- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
- Todd Zuercher
-

- Offline
- Platinum Member
-

Less
More
- Posts: 4745
- Thank you received: 1454
08 May 2017 14:42 #92821
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
That would be expected behavior. Increasing P will decrease following errror, but will also increasingly become more and more unstable, until at some point it goes completely out of control.
You need to increase D until you only have one small bump of over shoot, instead of the half a dozen (or more) wild oscillations you have now. If you find a point where increasing the D causes the system to become unstable, set D to about 2/3s the value for D that made it unstable and you will have to reduce your P until those oscillations are under control. (The I should be set to 0 while doing all this.)
Then use FF1 to get the cruising following error as close to 0 as you can.
Then use FF2 to try to smooth out the error during acceleration as best you can.
You need to increase D until you only have one small bump of over shoot, instead of the half a dozen (or more) wild oscillations you have now. If you find a point where increasing the D causes the system to become unstable, set D to about 2/3s the value for D that made it unstable and you will have to reduce your P until those oscillations are under control. (The I should be set to 0 while doing all this.)
Then use FF1 to get the cruising following error as close to 0 as you can.
Then use FF2 to try to smooth out the error during acceleration as best you can.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
08 May 2017 15:38 #92828
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Todd, thank you!!
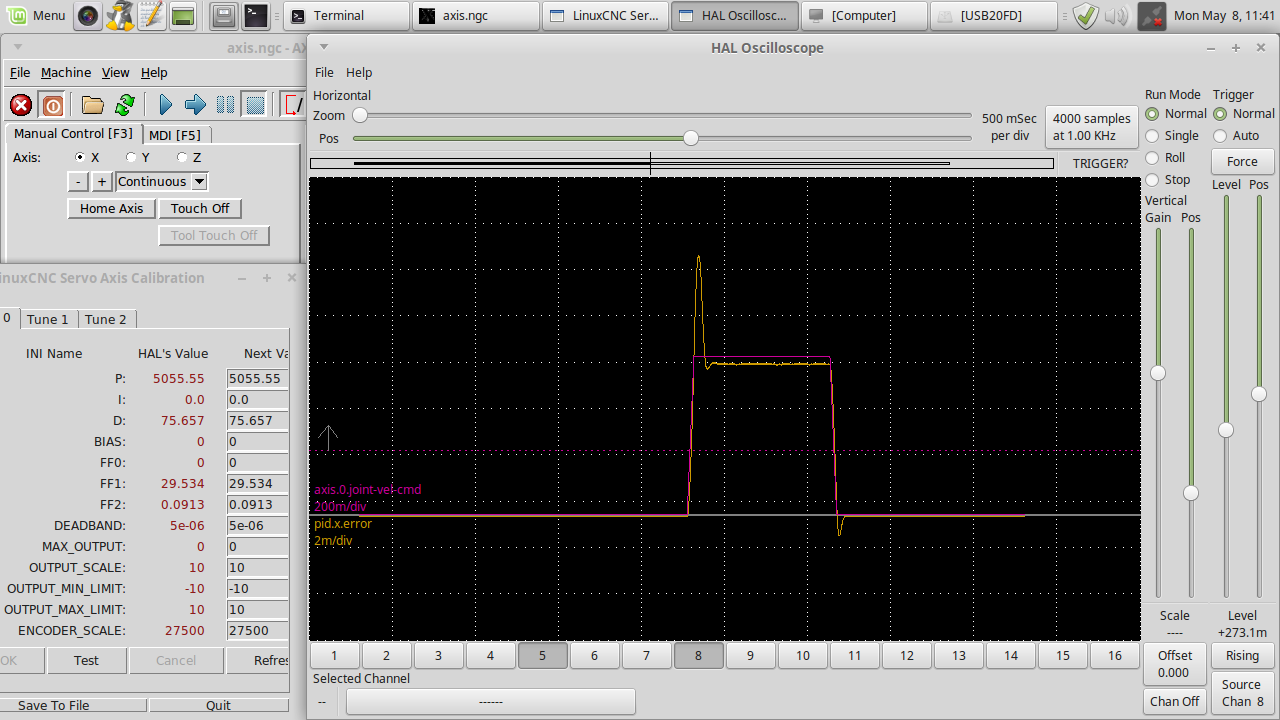
Attached are a few screenshots, I have tried several settings, this is the best so far!
Many thanks!!
Attached are a few screenshots, I have tried several settings, this is the best so far!
Many thanks!!
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
08 May 2017 15:53 #92829
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
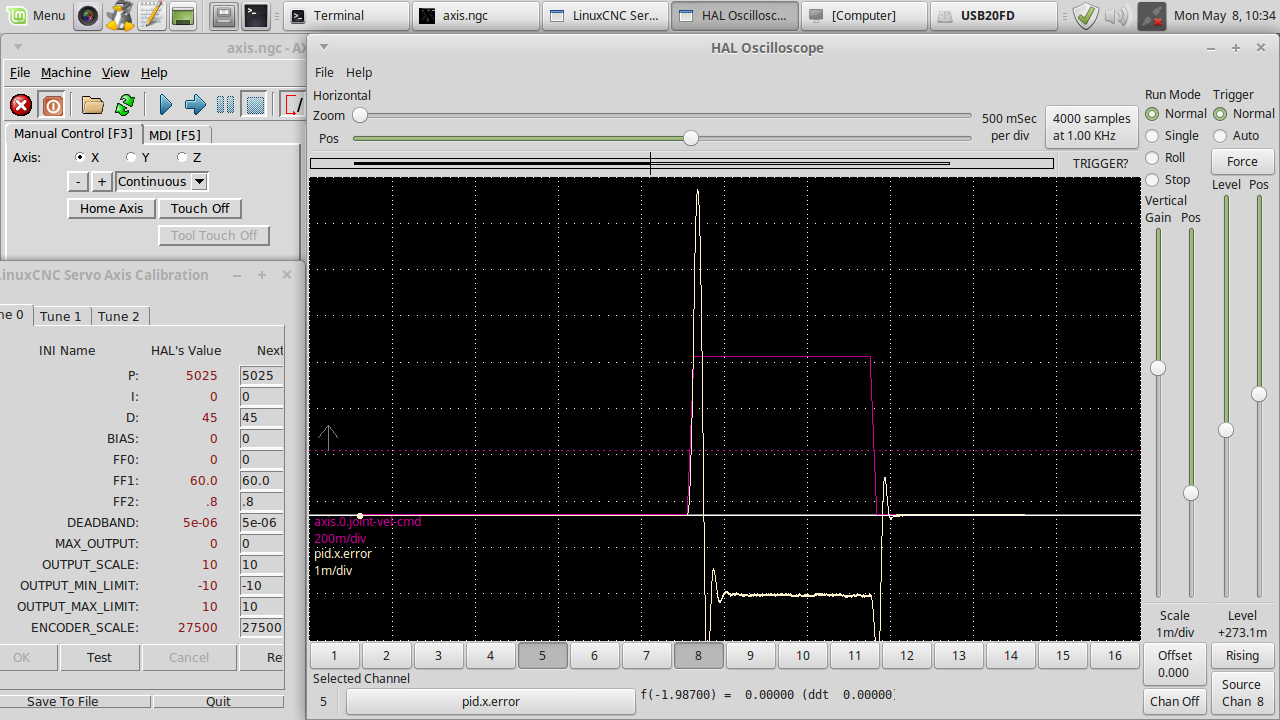
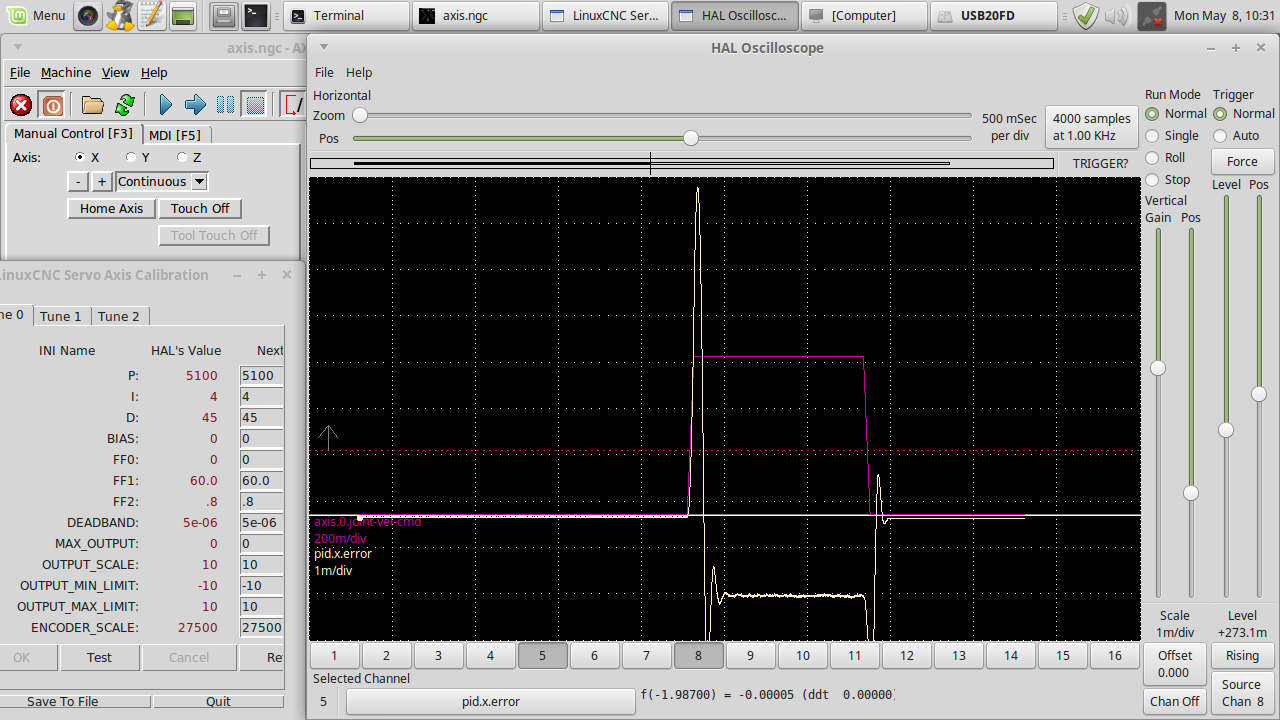
Too much FF1. (causing you to have a negative following error while cruising.)
Does more FF2 reduce the following error on acceleration further?
(I think there is still too much over shoot, so more D and/or less P. it will be hard to tune the FF2 until you get the overshoot under control.)
Does more FF2 reduce the following error on acceleration further?
(I think there is still too much over shoot, so more D and/or less P. it will be hard to tune the FF2 until you get the overshoot under control.)
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
08 May 2017 16:02 #92830
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
It is also possible your your max acceleration could still be a hair too high, causing a big following error during acceleration because the motor just can't quite catch up to the commanded position.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
08 May 2017 17:20 #92838
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Many thanks!
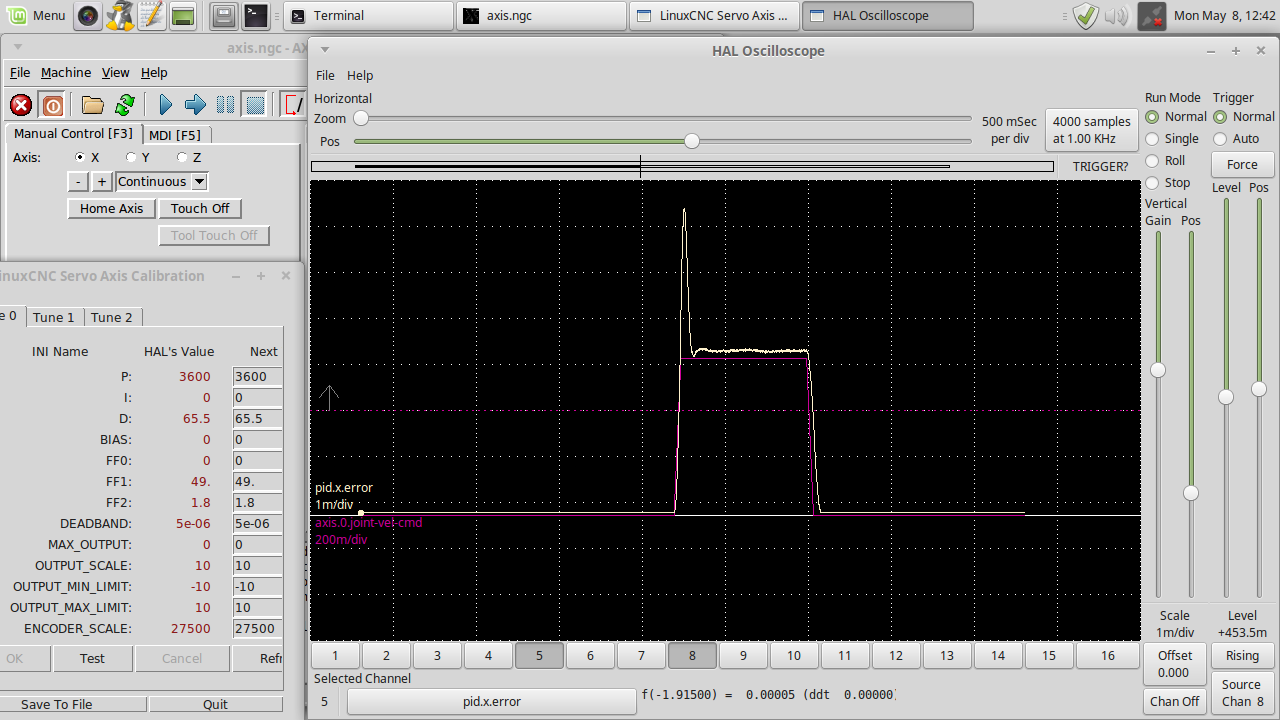
Attached are a few screenshots, p=3600 and p=5055, I tried to tune each as best it could be. Used low values, went higher and then went to best values.
many thanks!
Attached are a few screenshots, p=3600 and p=5055, I tried to tune each as best it could be. Used low values, went higher and then went to best values.
many thanks!
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
08 May 2017 17:49 - 08 May 2017 17:55 #92843
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Many thanks!
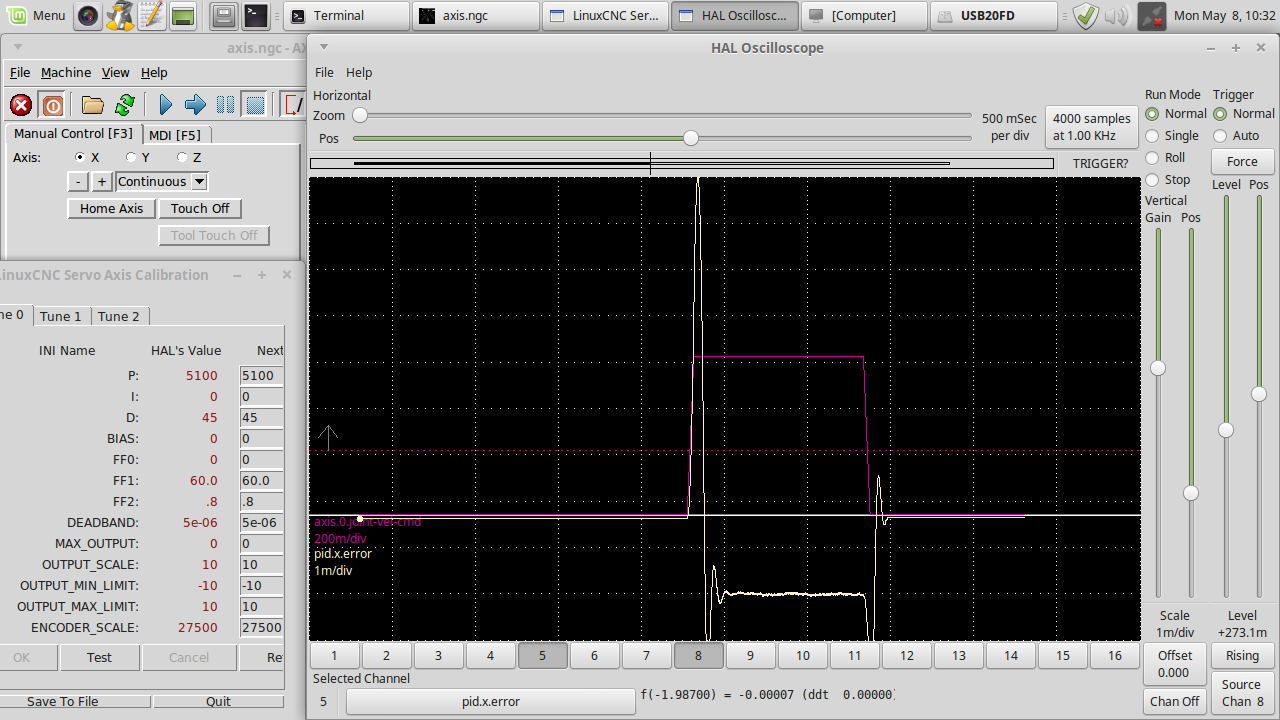
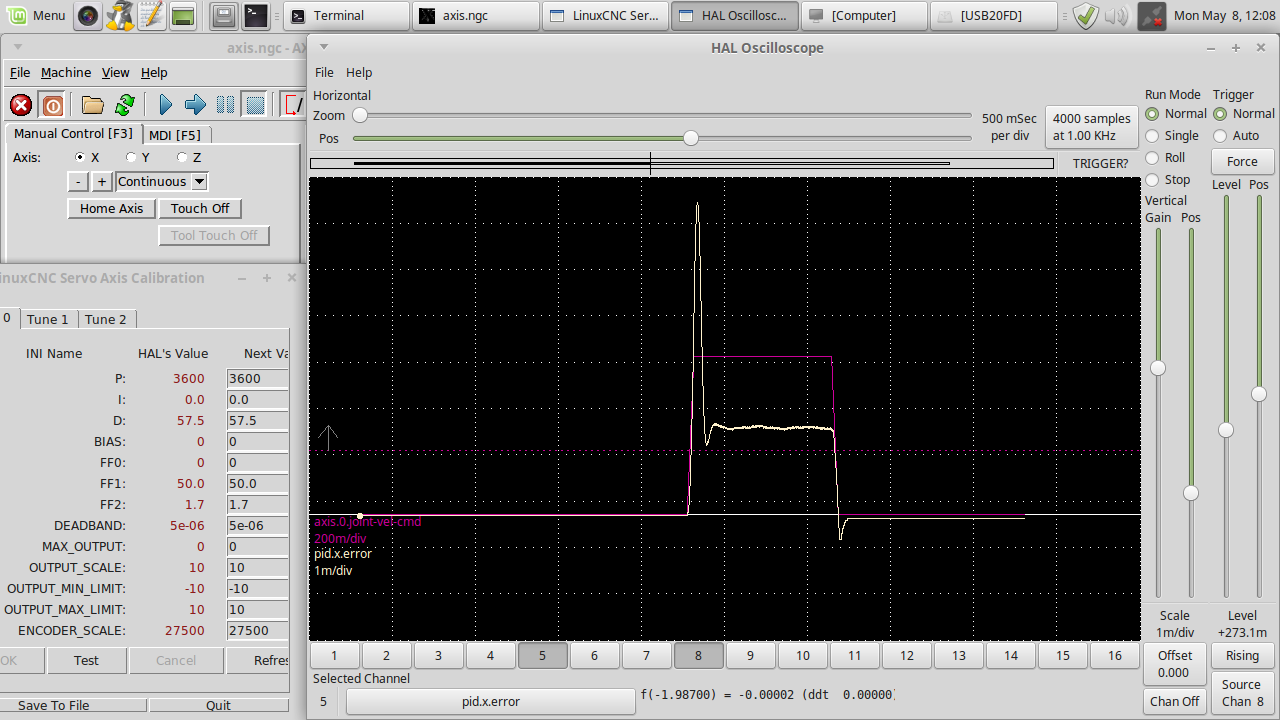
This is screenshot going max acceleration (in the .ini file) from 17.0 to 16.5.

I need to look at these to ponder some myself.
Many, many thanks!
Edit: Compare the bottom pic of this to top pic of prior post, all settings the same except ini file. I believe the prior setting (17.0) is best, less f.error.
This is screenshot going max acceleration (in the .ini file) from 17.0 to 16.5.
I need to look at these to ponder some myself.
Many, many thanks!
Edit: Compare the bottom pic of this to top pic of prior post, all settings the same except ini file. I believe the prior setting (17.0) is best, less f.error.
Last edit: 08 May 2017 17:55 by new2linux. Reason: after review
Please Log in or Create an account to join the conversation.
- andypugh
-

- Away
- Moderator
-

Less
More
- Posts: 19863
- Thank you received: 4636
08 May 2017 18:07 #92847
by andypugh
I might be tempted to try 8. See if that makes the machine seem sluggish. Unless you plan on doing a lot of 3D-profiling work you might not need to be hard against the machine physical limits. And even then you could probably limit the fierce acceleration to the (light?) Z axis.
Replied by andypugh on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
This is screenshot going max acceleration (in the .ini file) from 17.0 to 16.5.
I might be tempted to try 8. See if that makes the machine seem sluggish. Unless you plan on doing a lot of 3D-profiling work you might not need to be hard against the machine physical limits. And even then you could probably limit the fierce acceleration to the (light?) Z axis.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Offline
- Platinum Member
-
Less
More
- Posts: 4745
- Thank you received: 1454
08 May 2017 18:16 - 08 May 2017 18:35 #92852
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Can you go back to having the hm2_5i25.0.encoder.00.velocity shown on the trace as well, so we can see how well the actual velocity matches up with the commanded.
(Remember you are trying to make the following error trace be as close to a flat line on zero as you can, not make it follow the the velocity command trace.)
In the last copy of your ini file that you posted on May 5. You still have the Max_acceleration for X set to 30 (you have Y set to 17)
These last halscope traces you posted were done on the X axis and they seem to imply that the X axis acceleration is still too high.
It is showing nearly a 1 inch following error during the acceleration phase of the move.
#********************
# Axis X
#********************
[AXIS_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 0.80
MAX_ACCELERATION = 30.0
P = 6000
I = 50
D = 40
FF0 = 0
FF1 = -0.2
FF2 = 18
BIAS = 0
DEADBAND = 9e-05
MAX_OUTPUT = 0
ENCODER_SCALE = 27500
OUTPUT_SCALE = 10
OUTPUT_MIN_LIMIT = -10
OUTPUT_MAX_LIMIT = 10
MIN_LIMIT = -11.0
MAX_LIMIT = 11.0
HOME_OFFSET = 0.0
#********************
# Axis Y
#********************
[AXIS_1]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 0.72
MAX_ACCELERATION = 17.0
P = 1000
I = 50
D = 23
FF0 = 0
FF1 = 6e-05
FF2 = 0.0001
BIAS = 0
DEADBAND = 1e-05
MAX_OUTPUT = 0
ENCODER_SCALE = 27500
OUTPUT_SCALE = 10
OUTPUT_MIN_LIMIT = -10
OUTPUT_MAX_LIMIT = 10
MIN_LIMIT = -5.5
MAX_LIMIT = 5.5
HOME_OFFSET = 0.0
(Remember you are trying to make the following error trace be as close to a flat line on zero as you can, not make it follow the the velocity command trace.)
In the last copy of your ini file that you posted on May 5. You still have the Max_acceleration for X set to 30 (you have Y set to 17)
These last halscope traces you posted were done on the X axis and they seem to imply that the X axis acceleration is still too high.
#********************
# Axis X
#********************
[AXIS_0]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 0.80
MAX_ACCELERATION = 30.0
P = 6000
I = 50
D = 40
FF0 = 0
FF1 = -0.2
FF2 = 18
BIAS = 0
DEADBAND = 9e-05
MAX_OUTPUT = 0
ENCODER_SCALE = 27500
OUTPUT_SCALE = 10
OUTPUT_MIN_LIMIT = -10
OUTPUT_MAX_LIMIT = 10
MIN_LIMIT = -11.0
MAX_LIMIT = 11.0
HOME_OFFSET = 0.0
#********************
# Axis Y
#********************
[AXIS_1]
TYPE = LINEAR
HOME = 0.0
FERROR = 0.5
MIN_FERROR = 0.05
MAX_VELOCITY = 0.72
MAX_ACCELERATION = 17.0
P = 1000
I = 50
D = 23
FF0 = 0
FF1 = 6e-05
FF2 = 0.0001
BIAS = 0
DEADBAND = 1e-05
MAX_OUTPUT = 0
ENCODER_SCALE = 27500
OUTPUT_SCALE = 10
OUTPUT_MIN_LIMIT = -10
OUTPUT_MAX_LIMIT = 10
MIN_LIMIT = -5.5
MAX_LIMIT = 5.5
HOME_OFFSET = 0.0
Last edit: 08 May 2017 18:35 by Todd Zuercher.
Please Log in or Create an account to join the conversation.
- andypugh
-
- Away
- Moderator
-
Less
More
- Posts: 19863
- Thank you received: 4636
08 May 2017 18:21 - 08 May 2017 18:22 #92854
by andypugh
Isn't that 6 milli-inches? Or am I misunderstanding?
(I had been interpreting it as microns, and thinking it looked quite good)
Replied by andypugh on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
It is showing nearly a 1 inch following error during the acceleration phase of the move.
Isn't that 6 milli-inches? Or am I misunderstanding?
(I had been interpreting it as microns, and thinking it looked quite good)
Last edit: 08 May 2017 18:22 by andypugh.
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
08 May 2017 18:21 #92855
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Todd, thanks for your kind advise! Yes the ini file was edited and saved.
andypugh, thanks for your thoughts, this is just 2 axes machine, currently. The rapid travel seems just a little slow, but I can live with it.
many thanks!!
andypugh, thanks for your thoughts, this is just 2 axes machine, currently. The rapid travel seems just a little slow, but I can live with it.
many thanks!!
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Time to create page: 0.301 seconds