- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
- new2linux
- Offline
- Platinum Member
-

Less
More
- Posts: 711
- Thank you received: 9
05 May 2017 14:50 - 05 May 2017 17:25 #92706
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
This is the ini file, just trying to keep all in the same spot for reference.
many thanks!!
Edit: The duel loop, is the 2nd loop designed to limit the overshoot that is in question?
Depending on how important the "pid.n.error" is, other than the referenced (06 pic, in earlier thread) all other "pid.n.error" required "lower gain" to see on scope trace, so best yet I think.
many thanks!!
Edit: The duel loop, is the 2nd loop designed to limit the overshoot that is in question?
Depending on how important the "pid.n.error" is, other than the referenced (06 pic, in earlier thread) all other "pid.n.error" required "lower gain" to see on scope trace, so best yet I think.
Last edit: 05 May 2017 17:25 by new2linux. Reason: question&thought
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
07 May 2017 17:16 #92782
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Many thanks for all the great help!!
The following is the "x axes, the lighter one" hal trace, the 01 to 04 are FF2 in small increments. The inserted 05 has "P" to 3450, it that this to get "pis.n.error" down. There is enough stiffness at "P=2500", just fyi.
The one thing that seemed to me is that the "FF2" needs to be in the 1.0 range.
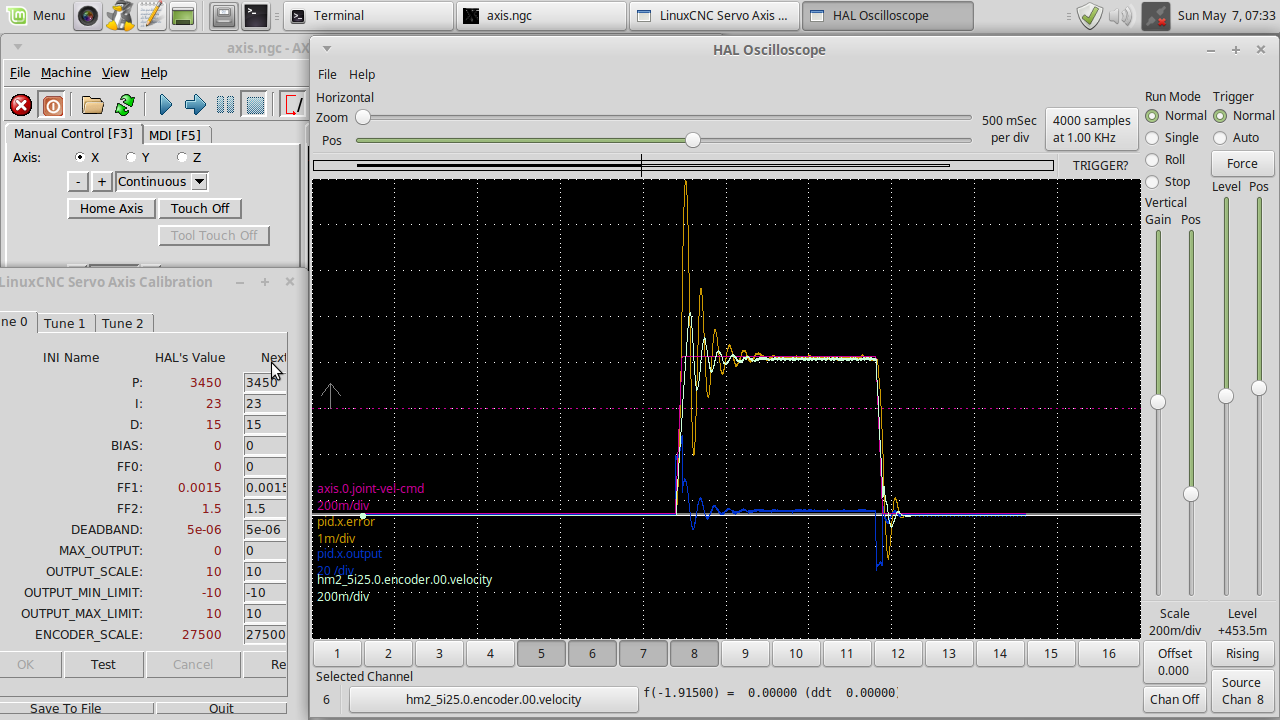
This is about as good as I know what to look for.
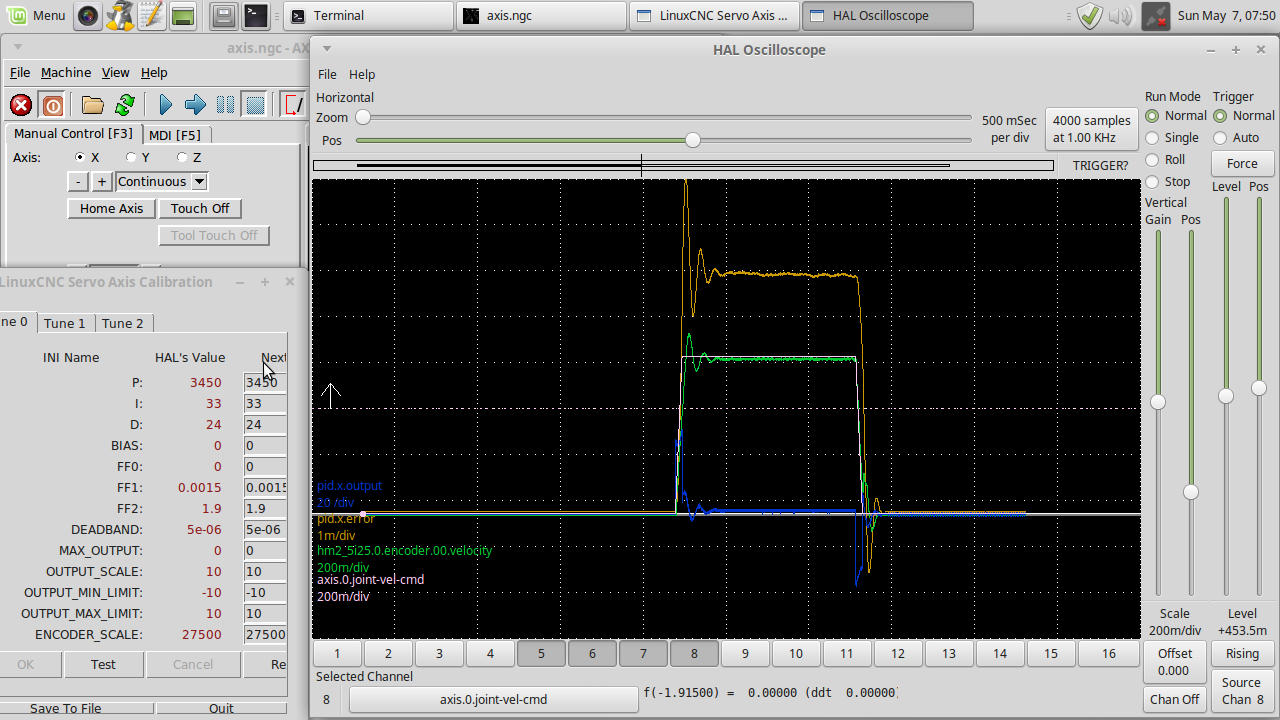
The ini file has .68 max-velocity & 17 max-acceleration. Jog at 60"/min, not shore this is correct, seems slow. Will try to post "y axes" next.
Many thanks!
The following is the "x axes, the lighter one" hal trace, the 01 to 04 are FF2 in small increments. The inserted 05 has "P" to 3450, it that this to get "pis.n.error" down. There is enough stiffness at "P=2500", just fyi.
The one thing that seemed to me is that the "FF2" needs to be in the 1.0 range.
This is about as good as I know what to look for.
The ini file has .68 max-velocity & 17 max-acceleration. Jog at 60"/min, not shore this is correct, seems slow. Will try to post "y axes" next.
Many thanks!
Please Log in or Create an account to join the conversation.
- tommylight
-

- Away
- Moderator
-

Less
More
- Posts: 21733
- Thank you received: 7425
07 May 2017 20:19 #92786
by tommylight
Replied by tommylight on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Just my experience, and that of course may vary, but FF2 has to be at least 10 to 100 times smaller than FF1, in most cases 0 is perfectly acceptable.
I am adding some more info to servo tuning thread that might help.
I am adding some more info to servo tuning thread that might help.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
07 May 2017 22:36 #92792
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
tommylight, thank you!
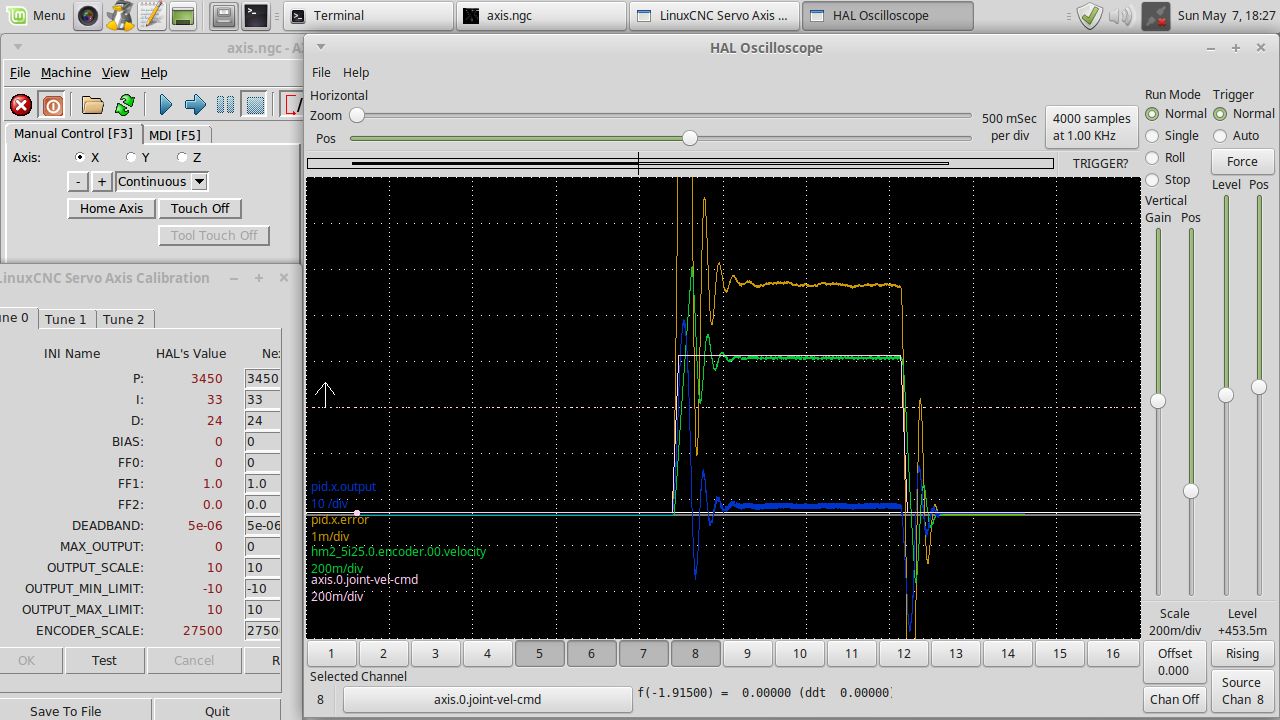
Attached are several screenshots with your suggestions, (I changed the scale on some) this is the best.

the others are described in the file name, somewhat.
many thanks!!
Attached are several screenshots with your suggestions, (I changed the scale on some) this is the best.
the others are described in the file name, somewhat.
many thanks!!
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21733
- Thank you received: 7425
07 May 2017 22:55 #92794
by tommylight
Replied by tommylight on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Can you please do a test with the following:
FF1 set at 1
FF2 set at 0
on the hal scope only, "joint.N.motor-pos-cmd" and "joint.N.f-error"
FF1 set at 1
FF2 set at 0
on the hal scope only, "joint.N.motor-pos-cmd" and "joint.N.f-error"
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
07 May 2017 23:34 #92796
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
tommylight, thank you!!
I have your suggestion saved as screenshot.
And then just the reversal.
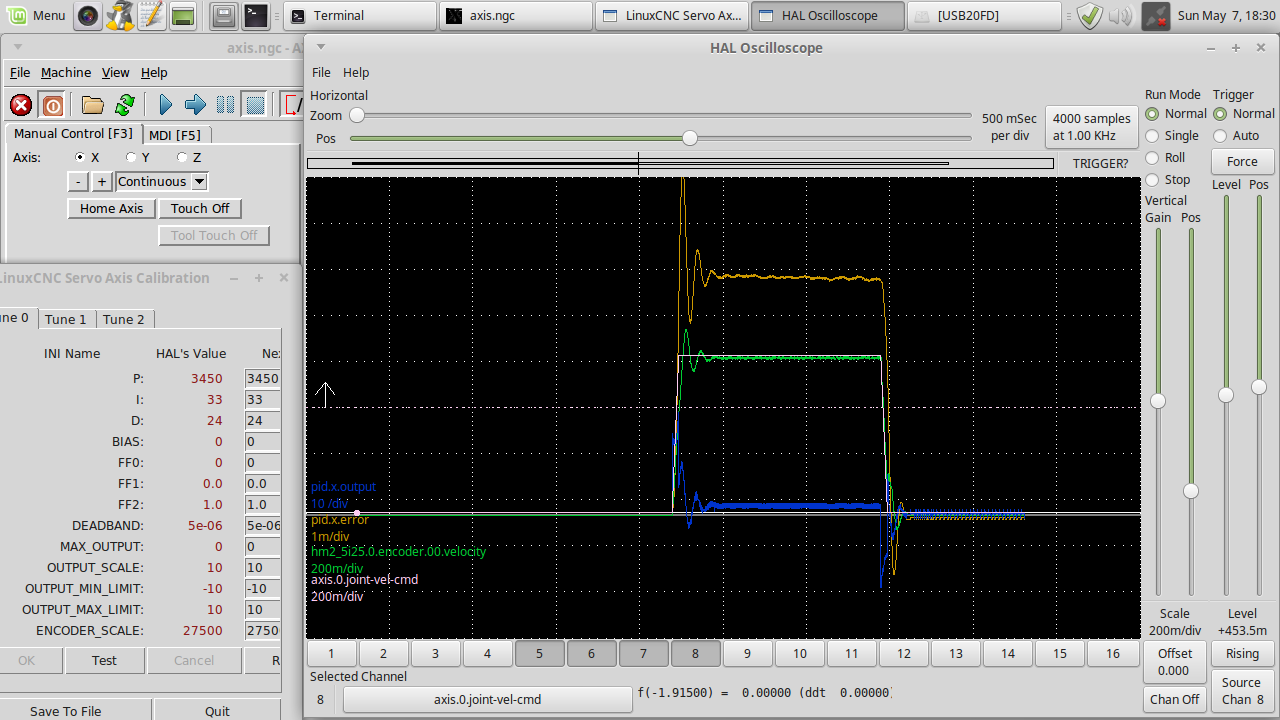
many thanks!!
I have your suggestion saved as screenshot.
And then just the reversal.
many thanks!!
Please Log in or Create an account to join the conversation.
- tommylight
-
- Away
- Moderator
-
Less
More
- Posts: 21733
- Thank you received: 7425
08 May 2017 00:19 #92798
by tommylight
I am following this thread from the begining, and i am alsmost certain something is not right in your setup, as has been mentioned by other members several times, becouse some parameters do not have any infuence on the system or the resulting hal scope. P value of over 3000 is something i have never seen, but it is posible. FF1 can be a lot of values, but as far as i remember 1 should be the maximum for a normal servo system. And there is the FF2...........it has to be in very low values or 0. On a tuned system changing FF2 value by a smal, like realy smal amount will mess up the tuning and triger an joint following error.
It is beyond me how can you still move the motors with an FF2 value of 3.7 ???????
Replied by tommylight on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Can you put only those 2 parameters on the halscope?
on the hal scope only, "joint.N.motor-pos-cmd" and "joint.N.f-error"
I am following this thread from the begining, and i am alsmost certain something is not right in your setup, as has been mentioned by other members several times, becouse some parameters do not have any infuence on the system or the resulting hal scope. P value of over 3000 is something i have never seen, but it is posible. FF1 can be a lot of values, but as far as i remember 1 should be the maximum for a normal servo system. And there is the FF2...........it has to be in very low values or 0. On a tuned system changing FF2 value by a smal, like realy smal amount will mess up the tuning and triger an joint following error.
It is beyond me how can you still move the motors with an FF2 value of 3.7 ???????
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
08 May 2017 12:03 #92811
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
thank you tommylight!!!
Attached are some screenshots as you requested. Could not find "joint.N.motor-pos-cmd", found only 2 with pos-cmd (the end), the one used was the only one to trigger using "normal" setting, hope this is ok.
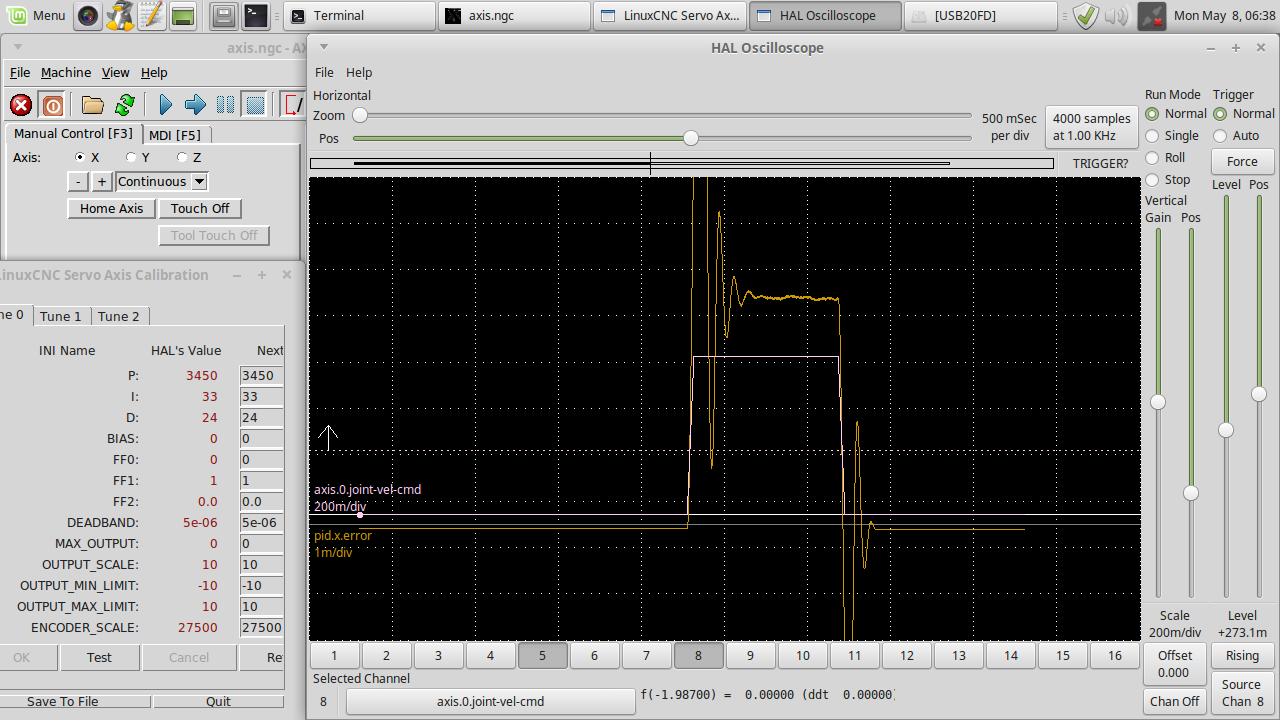
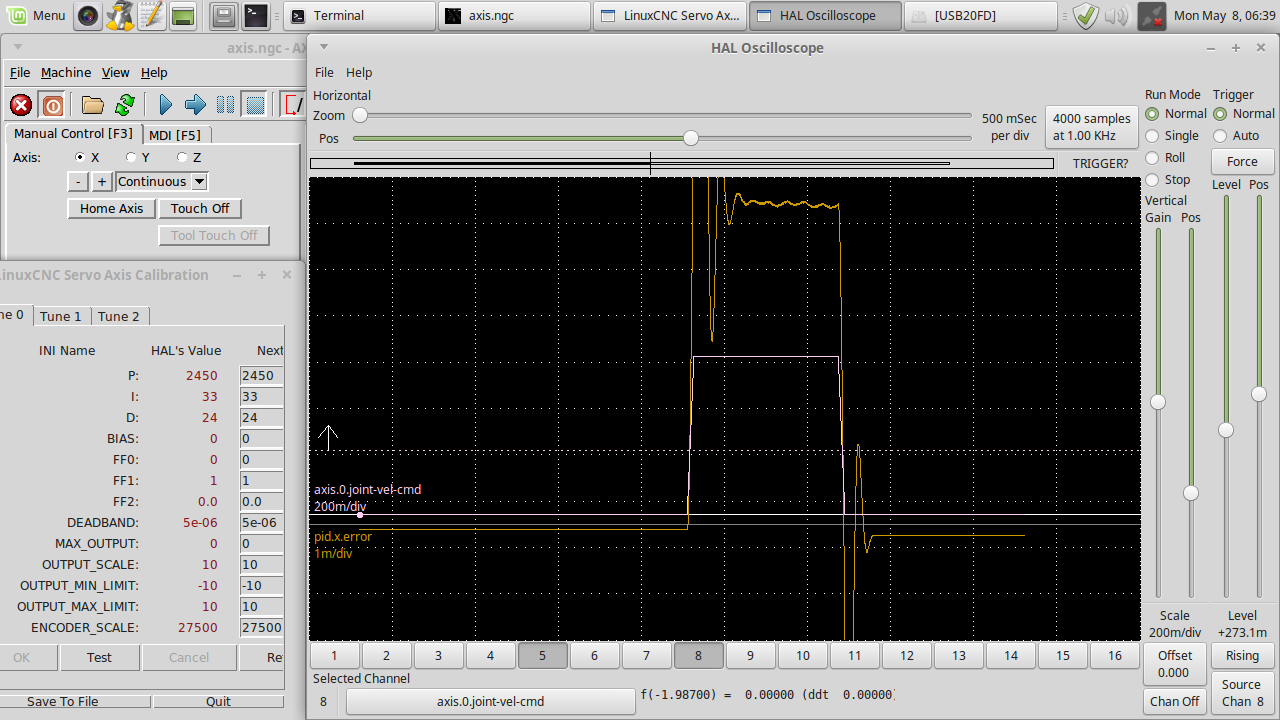
The file names tell the settings, take note P=2450 (all others P=3450) on last pic.
Many thanks!!
Attached are some screenshots as you requested. Could not find "joint.N.motor-pos-cmd", found only 2 with pos-cmd (the end), the one used was the only one to trigger using "normal" setting, hope this is ok.
The file names tell the settings, take note P=2450 (all others P=3450) on last pic.
Many thanks!!
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
08 May 2017 12:29 #92813
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
I thought we determined FF1 should be around 25.
At this point I thing setting I to 0 until you get a better handle on whats going on would be a good idea (I is usually the last thing to tune).
What happens if you increase D (try 30, 40, 50, 60) and show us the results?
At this point I thing setting I to 0 until you get a better handle on whats going on would be a good idea (I is usually the last thing to tune).
What happens if you increase D (try 30, 40, 50, 60) and show us the results?
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
08 May 2017 12:47 - 08 May 2017 12:48 #92814
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
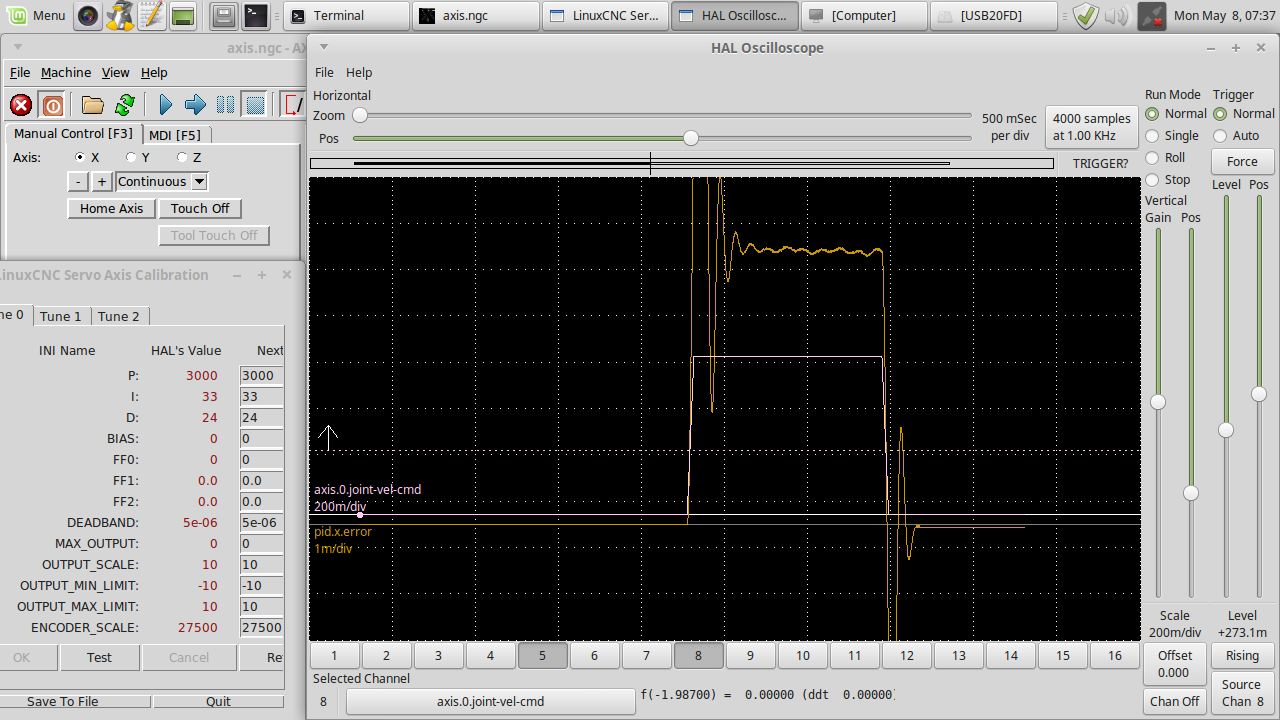
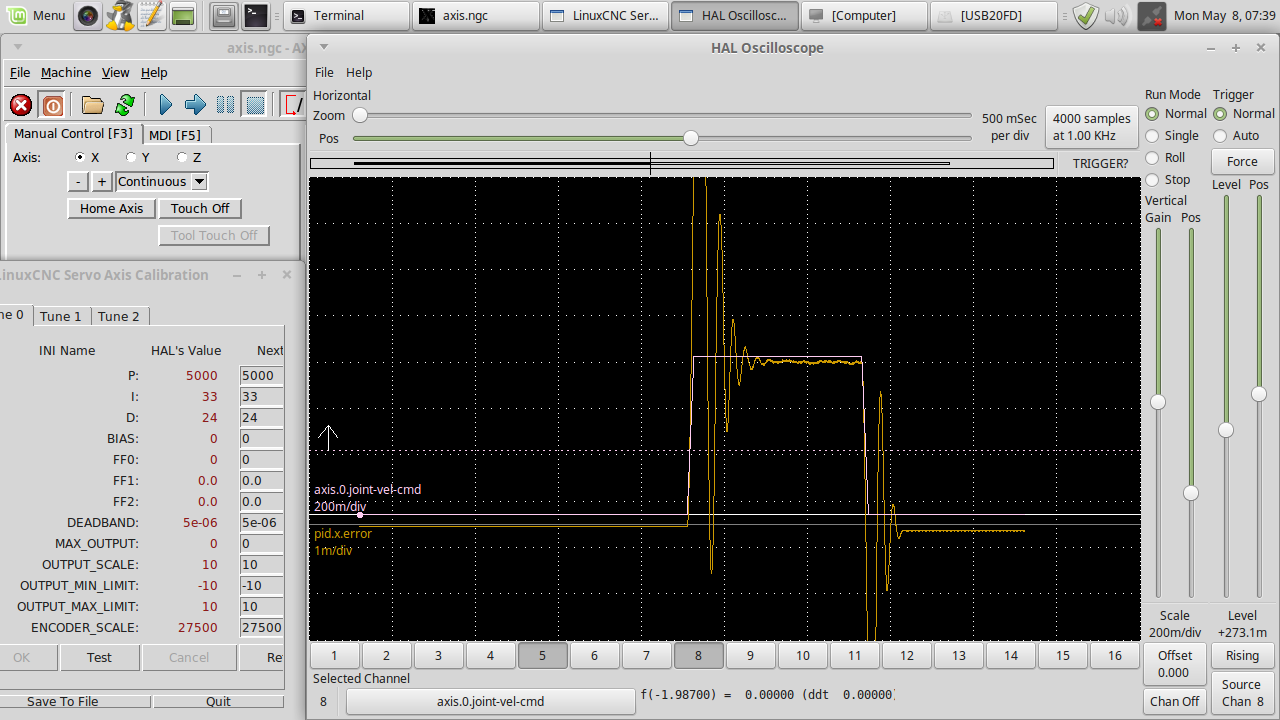
Todd and tommylight, Many, many thanks!!
Attached are several screenshots, as the P goes up the f error goes down, up to a point where it slows.
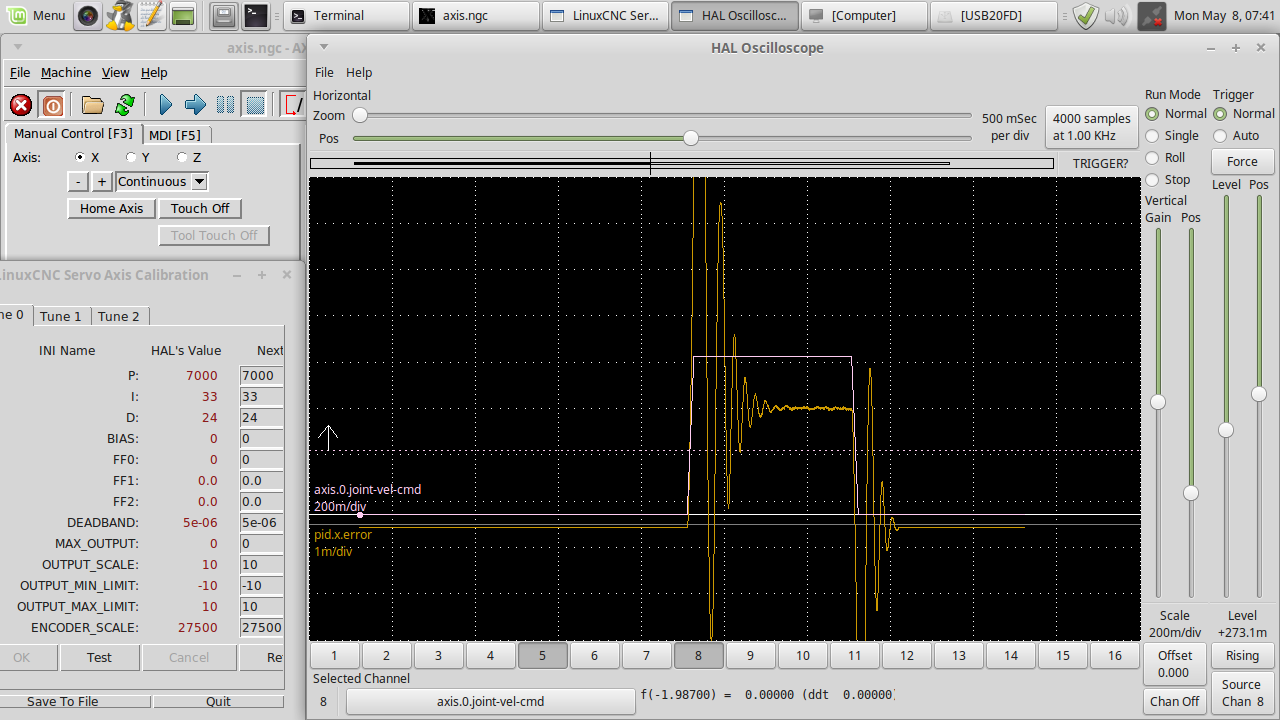
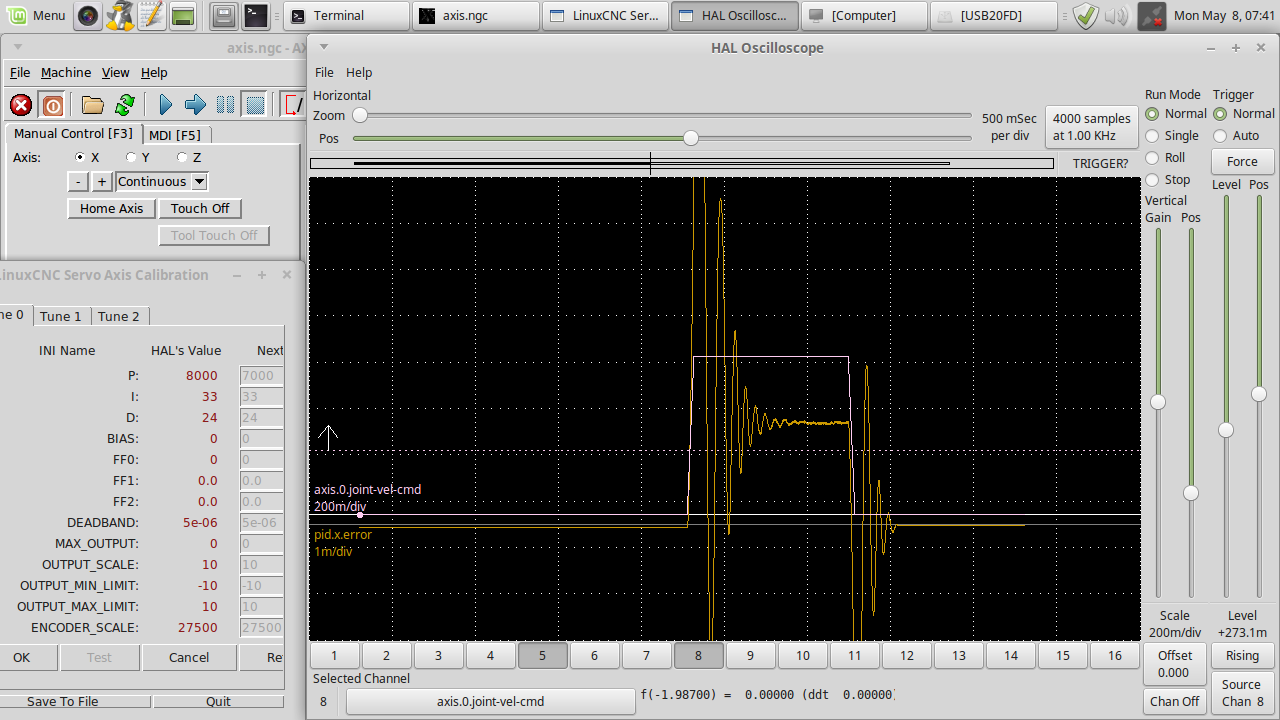
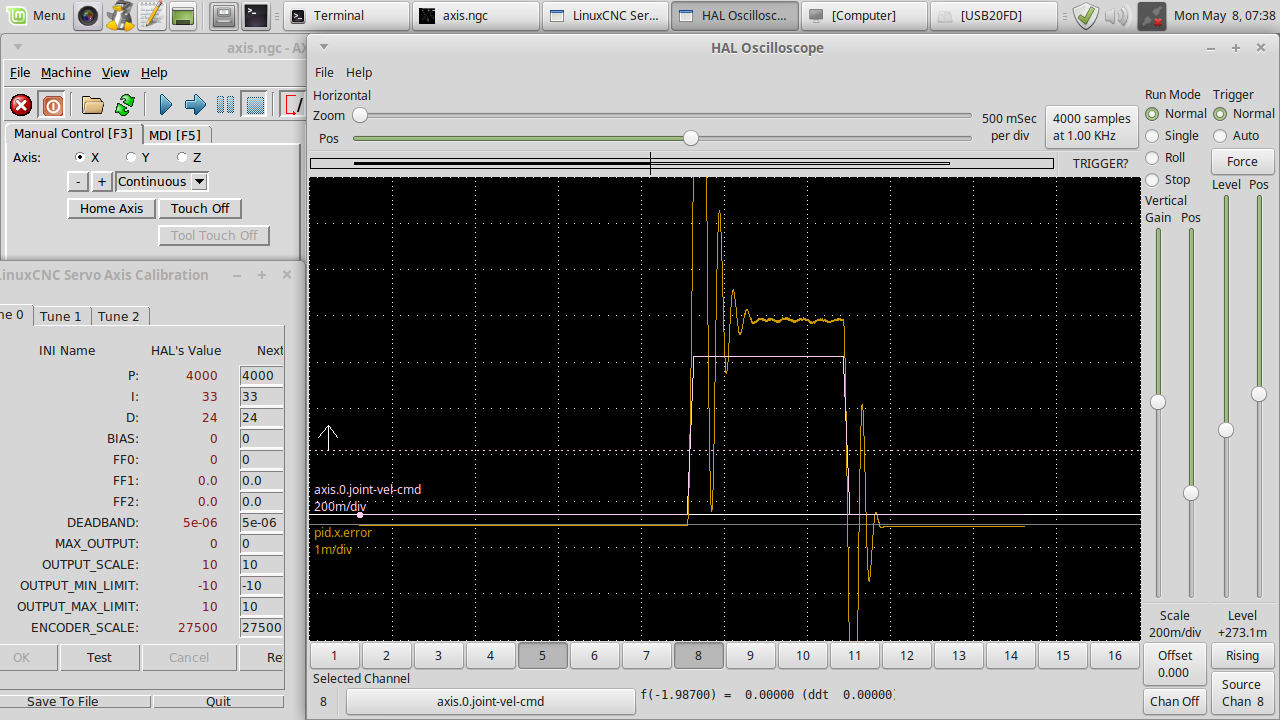
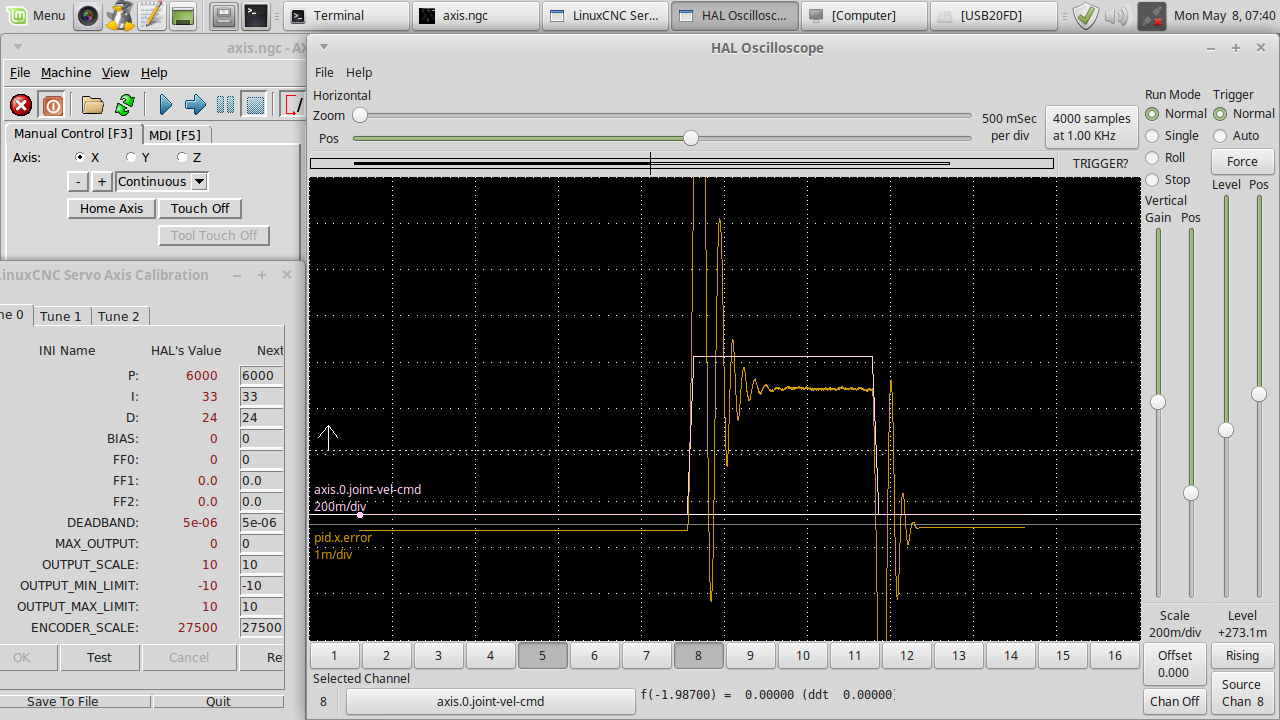
many thanks!
Attached are several screenshots, as the P goes up the f error goes down, up to a point where it slows.
many thanks!
Last edit: 08 May 2017 12:48 by new2linux. Reason: spelling
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Time to create page: 0.704 seconds