Search Results (Searched for: )
- tommylight

17 Oct 2025 19:38
Replied by tommylight on topic Update LinuxCNC 2.9.5 on debian 13
Update LinuxCNC 2.9.5 on debian 13
Category: Installing LinuxCNC
Must do:first, then try installing.
sudo apt update- snowgoer540

17 Oct 2025 19:24
Replied by snowgoer540 on topic No underspeed with temporary material
No underspeed with temporary material
Category: Plasmac
Found my invoice it was $110 in 2020. Quite the jump.
- f355

17 Oct 2025 18:25
Replied by f355 on topic Update LinuxCNC 2.9.5 on debian 13
Update LinuxCNC 2.9.5 on debian 13
Category: Installing LinuxCNC
Thank you for fixing this, Andy, the new key works just fine!
However, the debian package itself seems to have a broken python3 dependency. I'm on the latest Raspberry Pi OS Lite (which is basically trixie with a custom kernel and a few Pi-specific tools installed). Any particular reason for the arm64 package to want python3 < 3.12? amd64 one depends on 3.13, and so does linuxcnc-uspace 2.9.4 that comes with trixie.
However, the debian package itself seems to have a broken python3 dependency. I'm on the latest Raspberry Pi OS Lite (which is basically trixie with a custom kernel and a few Pi-specific tools installed). Any particular reason for the arm64 package to want python3 < 3.12? amd64 one depends on 3.13, and so does linuxcnc-uspace 2.9.4 that comes with trixie.
$ sudo apt-get install linuxcnc-uspace
Reading package lists... Done
Building dependency tree... Done
Reading state information... Done
Solving dependencies... Error!
Some packages could not be installed. This may mean that you have
requested an impossible situation or if you are using the unstable
distribution that some required packages have not yet been created
or been moved out of Incoming.
The following information may help to resolve the situation:
The following packages have unmet dependencies:
linuxcnc-uspace : Depends: python3 (< 3.12) but 3.13.5-1 is to be installed
Depends: libboost-python1.74.0 (>= 1.74.0+ds1) but it is not installable
Depends: libboost-python1.74.0-py311 but it is not installable
Depends: libgpiod2 (>= 1.5.1) but it is not installable
Depends: libpython3.11 (>= 3.11.0) but it is not installable
Recommends: linuxcnc-doc-en but it is not going to be installed or
linuxcnc-doc
Recommends: librsvg2-dev but it is not going to be installed
Recommends: hostmot2-firmware-all but it is not installable
Recommends: python3-pil but it is not going to be installed
Recommends: python3-pil.imagetk but it is not going to be installed
E: Unable to correct problems, you have held broken packages.
E: The following information from --solver 3.0 may provide additional context:
Unable to satisfy dependencies. Reached two conflicting decisions:
1. linuxcnc-uspace:arm64=1:2.9.6 is selected for install
2. linuxcnc-uspace:arm64=1:2.9.6 Depends python3 (< 3.12)
but none of the choices are installable:
[no choices] - PanikEspoir
- PanikEspoir
17 Oct 2025 18:05
Replied by PanikEspoir on topic Terminated with an error, I'm begging for help
Terminated with an error, I'm begging for help
Category: General LinuxCNC Questions
There were some electric issues due to an electric storm.
Thanks for the reply.
Thanks for the reply.
- unknown
- unknown
17 Oct 2025 17:42
Replied by unknown on topic Step By Step Help Needed . EL8 Leadshine to PI 5
Step By Step Help Needed . EL8 Leadshine to PI 5
Category: EtherCAT
Waveshare do an add ethernet adaptor that connects via the pcie bus, they also do one that has a Nvme drive and an ethernet adaptor.
The Odroids have Realtek adapters, so there's that to think about, but I didn't have any issues although I did install the dkms drivers. Then again the Odroid has Nvme and sata ports built in, so no extra $$$ in that respect.
The N100 with Intel hardware sounds like worthy advice. Decisions decisions.
The Odroids have Realtek adapters, so there's that to think about, but I didn't have any issues although I did install the dkms drivers. Then again the Odroid has Nvme and sata ports built in, so no extra $$$ in that respect.
The N100 with Intel hardware sounds like worthy advice. Decisions decisions.
- unknown
- unknown
17 Oct 2025 17:30 - 17 Oct 2025 17:32
Replied by unknown on topic Is there a new Linuxcnc release in the wings ?
Is there a new Linuxcnc release in the wings ?
Category: General LinuxCNC Questions
Everything has been pretty well documented within the package lists and in the commit messages.
I thought a backport would be a package that is in eg Trixie that was been repackaged for Bookworm.
TBH the extra packages may be pulling in too much extra stuff, the ISO weighs in at about 4.1G, which I think is due to suggested packages being installed as well. And TBH I've only included them to make transferring files around a little easier whilst testing. Like I said it's experimentation ATM, whether it's any use upstream I don't know.
Not even going to bother to upload to Google drive and ask for any help testing as it was a waste of time. I guess people are busy.
I thought a backport would be a package that is in eg Trixie that was been repackaged for Bookworm.
TBH the extra packages may be pulling in too much extra stuff, the ISO weighs in at about 4.1G, which I think is due to suggested packages being installed as well. And TBH I've only included them to make transferring files around a little easier whilst testing. Like I said it's experimentation ATM, whether it's any use upstream I don't know.
Not even going to bother to upload to Google drive and ask for any help testing as it was a waste of time. I guess people are busy.
- PCW

17 Oct 2025 17:19
Replied by PCW on topic Terminated with an error, I'm begging for help
Terminated with an error, I'm begging for help
Category: General LinuxCNC Questions
Were any changes made in the machine?
If you have both Yellow LEDs illuminated, that means power is probably OK
Other possible issues:
1. Cabling from the 5I25/6I25 to the 7I76
2. 7I76 Field voltage too low (check with a voltmeter)
3. Jumpering changed? (correct = 7I76 W1 and W3 LEFT)
4. Bad 5I25/6I25 or wrong firmware (again was anything changed?)
5. Bad 7I76
If you have both Yellow LEDs illuminated, that means power is probably OK
Other possible issues:
1. Cabling from the 5I25/6I25 to the 7I76
2. 7I76 Field voltage too low (check with a voltmeter)
3. Jumpering changed? (correct = 7I76 W1 and W3 LEFT)
4. Bad 5I25/6I25 or wrong firmware (again was anything changed?)
5. Bad 7I76
- Will_cnc
- Will_cnc
17 Oct 2025 17:15
Replied by Will_cnc on topic Step By Step Help Needed . EL8 Leadshine to PI 5
Step By Step Help Needed . EL8 Leadshine to PI 5
Category: EtherCAT
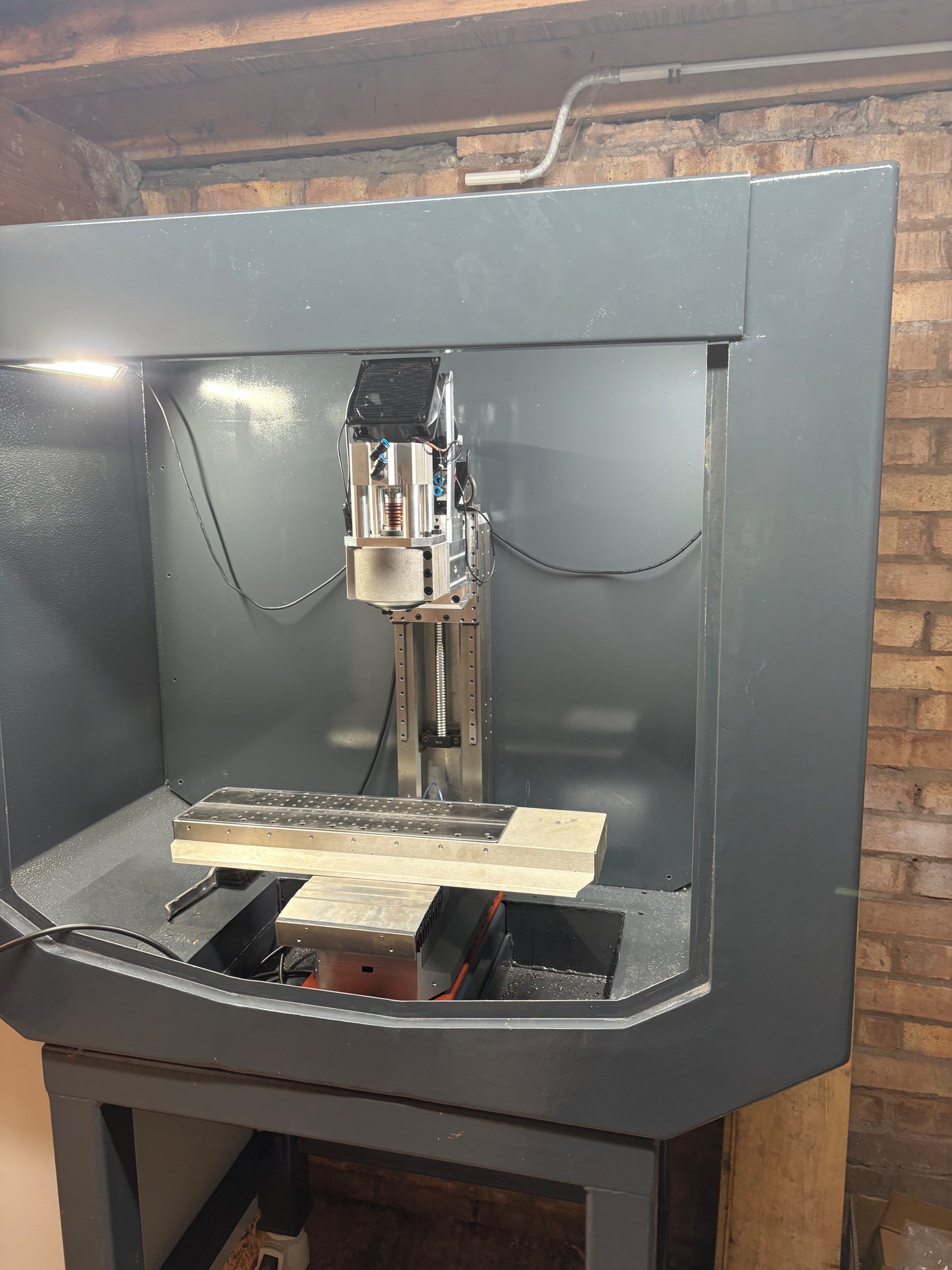
Thank you for the suggestions on what to use for the spindle motor. For now, I’ve replaced the spindle motor with another servo motor that is CiA402 compliant. I haven’t set it up yet, as I’ve been building an enclosure to suit and recently started back at university.
Disclaimer: The machine has been set up using the instructions kindly shared by Shemj.
Probe Basic Machine Interface Issues
1. Unable to home the machine
When I try to use the on-screen buttons to either home the machine or move to the work zero position, nothing happens. Is there something I might be missing in the setup?
this could be to do with the always_homed and homecomp files ? 2. Machine losing position after power-off
When I power off the controller and machine, I expect it to retain its position thanks to the battery backup on the drives. However, when I power it back on, each axis resets to zero instead of remembering its last position. Could this be related to the homing module setup? 3. Lack of continuous jogging in Probe Basic
In other interfaces, there’s an option to jog either continuously or incrementally. Does Probe Basic only support incremental jogging, or is there a way to enable continuous jogging that I’ve overlooked?
Thanks will
Photo:
Here’s a photo showing the start of the enclosure build — it’s still a work in progress.
When I try to use the on-screen buttons to either home the machine or move to the work zero position, nothing happens. Is there something I might be missing in the setup?
this could be to do with the always_homed and homecomp files ? 2. Machine losing position after power-off
When I power off the controller and machine, I expect it to retain its position thanks to the battery backup on the drives. However, when I power it back on, each axis resets to zero instead of remembering its last position. Could this be related to the homing module setup? 3. Lack of continuous jogging in Probe Basic
In other interfaces, there’s an option to jog either continuously or incrementally. Does Probe Basic only support incremental jogging, or is there a way to enable continuous jogging that I’ve overlooked?
Thanks will
Photo:
Here’s a photo showing the start of the enclosure build — it’s still a work in progress.
- PanikEspoir
- PanikEspoir
17 Oct 2025 16:20
Replied by PanikEspoir on topic Terminated with an error, I'm begging for help
Terminated with an error, I'm begging for help
Category: General LinuxCNC Questions
It has two little lights on
- juergen-home
- juergen-home
17 Oct 2025 16:19

Replied by juergen-home on topic hal file for gamepad pendant with retrofitted 12-position selector switch
hal file for gamepad pendant with retrofitted 12-position selector switch
Category: HAL Examples
- juergen-home
- juergen-home
17 Oct 2025 16:09





Replied by juergen-home on topic hal file for gamepad pendant with retrofitted 12-position selector switch
hal file for gamepad pendant with retrofitted 12-position selector switch
Category: HAL Examples
- juergen-home
- juergen-home
17 Oct 2025 16:05
hal file for gamepad pendant with retrofitted 12-position selector switch was created by juergen-home
hal file for gamepad pendant with retrofitted 12-position selector switch
Category: HAL Examples
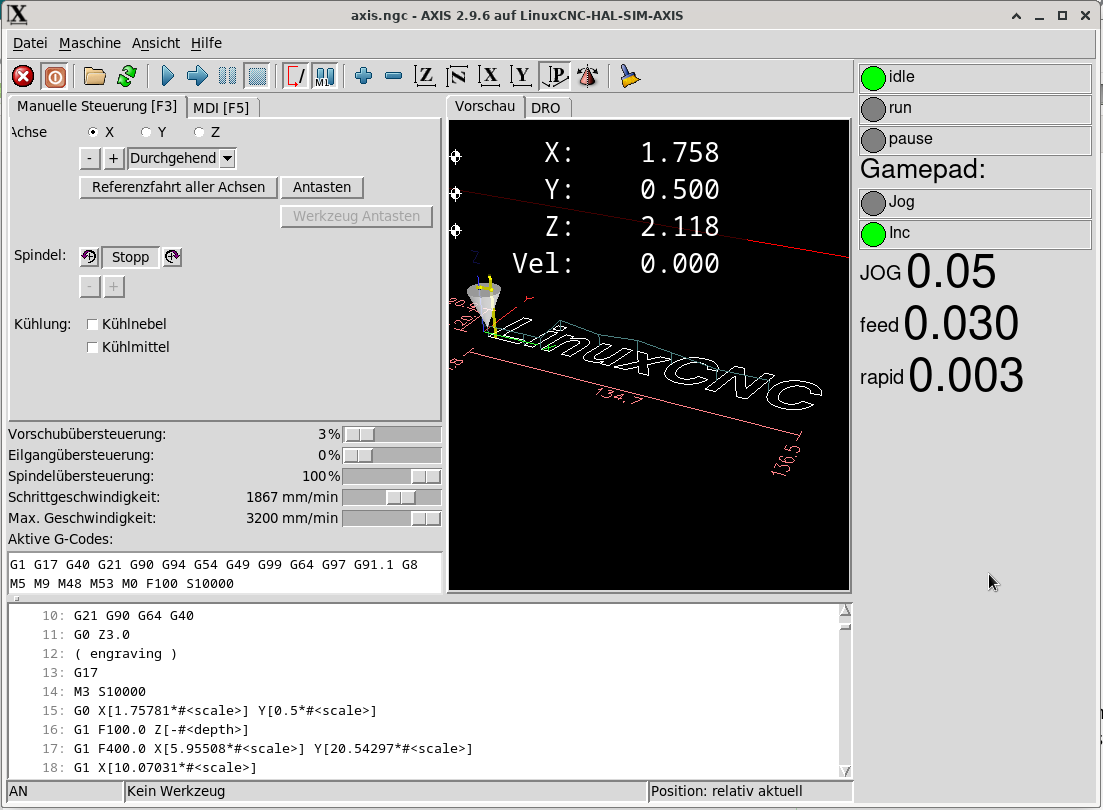
hal file for gamepad with retrofitted 12-position selector switch
# use special version of toggle2nist: www.forum.linuxcnc.org/24-hal-components...ton-at-the-same-time
# ALPS encoder EC18AGA20402
# Simple gamepad as a pendant
# Jogging (axes): Buttons 1–4, 11–12 control X, Y, Z motion (+/−).
# Feed Controls: Buttons 9, 10 adjust program feed override +1 / -1.
# Feed Controls: Encoder: inputs (6, 8) (17, 19) adjust program feed override in predefined steps
# Program Control: Buttons 13–16 manage stop, pause, start, and mist-coolant.
# Mode Selection: Encoder: inputs (6, 8) (17, 19) set jog/increment steps via `mux16` and `lut5` for maual jog.

# use special version of toggle2nist: www.forum.linuxcnc.org/24-hal-components...ton-at-the-same-time
# ALPS encoder EC18AGA20402
# Simple gamepad as a pendant
# Jogging (axes): Buttons 1–4, 11–12 control X, Y, Z motion (+/−).
# Feed Controls: Buttons 9, 10 adjust program feed override +1 / -1.
# Feed Controls: Encoder: inputs (6, 8) (17, 19) adjust program feed override in predefined steps
# Program Control: Buttons 13–16 manage stop, pause, start, and mist-coolant.
# Mode Selection: Encoder: inputs (6, 8) (17, 19) set jog/increment steps via `mux16` and `lut5` for maual jog.
# ttm_a for linuxcnc 2.9.6 AXIS GUI 2025-10-17 encoder 16
# use special version of toggle2nist: forum.linuxcnc post 05 Oct 2025 18:50 #335873 special toggle2nist.comp with "pulse-length" mode from Aciera
# https://www.forum.linuxcnc.org/24-hal-components/57307-toggle2nist-hangs-when-pressing-an-other-button-at-the-same-time
# https://www.forum.linuxcnc.org/media/kunena/attachments/25994/toggle2nist.comp
# sudo halcompile --install toggle2nist.comp
# +joging while not homed
# +ALPS encoder functionality prepared
# ALPS encoder functionality functional
# override prepered with Max-velocity
# override with Feed Override + Rapid Override
# suppress error messages when pressing 1 2 3 4 11 12 start.. while halui.program.is-running / halui.program.is-paused
# short circuit one unused analog button to detect if analog is on
# Jogging (axes): Buttons 1–4, 11–12 control X, Y, Z motion (+/−).
# Feed Controls: Buttons 9, 10 adjust program feed override +1 / -1.
# Feed Controls: Encoder: inputs (6, 8) (17, 19) adjust program feed override in predefined steps
# Program Control: Buttons 13–16 manage stop, pause, start, and mist-coolant.
# Mode Selection: Encoder: inputs (6, 8) (17, 19) set jog/increment steps via `mux16` and `lut5` for maual jog.
# =================================================================================
# Analog LED on the gamepad has to be switched on, otherwise it is not working as intended.
# Furthermore when analog is not on it will e-stop on switching on. If analog is switched off while
# program is running it will e-stop when program is stoped.
# =================================================================================
# hal file for a simple usb gamepad.
# do not trust this .hal file until you tested it yourself under save conditions.
# this code contain traces of code from smarter people than me.
# For easier integration with my other .hal files components are loaded in "loadrt or2 names=or2_0a" format
#For testing in sim.axis I switch "TWOPASS = on" as follow: (axis_mm.ini)
#[HAL]
#TWOPASS = on
#HALFILE = core_sim.hal
#HALFILE = sim_spindle_encoder.hal
#->#HALFILE = axis_manualtoolchange.hal
#HALFILE = simulated_home.hal
#->#HALFILE = cooling.hal
#HALFILE = gamepad.hal
#POSTGUI_HALFILE = postguihalfile2.hal
# https://linuxcnc.org/docs/html/man/man9/
# https://linuxcnc.org/docs/html/hal/components.html
# ---------------------------------------------------------------
# $ less /proc/bus/input/devices --> usb device name "USB Gamepad"
# To use the next line the proper device must be plugged in or it will fail
# IF your machine have to run without the gamepad comment out the gamepad.hal in the machines ini file.
# generic china
loadusr -W hal_input -KRAL USB Gamepad
#loadusr -W hal_input -KRAL USB Logitech Logitech Dual Action
# RF generic china
#loadusr -W hal_input -KRAL Twin USB Joystick Twin USB Joystick
# NOTE: LinuxCNC 2.9 renames btn-joystick to btn-trigger.
# ---------------------------------------------------------------
# analog LED must be ON: only 2 inputs are usable with buttons.
# position: joystick left hand
# input.0.abs-x-is-neg
# input.0.abs-x-is-pos not usable (poti swich to +)
# input.0.abs-y-is-neg
# input.0.abs-y-is-pos not usable (poti swich to +)
# analog LED must be ON: only 2 inputs are usable with buttons.
#
# position: joystick right hand
# input.0.abs-rz-is-neg
# input.0.abs-rz-is-pos not usable (poti swich to +)
# input.0.abs-z-is-neg
# input.0.abs-z-is-pos not usable (poti swich to +)
# analog LED must be ON: max 2 input buttons in one corner on at the same time are working.
# 2 input buttons in opposite (r+l) will not work, more than 2 input buttons at the same time will not work.
# position: 4 cross buttons left hand
#input.0.abs-hat0x-is-pos
#input.0.abs-hat0x-is-neg
#input.0.abs-hat0y-is-pos
#input.0.abs-hat0y-is-neg
# Gamepad USB:
# 01 input.0.btn-trigger 1 y+ direction
# 02 input.0.btn-thumb 2 x+ direction
# 03 input.0.btn-thumb2 3 y- direction
# 04 input.0.btn-top 4 x- direction
# 05 input.0.abs-hat0y-is-pos left-cross top not usable (only 2 out of 4 at the same time)
# 06 input.0.abs-hat0x-is-pos left-cross right incr1 mux16/lut5
# 07 input.0.abs-hat0x-is-neg left-cross left not usable (only 2 out of 4 at the same time)
# 08 input.0.abs-hat0y-is-neg left-cross bottom incr3 mux16/lut5
# 09 input.0.btn-base left2 feed 1% -
# 10 input.0.btn-top2 left1 feed 1% +
# 11 input.0.btn-base2 right2 z- direction
# 12 input.0.btn-pinkie right1 z+ direction
# 13 input.0.btn-base5 button left (3d-print) E-Stop
# 14 input.0.btn-base6 button right (3d-print) pause
# 15 input.0.btn-base3 select toggle coolant-mist
# 16 input.0.btn-base4 start start/home all
# 17 input.0.abs-x-is-neg joystick left hand incr0 mux16/lut5
# 18 input.0.abs-x-is-pos joystick left hand not usable (poti swich to +)
# 19 input.0.abs-y-is-neg joystick left hand incr2 mux16/lut5
# 20 input.0.abs-y-is-pos joystick left hand not usable (poti swich to +)
# 21 input.0.abs-rz-is-neg joystick right hand analog-on
# 22 input.0.abs-rz-is-pos joystick right hand not usable (poti swich to +)
# 23 input.0.abs-z-is-neg joystick right hand free
# 24 input.0.abs-z-is-pos joystick right hand not usable (poti swich to +)
#┌────────────────────────────────────────────────┐
#│ ┌─────┐ front ┌─────┐ │
#│ │ 9 │ <--bottom--> │ 11 │ │
#│ └─────┘ └─────┘ │
#│ ┌─────┐ front ┌─────┐ │
#│ │ 10 │ <--top--> │ 12 │ │
#│ └─────┘ select start └─────┘ │
#│ 5 15 16 1 │
#│ │
#│ 8 6 17 21 4 2 │
#│ ┌────┐ ┌────┐ │
#│ 7 20│ 13 │18 24│ 14 │22 3 │
#│ └────┘ └────┘ │
#│ 19 23 │
#└────────────────────────────────────────────────┘
# example how to change increment
# set jog increment to 1
#setp halui.axis.x.increment 0.1
# example how to change jog-speed
# set jog speed to 100 jog-speed
#setp halui.axis.jog-speed 100
#Buttons to net (if we want to use a button for more than 1 function)
net net-input-base6 input.0.btn-base6
net net-input-0-btn-base input.0.btn-base
#---------------------
# Software-based estop (13)
#---------------------
#net net-estop input.0.btn-base5 => halui.estop.activate # button estop
#---------------------
#---------------------
# Program Stop (13)
net net-stop1 input.0.btn-base5 => halui.program.stop
#---------------------
#---------------------
# when analog mode is not on
#---------------------
# for detecting this, there is a bridge soldered in for input.0.abs-rz-is-neg
# while input.0.abs-rz-is-neg is the same as input.0.btn-top (x- direction) if analog mode is off the x-axis is running x-direction all the time
# so we have to prevent this state with immediately e-stop when no program is running or e-stop when a running program stops.
# let the program run for the case analog is switched off by accidentely so the work is not lost.
# by this you can not even switch on the machine when analog is off.
# if you have a better solution let me know.
#---------------------
loadrt and2 names=and2_analog,and2_analog_p_run,and2_analog_p_run_not
addf and2_analog servo-thread
addf and2_analog_p_run servo-thread
addf and2_analog_p_run_not servo-thread
loadrt not names=not_analog
addf not_analog servo-thread
loadrt message names=analog,analog_alert messages="gamepad: switch on analog,gamepad: switch on analog or machine will e-stop if program is stopped"
addf analog servo-thread
addf analog_alert servo-thread
setp analog.edge 1
setp analog_alert.edge 1
loadrt edge names=edge_clear_msg
addf edge_clear_msg servo-thread
setp edge_clear_msg.both 0
setp edge_clear_msg.in-edge 0
setp edge_clear_msg.out-width-ns 100000000
net net-analog-in input.0.abs-rz-is-neg => not_analog.in # signal from gamepdad
net net-analog-on-not <= not_analog.out # inverse signal from gamepdad
net net-analog-in edge_clear_msg.in # impulse for clear messages when analog is switched on
net net-edge-clear-msg edge_clear_msg.out # impulse for clear messages when analog is switched on
# if analog is not on and machine is switched on message is triggered
net net-analog-on-not and2_analog.in0
net net-analog-on-not1 and2_analog.in1 <= halui.machine.is-on
net net-analog and2_analog.out => analog.trigger #message to GUI Axis
# if analog is not on and no prog. is running do e-stop
net net-programm-is-on-not and2_analog_p_run_not.in0
net net-analog and2_analog_p_run_not.in1
net met-analog-p-run-not-out and2_analog_p_run_not.out halui.estop.activate # e-stop if analog not active
# if analog is not on and prog. is running message2 is triggered
net net-programm-is-on and2_analog_p_run.in0
net net-analog-on-not and2_analog_p_run.in1
net net-analog-p-run-out and2_analog_p_run.out => analog_alert.trigger #message to GUI Axis
# this is for clearing messages. clearing code is in the postguihalfile2.hal
loadrt or2 names=or2-clear-messages # for postguihalfile2.hal clear message
addf or2-clear-messages servo-thread # for postguihalfile2.hal clear message
#---------------------
#---------------------
# Program Start (start when homed / home when not homed) / clear all messages in axix gui
#---------------------
loadrt and2 names=and_home
addf and_home servo-thread
loadrt not names=not_homed
addf not_homed servo-thread
# if not homed: home all axis when pressing the start button
net net-homed not_homed.in <= halui.joint.0.is-homed # homed
net net-not-homed not_homed.out and_home.in0 # when not homed
net net-start.button-pressed and_home.in1 # and start pressed
net net-home-all-now and_home.out halui.home-all # home all axis
# start program (when at least x-axis is homed, only x-axis is checked but start will fail if not all axis are homed)
loadrt and2 names=and_is_homed
addf and_is_homed servo-thread
loadrt and2 names=and_prog-11 #Load AND components for logical AND operations
addf and_prog-11 servo-thread # for start
net net-homed and_is_homed.in0 # when homed
net net-start.button-pressed input.0.btn-base4 # and start pressed
net net-start.button-pressed and_is_homed.in1 # and start pressed
net net-programm-is-on-not and_prog-11.in0 # dont start when program is already running to prevent error message
net net-programm-is-on-not11 and_prog-11.in1 and_is_homed.out
net net-run-prog and_prog-11.out => halui.program.run # start program
# ->postguihalfile2.hal: axisui.notifications-clear #clear all messages in axix gui
#---------------------
#---------------------
# Program Pause on/off
#---------------------
# known bugs: if you e-stop while pressing pause, than swich on and start program again, occasionally pause will not work.
# sometimes tog2nist_1.on stays on! --> only with original toggle2nist.comp
#loadrt toggle names=tog_1 # Load N components for logical NOT operations
#addf tog_1 servo-thread
loadrt toggle2nist names=tog2nist_1 # Load N components for logical NOT operations
addf tog2nist_1 servo-thread
# these 2 setp have to be commented out for regular toggle2nist.comp in 2.9.6
# setp tog2nist_1.debounce 2
setp tog2nist_1.pulse-length 50 # to prevent hanging tog2nist / forum.linuxcnc post 05 Oct 2025 18:50 #335873 special toggle2nist.comp from Aciera
# this toggle in front of toggle2nist is needed for regular toggle2nist.comp in 2.9.6
#net net-input-base6 => tog_1.in # this is the pause button
#net net-button-pause tog2nist_1.in <= tog_1.out
net net-input-base6 => tog2nist_1.in
net net-halui-program-is-paused halui.program.is-paused
net net-halui-program-is-paused tog2nist_1.is-on
net net-pause-off tog2nist_1.off => halui.program.resume
net net-pause-on tog2nist_1.on => halui.program.pause
#---------------------
#---------------------
# Coolant Signal
#---------------------
# with this 2 lines each coolant shows a checkbox in the axis ui
# this is normaly part of the machine.hal / here only for test in the SIM-HAL-AXIS
net coolant-mist <= iocontrol.0.coolant-mist
net coolant-flood <= iocontrol.0.coolant-flood
#---------------------
#----------------------------------------------------------------------------------------------------------
# Activate coolant / mist
#----------------------------------------------------------------------------------------------------------
# A single joypad button will start and stop the coolant.
# coolant on-off with toggle2nist
loadrt toggle names=tog_0 # Load N components for logical NOT operations
addf tog_0 servo-thread
loadrt toggle2nist names=tog2nist_0 # Load N components for logical NOT operations
addf tog2nist_0 servo-thread
# this toggle in front of toggle2nist is needed for regular toggle2nist.comp in 2.9.6
#net net-joy-mist-toggle tog_0.in <= input.0.btn-base3
#net net-button-start tog2nist_0.in <= tog_0.out
net net-button-start tog2nist_0.in <= input.0.btn-base3 # here is the button
net net-mist.is-on tog2nist_0.is-on <= halui.mist.is-on
net net-mist-off tog2nist_0.off => halui.mist.off
net net-mist-on tog2nist_0.on => halui.mist.on
#----------------------------------------------------------------------------------------------------------
#----------------------------------------------------------------------------------------------------------
# For jog without (before) homing - fixed jog-speed 500
#----------------------------------------------------------------------------------------------------------
# This is not properly working with the simulation. If you jog before homing with x+ or z- homing may fail.
# In my real machine it seems to work
# we have to use the net name "net-x-minus.jog" not the actual button name because we feed the botton to multiple inputs
# Before homing (if allowed) you jog joints. After homing you must jog axes.
setp halui.joint.jog-speed 500
net net-x-minus-jog => halui.joint.0.minus
net net-x-plus-jog => halui.joint.0.plus
net net-y-minus-jog => halui.joint.1.minus
net net-y-plus-jog => halui.joint.1.plus
net net-z-minus-jog => halui.joint.2.minus
net net-z-plus-jog => halui.joint.2.plus
#----------------------------------------------------------------------------------------------------------
# -----
# selection of incremental / jog values with (mux16)
# -----
# we use a 4 bit 12 position encoder here
loadrt mux16 names=mux_encoder # for 16 different incremental steps
addf mux_encoder servo-thread # add to the servo-thread so it can be used
#mux16.N.use-graycode bit in
#This signifies the input will use Gray code instead of binary. Gray code is a good choice when using physical switches because for each increment only one select input changes at a time.
#not used yet
# Define the gamepad inputs for selection of incremental / jog values
#
# alps gamepad net
# 2 input.0.abs-hat0x-is-pos incr1
#
# 4 input.0.abs-hat0y-is-neg incr3
# 5 COM
# 3 input.0.abs-y-is-neg incr2
# 1 input.0.abs-x-is-neg incr0
# buttons for the encoder
net incr0 input.0.abs-x-is-neg
net incr1 input.0.abs-hat0x-is-pos
net incr2 input.0.abs-y-is-neg
net incr3 input.0.abs-hat0y-is-neg
# connect the buttons with the multiplexer
net incr0 mux_encoder.sel0
net incr1 mux_encoder.sel1
net incr2 mux_encoder.sel2
net incr3 mux_encoder.sel3
# -----
# Set the 12 incremental step and jog values for the mux16 component
setp mux_encoder.in00 0 # off 0
setp mux_encoder.in01 0.01 # Increment 1
setp mux_encoder.in03 0.05 # Increment 2
setp mux_encoder.in02 0.1 # Increment 3
setp mux_encoder.in06 1 # Increment 4
setp mux_encoder.in07 10 # Jog 5
setp mux_encoder.in05 50 # Jog 6
setp mux_encoder.in04 100 # Jog 7
setp mux_encoder.in12 200 # Jog 8
setp mux_encoder.in13 500 # Jog 9
setp mux_encoder.in09 1000 # Jog 10
setp mux_encoder.in08 3000 # Jog 11
setp mux_encoder.in11 0 # Jog # not used
setp mux_encoder.in10 0 # Jog # not used
setp mux_encoder.in14 0 # Jog # not used
setp mux_encoder.in15 0 # Jog # not used
#---- if you want to use mux16grey code instead use this example:
# Set the 12 incremental step and jog values for the mux16 component use grey code
#setp mux_encoder.use-graycode 1
#setp mux_encoder.in00 0 # off 0
#setp mux_encoder.in01 0.01 # Increment 1
#setp mux_encoder.in02 0.05 # Increment 2
#setp mux_encoder.in03 0.1 # Increment 3
#setp mux_encoder.in04 1 # Increment 4
#setp mux_encoder.in05 10 # Jog 5
#setp mux_encoder.in06 50 # Jog 6
#setp mux_encoder.in07 100 # Jog 7
#setp mux_encoder.in08 200 # Jog 8
#setp mux_encoder.in09 500 # Jog 9
#setp mux_encoder.in10 0 # Jog # not used
#setp mux_encoder.in11 0 # Jog # not used
#setp mux_encoder.in12 0 # Jog # not used
#setp mux_encoder.in13 0 # Jog # not used
#setp mux_encoder.in14 1000 # Jog 10
#setp mux_encoder.in15 3000 # Jog 11
#----
# 4-Bit-
# Gray-Code
# 4321 16pos Switch position ALPS
# 0000 1 1
# 0001 2 2
# 0011 3 3
# 0010 4 4
# 0110 5 5
# 0111 6 6
# 0101 7 7
# 0100 8 8
# 1100 9 9
# 1101 10 10
# 1111 11
# 1110 12
# 1010 13
# 1011 14
# 1001 15 11
# 1000 16 12
net net-mux-encoder-out mux_encoder.out-f # the actual increment value
net net-mux-encoder-out => halui.axis.x.increment # the actual increment value to the axis
net net-mux-encoder-out => halui.axis.y.increment # the actual increment value to the axis
net net-mux-encoder-out => halui.axis.z.increment # the actual increment value to the axis
# ! The 4 bit 12 position ALPS ecoder uses GREY code
# Position
# (8) (4) (2) (1) GREY code LUT5
# decimal sel3 sel2 sel1 sel0 ALPS SW mux_encoder.out mux.in weight jog/incr
# 0 0 0 0 0 1 0 0 00 0x1
# 1 0 0 0 1 2 0.01 1 01 0x2 increment
# 2 0 0 1 0 4 0.1 3 02 0x4 increment
# 3 0 0 1 1 3 0.05 2 03 0x8 increment
# 4 0 1 0 0 8 200 7 04 0x10 jog
# 5 0 1 0 1 7 100 6 05 0x20 jog
# 6 0 1 1 0 5 1 4 06 0x40 increment
# 7 0 1 1 1 6 10 5 07 0x80 jog
# 8 1 0 0 0 12 50 11 08 0x100 jog
# 9 1 0 0 1 11 3000 10 09 0x200 jog
# 10 1 0 1 0 10
# 11 1 0 1 1 11
# 12 1 1 0 0 9 500 8 12 0x1000 jog
# 13 1 1 0 1 10 1000 9 13 0x2000 jog
# 14 1 1 1 0 14
# 15 1 1 1 1 15
# -----
# selection of when to jog-incremental and when to jog - with lut5 (look up tabel)
# -----
loadrt lut5 names=lut5_incr,lut5_jog # if we incr or jog
addf lut5_incr servo-thread # add to the servo-thread so it can be used
addf lut5_jog servo-thread # add to the servo-thread so it can be used
net incr0 lut5_incr.in-0
net incr1 lut5_incr.in-1
net incr2 lut5_incr.in-2
net incr3 lut5_incr.in-3
#--------------------------------------------------------
# LUT5 function for increment
# HEX DEZ
# dec Bit4 Bit3 Bit2 Bit1 Bit0 Weight Weight
# 1 0 0 0 0 1 0x2 2
# 2 0 0 0 1 0 0x4 4
# 3 0 0 1 0 0 0x8 8
# 6 0 0 1 1 0 0x40 64
# SUM=0x4E 78
#--------------------------------------------------------
setp lut5_incr.function 0x4E
net net-incr-true lut5_incr.out # indicates that we want to jog-incremental
net incr0 lut5_jog.in-0
net incr1 lut5_jog.in-1
net incr2 lut5_jog.in-2
net incr3 lut5_jog.in-3
#--------------------------------------------------------
# LUT5 function for jog
# HEX DEZ
#dec Bit4 Bit3 Bit2 Bit1 Bit0 Weight Weight
# 04 0 0 1 0 0 0x10 16
# 05 0 0 1 0 1 0x20 32
# 07 0 0 1 1 1 0x80 128
# 08 0 1 0 0 0 0x100 256
# 09 0 1 0 0 1 0x200 512
# 12 0 1 1 0 0 0x1000 4096
# 13 0 1 1 0 1 0x2000 8192
# SUM=0x33B0 13232
#--------------------------------------------------------
setp lut5_jog.function 0x33B0
net net-jog-true lut5_jog.out # indicates that we want to jog
#+++++++++++++++++++++++++++++
# Define a fixed jog speed value for the jog-incremental moves
loadrt constant names=fixed_jog_speed
addf fixed_jog_speed servo-thread
setp fixed_jog_speed.value 1000
#+++++++++++++++++++++++++++++
#+++++++++++++++++++++++++++++
# Use mux2 to choose jog speed source between fixed_jog_speed and mux_encoder output
loadrt mux2 names=mux_jog_speed # for 1 different incr-jog speeds
addf mux_jog_speed servo-thread # add to the servo-thread so it can be used
# Connect mux2 selection input
net net-incr-true => mux_jog_speed.sel # Select fixed jog speed when jog-incremental is active
# Connect mux2 inputs
net net-mux-encoder-out mux_jog_speed.in0 # Variable jog speed from mux_encoder (mux16)
net net-fixed-jog-speed fixed_jog_speed.out mux_jog_speed.in1 # Fixed jog-incremental speed from fixed_jog_speed
# Connect mux output to halui axis jog speed pin
net net-mux2-out mux_jog_speed.out => halui.axis.jog-speed # output of normal jog speed/ fixed jog speed
#+++++++++++++++++++++++++++++
#--feed control with +/- buttons ---------------------------------
#---------------------
# increase feed +1
#---------------------
#net net-vel-increase input.0.btn-top2 => halui.max-velocity.increase # with max-velocity
net net-vel-increase input.0.btn-top2 => halui.feed-override.increase # with feed-override
#---------------------
#---------------------
# decrease feed -1
#---------------------
#net net-input-0-btn-base => halui.max-velocity.decrease # with max-velocity
net net-input-0-btn-base => halui.feed-override.decrease # with feed-override
#---------------------
# -----
# selection of mux16_feed-override values with (mux16)
# -----
# we use a 4 bit 12 position encoder here
loadrt mux16 names=mux16_feed-override # for 16 different incremental steps
addf mux16_feed-override servo-thread # add to the servo-thread so it can be used
# Define the gamepad inputs for selection of incremental / jog values
#
# alps gamepad net
# 2 input.0.abs-hat0x-is-pos incr1
#
# 4 input.0.abs-hat0y-is-neg incr3
# 5 COM
# 3 input.0.abs-y-is-neg incr2
# 1 input.0.abs-x-is-neg incr0
# this is already done in the mux_encoder section
# buttons for the encoder
#net incr0 input.0.abs-x-is-neg
#net incr1 input.0.abs-hat0x-is-pos
#net incr2 input.0.abs-y-is-neg
#net incr3 input.0.abs-hat0y-is-neg
# connect the buttons with the multiplexer
net incr0 mux16_feed-override.sel0
net incr1 mux16_feed-override.sel1
net incr2 mux16_feed-override.sel2
net incr3 mux16_feed-override.sel3
# -----
# Set the values for the mux16 component feed-override
setp mux16_feed-override.in00 0 # 0 0%
setp mux16_feed-override.in01 1 # 1 1%
setp mux16_feed-override.in03 3 # 2 3%
setp mux16_feed-override.in02 10 # 3 10%
setp mux16_feed-override.in06 50 # 4 60%
setp mux16_feed-override.in07 100 # 5 100%
setp mux16_feed-override.in05 0 # 6 0%
setp mux16_feed-override.in04 0 # 7
setp mux16_feed-override.in12 0 # 8
setp mux16_feed-override.in13 0 # 9
setp mux16_feed-override.in09 0 # 10
setp mux16_feed-override.in08 0 # 11
setp mux16_feed-override.in11 0 # # not used
setp mux16_feed-override.in10 0 # # not used
setp mux16_feed-override.in14 0 # # not used
setp mux16_feed-override.in15 0 # # not used
# -----
# selection of rapid-override values with (mux16)
# -----
# we use a 4 bit 12 position encoder here
loadrt mux16 names=mux16_rapid-override # for 16 different incremental steps
addf mux16_rapid-override servo-thread # add to the servo-thread so it can be used
# Define the gamepad inputs for selection of incremental / jog values
#
# alps gamepad net
# 2 input.0.abs-hat0x-is-pos incr1
#
# 4 input.0.abs-hat0y-is-neg incr3
# 5 COM
# 3 input.0.abs-y-is-neg incr2
# 1 input.0.abs-x-is-neg incr0
# this is already done in the mux_encoder section
# buttons for the encoder
#net incr0 input.0.abs-x-is-neg
#net incr1 input.0.abs-hat0x-is-pos
#net incr2 input.0.abs-y-is-neg
#net incr3 input.0.abs-hat0y-is-neg
# connect the buttons with the multiplexer
net incr0 mux16_rapid-override.sel0
net incr1 mux16_rapid-override.sel1
net incr2 mux16_rapid-override.sel2
net incr3 mux16_rapid-override.sel3
# -----
# Set the values for the mux16 component rapid-override
# this values are smaller in the low percentage range to reduce the high rapid moves to a save level
setp mux16_rapid-override.in00 0 # 0 0%
setp mux16_rapid-override.in01 1 # 1 1%
setp mux16_rapid-override.in03 3 # 2 3%
setp mux16_rapid-override.in02 10 # 3 10%
setp mux16_rapid-override.in06 50 # 4 50%
setp mux16_rapid-override.in07 1000 # 5 100%
setp mux16_rapid-override.in05 0 # 6 0%
setp mux16_rapid-override.in04 0 # 7
setp mux16_rapid-override.in12 0 # 8
setp mux16_rapid-override.in13 0 # 9
setp mux16_rapid-override.in09 0 # 10
setp mux16_rapid-override.in08 0 # 11
setp mux16_rapid-override.in11 0 # # not used
setp mux16_rapid-override.in10 0 # # not used
setp mux16_rapid-override.in14 0 # # not used
setp mux16_rapid-override.in15 0 # # not used
# Override with max-velocity example
#setp halui.max-velocity.scale 0.01666666666 # divider for m/min values
#setp halui.max-velocity.direct-value 1 # use absolute velocity values
#net net-max-vel vel_encoder.out-s => halui.max-velocity.counts # use selected mux16 value
# we override with Feed Override + Rapid Override / 2 different mux16 for 2 different value selection
#halui.feed-override.direct-value bit in
setp halui.feed-override.direct-value 1 # uses the direct value, not a percentage
# halui.feed-override.scale float in
setp halui.feed-override.scale 0.01
#halui.feed-override.counts s32 in
net net-feed-override mux16_feed-override.out-s => halui.feed-override.counts # use selected mux16 value
#halui.feed-override.value float out
net net-feed-override.value <= halui.feed-override.value
# halui.rapid-override.direct-value bit in
setp halui.rapid-override.direct-value 1
# halui.rapid-override.scale float in
setp halui.rapid-override.scale 0.001 # scale 0.001 for finer granulation
# halui.rapid-override.counts s32 in
net net-rapid-override mux16_rapid-override.out-s => halui.rapid-override.counts # use selected mux16 value
#halui.rapid-override.value float out
net net-rapid-override.value <= halui.rapid-override.value
#--feed control end ---------------------------------
# --- detect if program is running or paused to prevent error messages when incidentally press buttons for jogging
# so jogging/ incremental-jogging is only commanded when no program is running or paused
# halui.program.is-running
# halui.program.is-paused
loadrt or2 names=or2-programm-is-on
addf or2-programm-is-on servo-thread
loadrt not names=not_on # Load N components for logical NOT operations
addf not_on servo-thread
net net-program.is-running or2-programm-is-on.in0 <= halui.program.is-running # program is running
net net-halui-program-is-paused or2-programm-is-on.in1 # program is paused
net net-programm-is-on or2-programm-is-on.out # program is running or paused
net net-programm-is-on not_on.in # program is running or paused
net net-programm-is-on-not <= not_on.out # program is not running or paused
#net net-programm-is-on-not <= halui.program.is-idle
loadrt and2 names=and_prog-0,and_prog-2,and_prog-4,and_prog-6,and_prog-8,and_prog-10 #Load AND components for logical AND operations
addf and_prog-0 servo-thread #(for x+)
addf and_prog-2 servo-thread
addf and_prog-4 servo-thread
addf and_prog-6 servo-thread
addf and_prog-8 servo-thread
addf and_prog-10 servo-thread #(for z-)
net net-programm-is-on-not and_prog-0.in0 # program is running or paused (for x+)
net net-programm-is-on-not and_prog-2.in0 # program is running or paused
net net-programm-is-on-not and_prog-4.in0 # program is running or paused
net net-programm-is-on-not and_prog-6.in0 # program is running or paused
net net-programm-is-on-not and_prog-8.in0 # program is running or paused
net net-programm-is-on-not and_prog-10.in0 # program is running or paused (for z-)
#+++++++++++++++++++++++++++++
# jog/jog-incremental the axis
#+++++++++++++++++++++++++++++
loadrt and2 names=and_incr_0,and_incr_1,and_incr_2,and_incr_3,and_incr_4,and_incr_5,and_incr_6,and_incr_7,and_incr_8,and_incr_9,and_incr_10,and_incr_11 # Load AND components for logical AND operations
addf and_incr_0 servo-thread
addf and_incr_1 servo-thread
addf and_incr_2 servo-thread
addf and_incr_3 servo-thread
addf and_incr_4 servo-thread
addf and_incr_5 servo-thread
addf and_incr_6 servo-thread
addf and_incr_7 servo-thread
addf and_incr_8 servo-thread
addf and_incr_9 servo-thread
addf and_incr_10 servo-thread
addf and_incr_11 servo-thread
#++++ program is on
# halui.program.is-running----|OR
# |OR─----net-programm-is-on ---|NOT---net-programm-is-on-not
# net-halui-program-is-paused----|OR
# net-programm-is-on-not──|AND
# |AND──input-0-btn-thumb
# input.0.btn-thumb─── |AND
#
#++++ X plus jog
# input-0-btn-thumb─|AND
# |AND──halui.axis.x.plus
# net-jog-true───|AND
#
#++++ X plus incremental
# input.0.btn-thumb───|AND
# |AND──halui.axis.x.increment-plus
# net-incr-true───|AND
#-------------------------------------------------------------------------------------------------------
# old version
#++++ X plus jog
#net net-x-plus-jog input.0.btn-thumb # button pressed input
#net net-x-plus-jog and_incr_0.in0 # if button is pressed
#net net-jog-true and_incr_0.in1 # and lut5_jog is true
#net net-x-plus-jog-out halui.axis.x.plus <= and_incr_0.out # then jog axis
#++++ X plus incremental
#net net-x-plus-jog and_incr_1.in0 # if button is pressed
#net net-incr-true and_incr_1.in1 # and lut5_incr is true
#net net-x-plus-incr-jog-out halui.axis.x.increment-plus <= and_incr_1.out # then jog-incremental axis
#++++ X plus jog
net net-programm-is-on-not1 and_prog-0.in1 input.0.btn-thumb # program is running or paused and button is pressed
net net-x-plus-jog and_prog-0.out #
net net-x-plus-jog and_incr_0.in0 #
net net-jog-true and_incr_0.in1 # and lut5_jog is true
net net-x-plus-jog-out halui.axis.x.plus <= and_incr_0.out # then jog axis
#++++ X plus incremental
net net-x-plus-jog and_incr_1.in0 # if button is pressed
net net-incr-true and_incr_1.in1 # and lut5_incr is true
net net-x-plus-incr-jog-out halui.axis.x.increment-plus <= and_incr_1.out # then jog-incremental axis
#++++ X minus jog
net net-programm-is-on-not2 and_prog-2.in1 input.0.btn-top
net net-x-minus-jog and_prog-2.out # button pressed input
net net-x-minus-jog and_incr_2.in0 # if button is pressed
net net-jog-true and_incr_2.in1 # and lut5_jog is true
net net-x-minus-jog-out halui.axis.x.minus <= and_incr_2.out # then jog axis
#++++ X minus incremental
net net-x-minus-jog and_incr_3.in0 # if button is pressed
net net-incr-true and_incr_3.in1 # and lut5_incr is true
net net-x-minus-incr-jog-out halui.axis.x.increment-minus <= and_incr_3.out # then jog-incremental axis
#-------------------------------------------------------------------------------------------------------
#++++ Y plus jog
net net-programm-is-on-not4 and_prog-4.in1 input.0.btn-trigger
net net-y-plus-jog and_prog-4.out # button pressed input
net net-y-plus-jog and_incr_4.in0 # if button is pressed
net net-jog-true and_incr_4.in1 # and lut5_jog is true
net net-y-plus-jog-out halui.axis.y.plus <= and_incr_4.out # then jog axis
#++++ Y plus incremental
net net-y-plus-jog and_incr_5.in0 # if button is pressed
net net-incr-true and_incr_5.in1 # and lut5_incr is true
net net-y-plus-incr-jog-out halui.axis.y.increment-plus <= and_incr_5.out # then jog-incremental axis
#++++ Y minus jog
net net-programm-is-on-not6 and_prog-6.in1 input.0.btn-thumb2
net net-y-minus-jog and_prog-6.out # button pressed input
net net-y-minus-jog and_incr_6.in0 # if button is pressed
net net-jog-true and_incr_6.in1 # and lut5_jog is true
net net-y-minus-jog-out halui.axis.y.minus <= and_incr_6.out # then jog axis
#++++ Y minus incremental
net net-y-minus-jog and_incr_7.in0 # if button is pressed
net net-incr-true and_incr_7.in1 # and lut5_incr is true
net net-y-minus-incr-jog-out halui.axis.y.increment-minus <= and_incr_7.out # then jog-incremental axis
#-------------------------------------------------------------------------------------------------------#
#++++ Z plus jog
net net-programm-is-on-not8 and_prog-8.in1 input.0.btn-pinkie
net net-z-plus-jog and_prog-8.out # button pressed input
net net-z-plus-jog and_incr_8.in0 # if button is pressed
net net-jog-true and_incr_8.in1 # and lut5_jog is true
net net-z-plus-jog-out halui.axis.z.plus <= and_incr_8.out # then jog axis
#++++ Z plus incremental
net net-z-plus-jog and_incr_9.in0 # if button is pressed
net net-incr-true and_incr_9.in1 # and lut5_incr is true
net net-z-plus-incr-jog-out halui.axis.z.increment-plus <= and_incr_9.out # then jog-incremental axis
#++++ Z minus jog
net net-programm-is-on-not10 and_prog-10.in1 input.0.btn-base2
net net-z-minus-jog and_prog-10.out # button pressed input
net net-z-minus-jog and_incr_10.in0 # if button is pressed
net net-jog-true and_incr_10.in1 # and lut5_jog is true
net net-z-minus-jog-out halui.axis.z.minus <= and_incr_10.out # then jog axis
#++++ Z minus incremental
net net-z-minus-jog and_incr_11.in0 # if button is pressed
net net-incr-true and_incr_11.in1 # and lut5_incr is true
net net-z-minus-incr-jog-out halui.axis.z.increment-minus <= and_incr_11.out# then jog-incremental axis
#-------------------------------------------------------------------------------------------------------
- DerKlotz
- DerKlotz
17 Oct 2025 16:00
Replied by DerKlotz on topic Combine Glade Togglebutton with Physical Input
Combine Glade Togglebutton with Physical Input
Category: GladeVCP
halui.machine.is-on is already linked to machine-is-on
I´ll continue tomorrow
I´ll continue tomorrow
- tommylight
17 Oct 2025 16:00
Replied by tommylight on topic Is there a new Linuxcnc release in the wings ?
Is there a new Linuxcnc release in the wings ?
Category: General LinuxCNC Questions
A: is it open source?
B: not even on backports?
C: never a good idea
D: List?
E: what file was included ?
B: not even on backports?
C: never a good idea
D: List?
E: what file was included ?
- tommylight
17 Oct 2025 15:52
Replied by tommylight on topic Terminated with an error, I'm begging for help
Terminated with an error, I'm begging for help
Category: General LinuxCNC Questions
From your error logDoes the 7i76 have field power connected?
RMM0705HZ.hal:30: Pin 'hm2_5i25.0.7i76.0.0.input-00' does not exist
Time to create page: 0.862 seconds