Search Results (Searched for: )
- tommylight

17 Apr 2026 19:44
Replied by tommylight on topic lcnc-suite — web UI for LinuxCNC
lcnc-suite — web UI for LinuxCNC
Category: Other User Interfaces
- andypugh

17 Apr 2026 19:42
Replied by andypugh on topic lcnc-suite — web UI for LinuxCNC
lcnc-suite — web UI for LinuxCNC
Category: Other User Interfaces
- andypugh
17 Apr 2026 19:27
Replied by andypugh on topic (Solved) FlexGUI - Multiple spindles?
(Solved) FlexGUI - Multiple spindles?
Category: Flex GUI
- mclien
- mclien
17 Apr 2026 19:23
Replied by mclien on topic retrofitting a Proxon for coin die milling
retrofitting a Proxon for coin die milling
Category: Milling Machines
- andypugh
17 Apr 2026 19:06
Replied by andypugh on topic REMAP: gang lathe tool orientation
REMAP: gang lathe tool orientation
Category: Advanced Configuration
- Sandro
- Sandro
17 Apr 2026 19:01
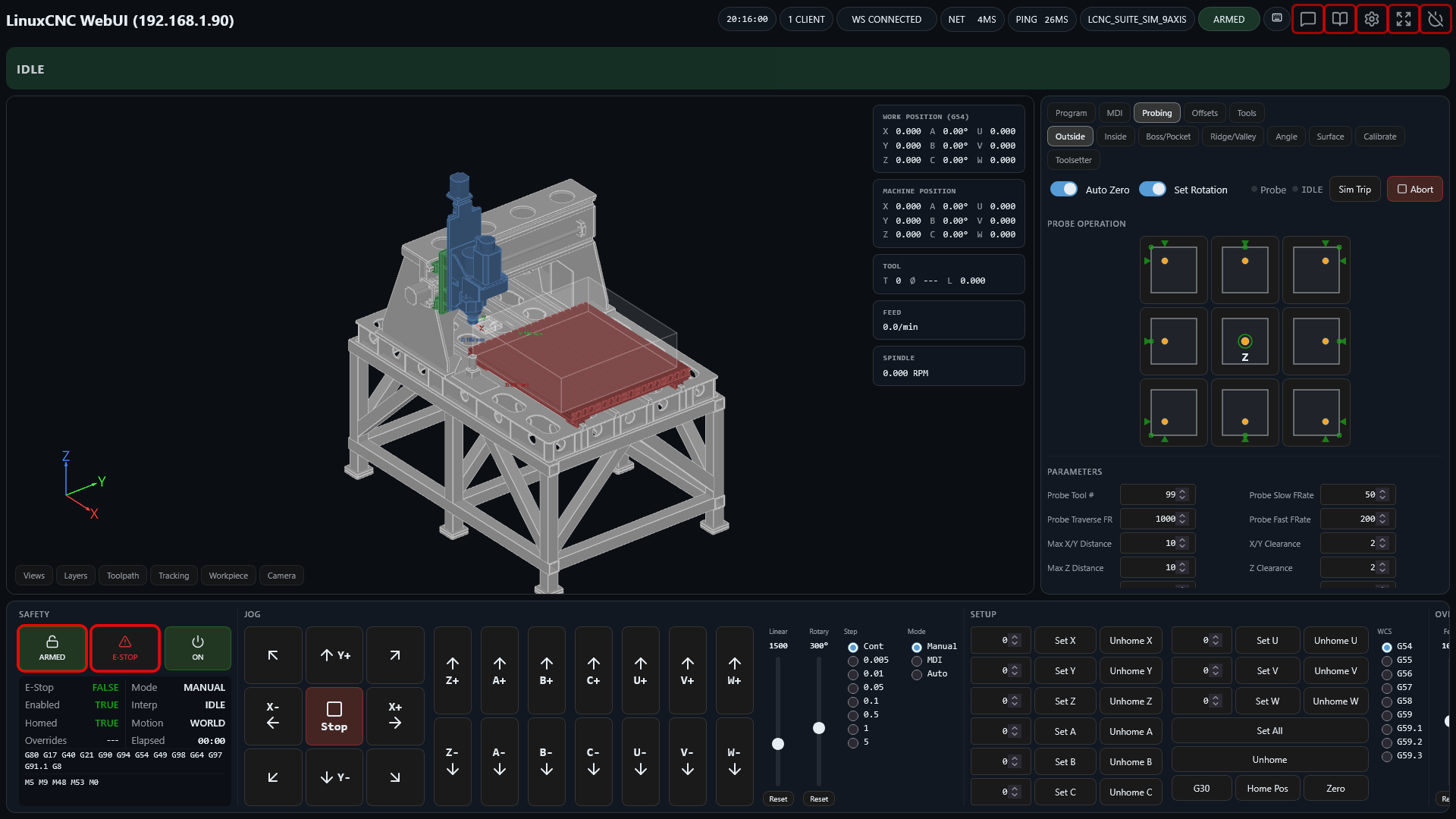
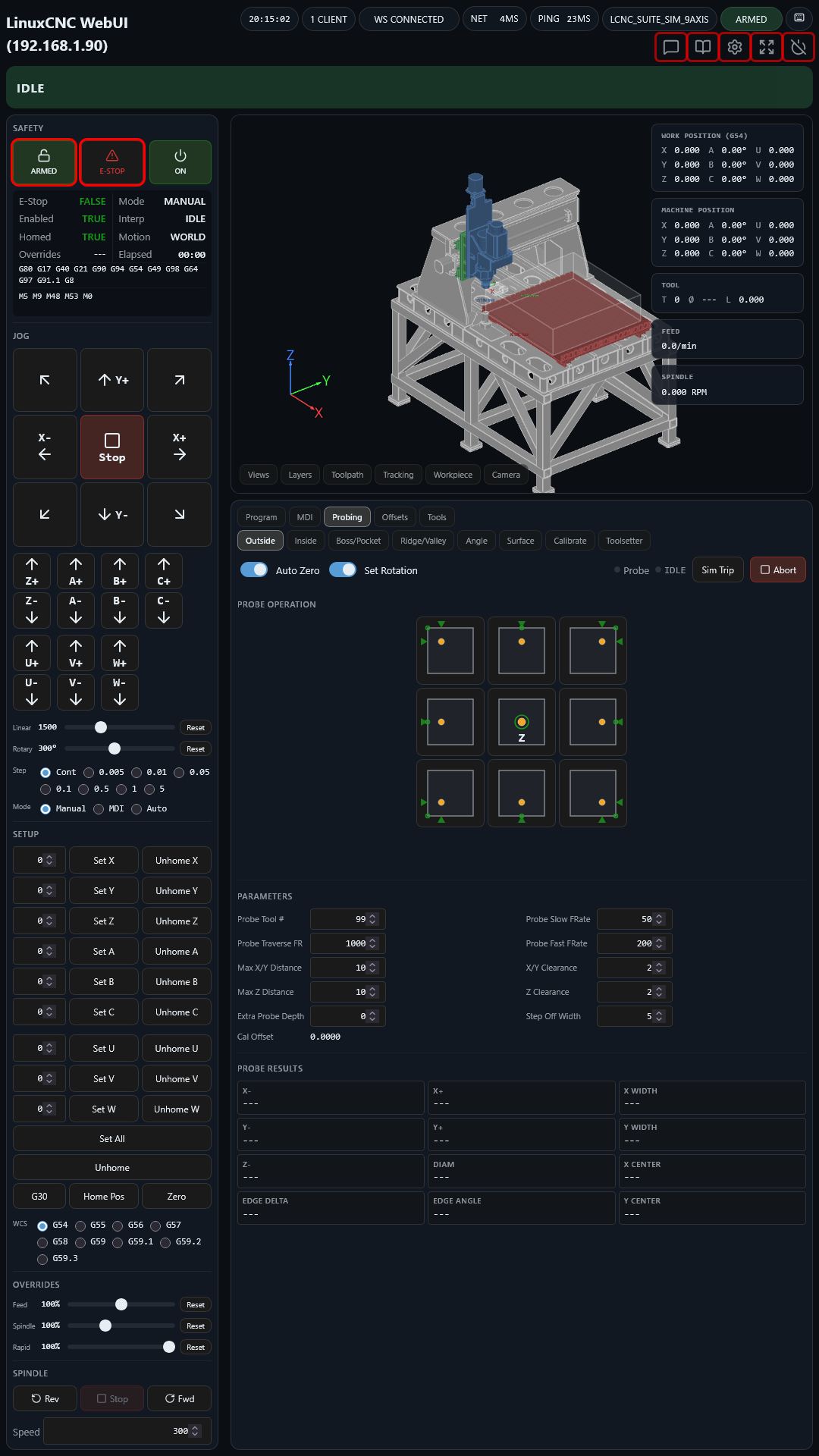
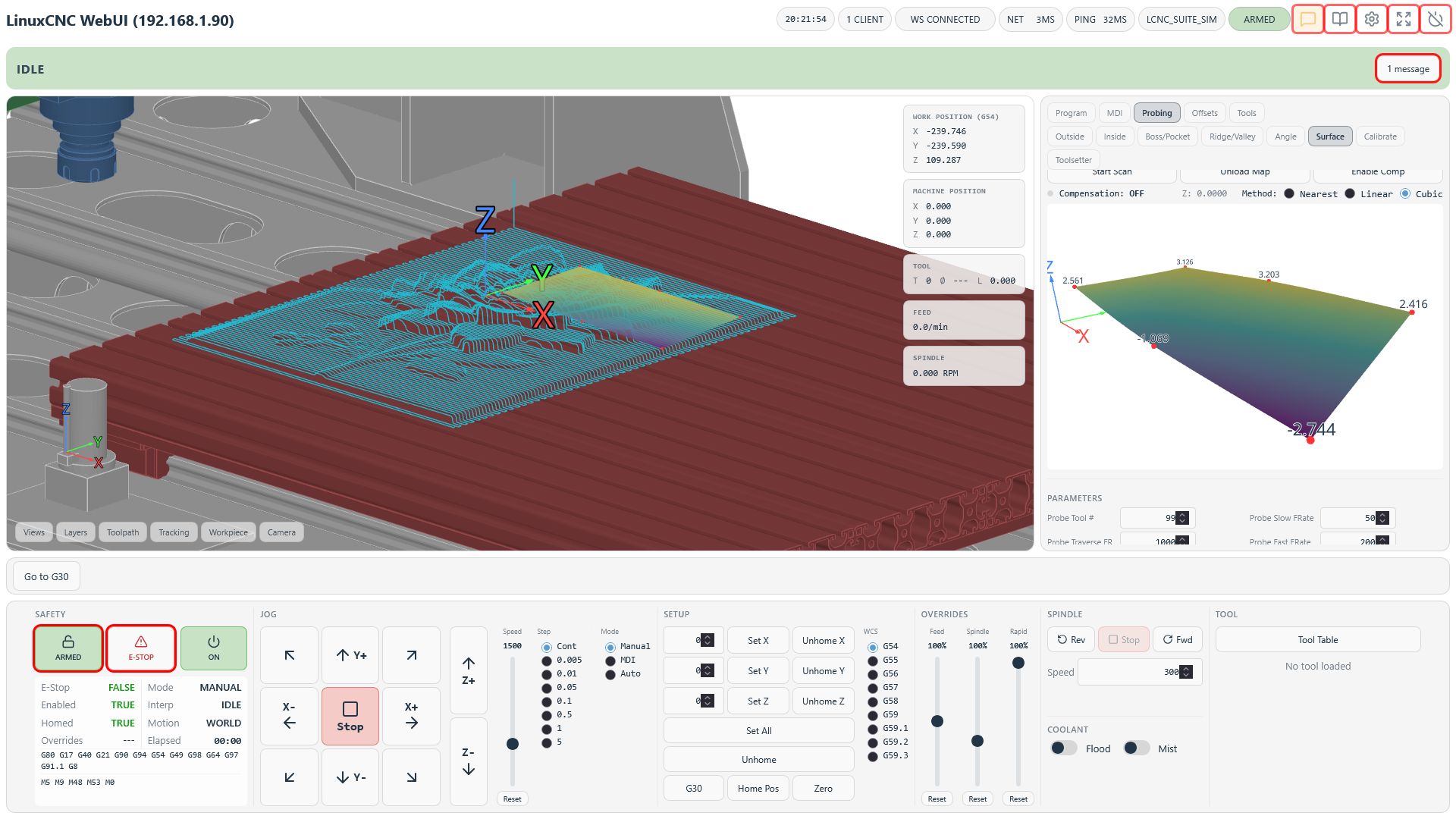
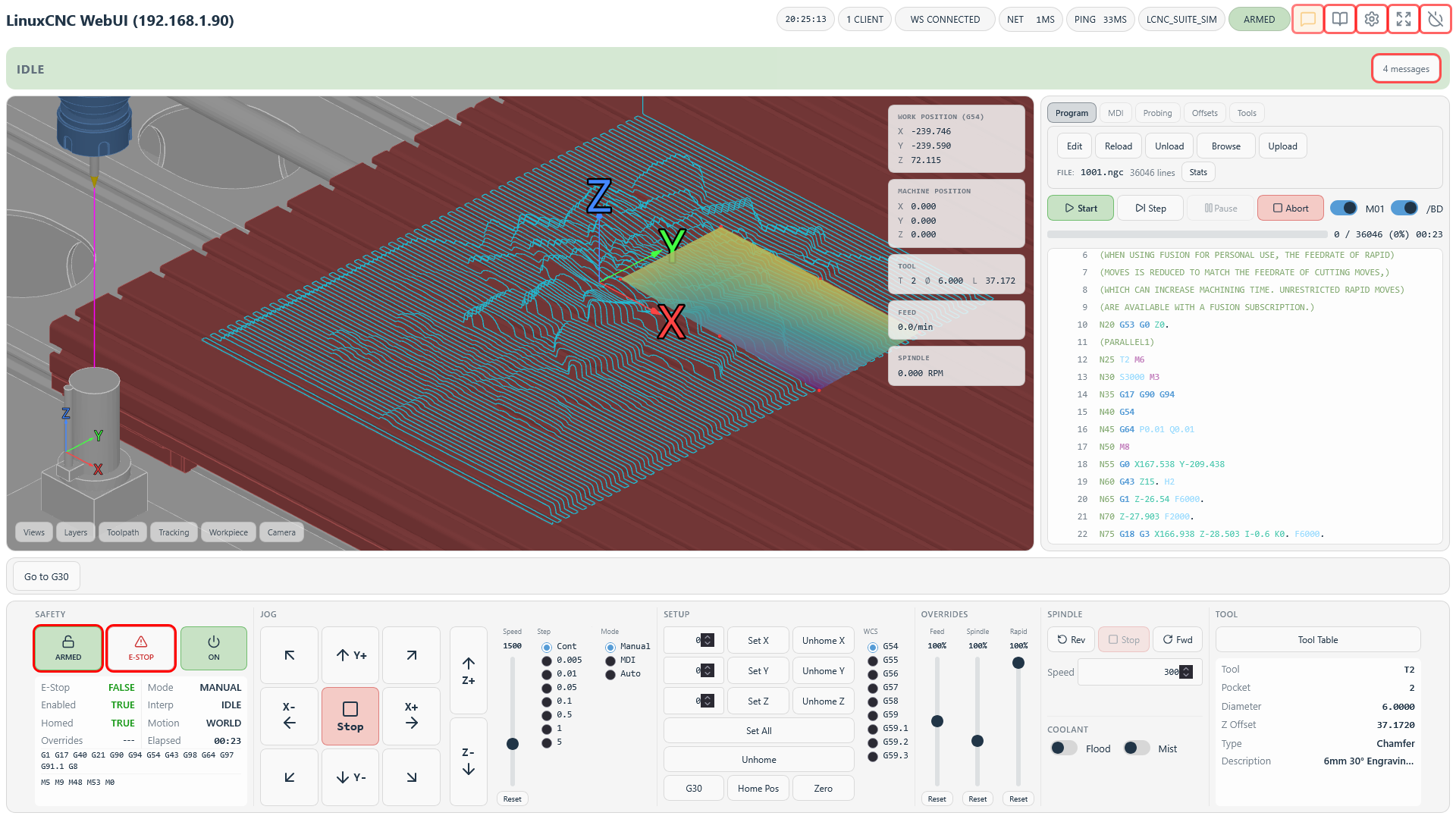
lcnc-suite — web UI for LinuxCNC was created by Sandro
lcnc-suite — web UI for LinuxCNC
Category: Other User Interfaces
- Dudelbert
- Dudelbert
17 Apr 2026 18:17
Replied by Dudelbert on topic Considering a Full Rewire on a Working Schaublin 125 CNC
Considering a Full Rewire on a Working Schaublin 125 CNC
Category: Turning
- andrax

17 Apr 2026 17:23
Replied by andrax on topic Sanitycheck my plan: ethercat + stepperonline A6
Sanitycheck my plan: ethercat + stepperonline A6
Category: EtherCAT
- RotarySMP

17 Apr 2026 17:22
Replied by RotarySMP on topic Retrofitting a 1986 Maho MH400E
Retrofitting a 1986 Maho MH400E
Category: Milling Machines
- Hakan
- Hakan
17 Apr 2026 16:48
- papagno-source
- papagno-source
17 Apr 2026 16:22 - 17 Apr 2026 16:37
Replied by papagno-source on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
- papagno-source
- papagno-source
17 Apr 2026 15:37
Replied by papagno-source on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
- motionmasterupgrade
- motionmasterupgrade
17 Apr 2026 13:52 - 17 Apr 2026 13:59
Replied by motionmasterupgrade on topic MotionMaster Upgrade
MotionMaster Upgrade
Category: General LinuxCNC Questions
- PCW

17 Apr 2026 13:51
Replied by PCW on topic Lathe C axis homing
Lathe C axis homing
Category: General LinuxCNC Questions
- grandixximo

17 Apr 2026 13:47
Replied by grandixximo on topic Ethercat random jitter fix
Ethercat random jitter fix
Category: EtherCAT
Time to create page: 0.377 seconds