apr 2026 00:41
- andypugh

18 Apr 2026 23:22
Replied by andypugh on topic Considering a Full Rewire on a Working Schaublin 125 CNC
Considering a Full Rewire on a Working Schaublin 125 CNC
Category: Turning
- emresensoy
- emresensoy
18 Apr 2026 20:40
Replied by emresensoy on topic CAM232 - 2.5 Axis CAM Software (First 2 Code Free, than 1$ for each)
CAM232 - 2.5 Axis CAM Software (First 2 Code Free, than 1$ for each)
Category: Show Your Stuff

- tommylight

18 Apr 2026 20:29
Replied by tommylight on topic CAM232 - 2.5 Axis CAM Software (First 2 Code Free, than 1$ for each)
CAM232 - 2.5 Axis CAM Software (First 2 Code Free, than 1$ for each)
Category: Show Your Stuff
- emresensoy
- emresensoy
18 Apr 2026 20:23
CAM232 - 2.5 Axis CAM Software (First 2 Code Free, than 1$ for each) was created by emresensoy
CAM232 - 2.5 Axis CAM Software (First 2 Code Free, than 1$ for each)
Category: Show Your Stuff
- rodw

18 Apr 2026 19:12 - 18 Apr 2026 19:13
- COFHAL
- COFHAL
18 Apr 2026 18:09
Replied by COFHAL on topic NativeCAM 2.0b — Python 3 & GTK3 port for LinuxCNC 2.9 / Debian 13 Trixie
NativeCAM 2.0b — Python 3 & GTK3 port for LinuxCNC 2.9 / Debian 13 Trixie
Category: NativeCAM
- papagno-source
- papagno-source
18 Apr 2026 17:20
Replied by papagno-source on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
- endian

18 Apr 2026 17:10
Replied by endian on topic LinuxCNC and Beckhoff AX5000 servo drives
LinuxCNC and Beckhoff AX5000 servo drives
Category: EtherCAT
- axemas

18 Apr 2026 17:00
Replied by axemas on topic NativeCAM 2.0b — Python 3 & GTK3 port for LinuxCNC 2.9 / Debian 13 Trixie
NativeCAM 2.0b — Python 3 & GTK3 port for LinuxCNC 2.9 / Debian 13 Trixie
Category: NativeCAM
- axemas
18 Apr 2026 16:55
Replied by axemas on topic NativeCAM 2.0b — Python 3 & GTK3 port for LinuxCNC 2.9 / Debian 13 Trixie
NativeCAM 2.0b — Python 3 & GTK3 port for LinuxCNC 2.9 / Debian 13 Trixie
Category: NativeCAM
Time to create page: 0.388 seconds