Search Results (Searched for: )
- Hakan
- Hakan
05 Nov 2025 09:02
Replied by Hakan on topic MonoKrom - QtPyVCP GUI for PlasmaC and Mill
MonoKrom - QtPyVCP GUI for PlasmaC and Mill
Category: QtPyVCP
- mariusl

05 Nov 2025 08:46 - 05 Nov 2025 08:48
Replied by mariusl on topic USB activity causes network error
USB activity causes network error
Category: Plasmac
- unknown
- unknown
05 Nov 2025 08:13
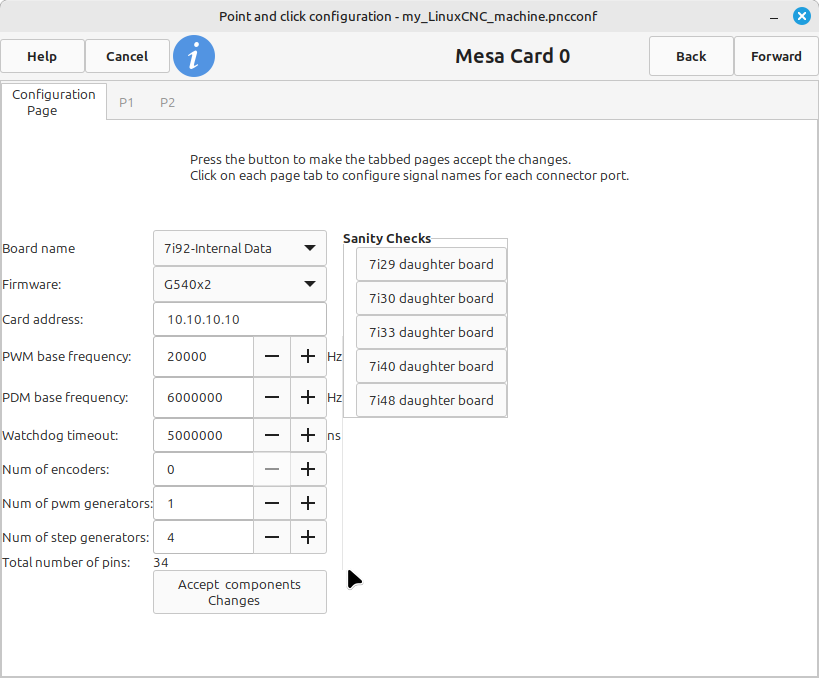
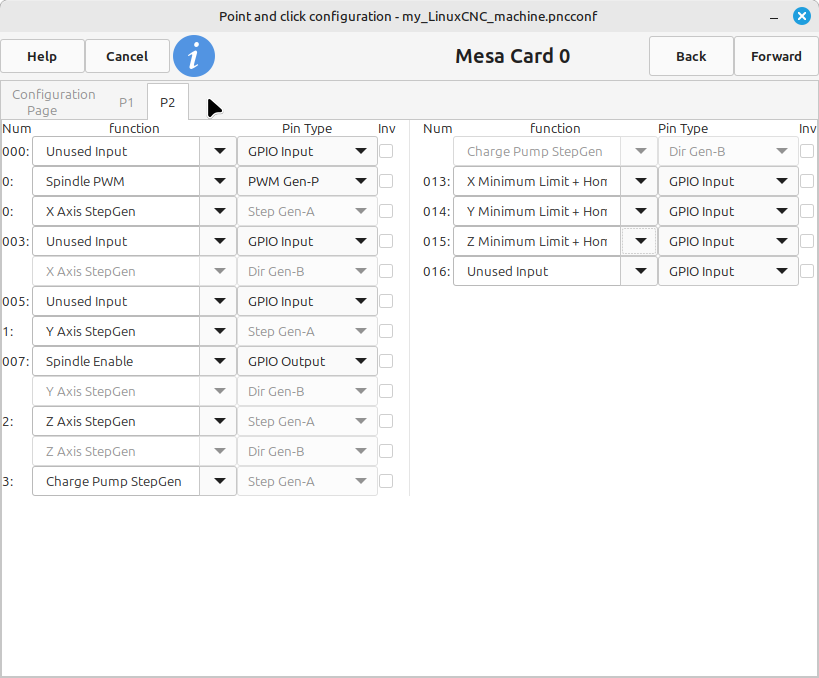
Replied by unknown on topic LinuxCNC + Mesa 7i92TF + Gecko G540. Docs are useless. Help, Please!
LinuxCNC + Mesa 7i92TF + Gecko G540. Docs are useless. Help, Please!
Category: PnCConf Wizard
- rodw

05 Nov 2025 08:02
Replied by rodw on topic MonoKrom - QtPyVCP GUI for PlasmaC and Mill
MonoKrom - QtPyVCP GUI for PlasmaC and Mill
Category: QtPyVCP
- Allie
- Allie
05 Nov 2025 07:58
Replied by Allie on topic Suggest RTAI version for me
Suggest RTAI version for me
Category: General LinuxCNC Questions
- rodw
05 Nov 2025 07:50
Replied by rodw on topic USB activity causes network error
USB activity causes network error
Category: Plasmac
- rodw
05 Nov 2025 07:32
- auric
- auric
05 Nov 2025 06:44
- PCW

05 Nov 2025 06:19 - 05 Nov 2025 06:22
- SvenRSA
- SvenRSA
05 Nov 2025 06:17
Replied by SvenRSA on topic proudly presenting a Maho MH700 retrofit ..
proudly presenting a Maho MH700 retrofit ..
Category: CNC Machines
- mariusl
05 Nov 2025 06:00 - 05 Nov 2025 06:01
Replied by mariusl on topic USB activity causes network error
USB activity causes network error
Category: Plasmac
- SvenRSA
- SvenRSA
05 Nov 2025 05:15
Replied by SvenRSA on topic Maho 700C A-axis (rotating table)
Maho 700C A-axis (rotating table)
Category: General LinuxCNC Questions
- unknown
- unknown
05 Nov 2025 04:48
Replied by unknown on topic LinuxCNC + Mesa 7i92TF + Gecko G540. Docs are useless. Help, Please!
LinuxCNC + Mesa 7i92TF + Gecko G540. Docs are useless. Help, Please!
Category: PnCConf Wizard
- ihavenofish
- ihavenofish
05 Nov 2025 03:26
Replied by ihavenofish on topic Mini wannabe datron build
Mini wannabe datron build
Category: CNC Machines
- Lcvette

05 Nov 2025 03:10 - 05 Nov 2025 03:11
Replied by Lcvette on topic Probe basic error exceeding axis negative value during calibration
Probe basic error exceeding axis negative value during calibration
Category: QtPyVCP
Time to create page: 0.608 seconds