- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
- new2linux
- Offline
- Platinum Member
-

Less
More
- Posts: 711
- Thank you received: 9
28 Apr 2017 16:34 #92283
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Thank you, Andy!!
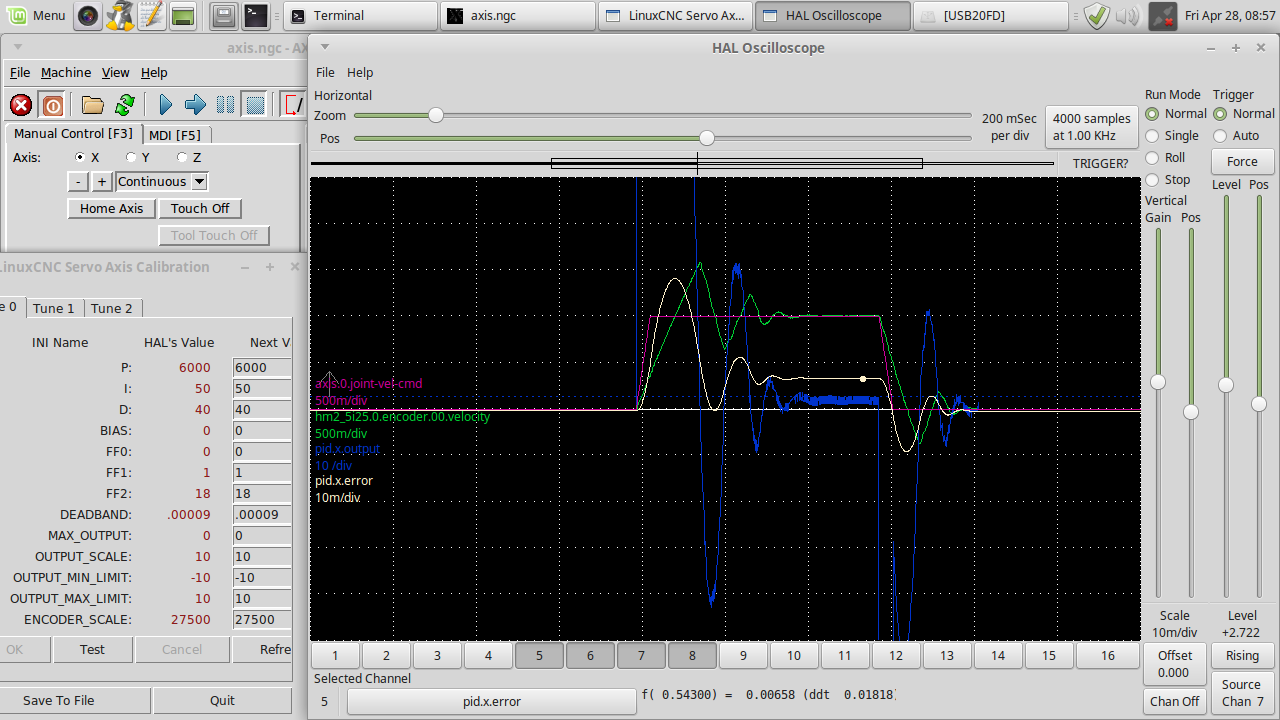
I have turned each of the variables (paid special attention to the P,I,D,Deadband,FF2,FF1), in that order, more so the 1st of the 3 (P,I,D) until there was noise (admittedly low noise that would settle down, quickly, some appeared to come and go, when I would revisit a prior setting that was known) but what you see is what I could tune "pid.n.error" to around "x axes" f(.095)=.0272 (ddt -.054) and "y axes"f(.085)=.0258 (ddt -.0182), see below:

I know this is not what is required, I will try some more tuning. If the plus side of the duel loop is to limit the velocity, I can see how wonderful that would be. If there is any thinking about the tuning of AMC amps I could review that if necessary, like say more amps would help. Your comments and suggestions are warmly welcomed.
Many, many thanks!!
I have turned each of the variables (paid special attention to the P,I,D,Deadband,FF2,FF1), in that order, more so the 1st of the 3 (P,I,D) until there was noise (admittedly low noise that would settle down, quickly, some appeared to come and go, when I would revisit a prior setting that was known) but what you see is what I could tune "pid.n.error" to around "x axes" f(.095)=.0272 (ddt -.054) and "y axes"f(.085)=.0258 (ddt -.0182), see below:
I know this is not what is required, I will try some more tuning. If the plus side of the duel loop is to limit the velocity, I can see how wonderful that would be. If there is any thinking about the tuning of AMC amps I could review that if necessary, like say more amps would help. Your comments and suggestions are warmly welcomed.
Many, many thanks!!
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
28 Apr 2017 16:40 #92284
by andypugh
I think you mean to thank Todd....
Replied by andypugh on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Thank you, Andy!!
I think you mean to thank Todd....
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
28 Apr 2017 17:07 - 28 Apr 2017 17:14 #92289
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
That does not look to me like the plot of a torque mode servo. I think your drives may be using some voltage feedback from the motor to fake velocity control. That is a good thing though.
It does look like you need to do some tuning on the drive itself. See how, even with a very high pid.N.output the acceleration is constant and linear, but way less than the commanded acceleration. You either need to adjust the tuning of the drive (this is in the drive not in Linuxcnc) so that it can accelerate the motors at least as fast (preferably a little faster) than you are commanding them in Linuxcnc. These adjustemets will likely be with trim pots on the drive or with a software program provided by the drive manufacturer. If you can't improve the drives performance, then reduce your max acceleration for the joint in Linuxcnc to something less than the drive is capable of.
It does look like you need to do some tuning on the drive itself. See how, even with a very high pid.N.output the acceleration is constant and linear, but way less than the commanded acceleration. You either need to adjust the tuning of the drive (this is in the drive not in Linuxcnc) so that it can accelerate the motors at least as fast (preferably a little faster) than you are commanding them in Linuxcnc. These adjustemets will likely be with trim pots on the drive or with a software program provided by the drive manufacturer. If you can't improve the drives performance, then reduce your max acceleration for the joint in Linuxcnc to something less than the drive is capable of.
Last edit: 28 Apr 2017 17:14 by Todd Zuercher.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
28 Apr 2017 17:11 #92290
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Which drives did you end up getting?
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
28 Apr 2017 18:46 - 28 Apr 2017 18:56 #92300
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Andy, what can I say? I have read so many threads.
Todd, I am very thankful for you taking time to help!! Thank you!
the amps are AMC Advanced Motion Control, Brush Type, this is link to pic; forum.linuxcnc.org/media/kunena/attachments/21712/IMG_1001.JPG
www.a-m-c.com/wp-content/uploads/support...ual_Analog_Panel.pdf
this is a manual for setup.
thanks!!
Todd, I am very thankful for you taking time to help!! Thank you!
the amps are AMC Advanced Motion Control, Brush Type, this is link to pic; forum.linuxcnc.org/media/kunena/attachments/21712/IMG_1001.JPG
www.a-m-c.com/wp-content/uploads/support...ual_Analog_Panel.pdf
this is a manual for setup.
thanks!!
Last edit: 28 Apr 2017 18:56 by new2linux.
Please Log in or Create an account to join the conversation.
- lakeweb
-

- Offline
- Senior Member
-

Less
More
- Posts: 56
- Thank you received: 23
28 Apr 2017 20:25 - 28 Apr 2017 20:28 #92303
by lakeweb
Replied by lakeweb on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
As I recall he got drives that only accept tach, (+=10volt), feed backs. But his motors are fitted with quad encoders. I'm pretty sure about it, but...
ADDED: So the amps may not be set properly to torque mode????
Best, Dan.
ADDED: So the amps may not be set properly to torque mode????
Best, Dan.
Last edit: 28 Apr 2017 20:28 by lakeweb.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
28 Apr 2017 20:35 #92304
by Todd Zuercher
Unfortunately that picture doesn't show the model# of the amp (They made lots of different ones), and that manual is kind of generic, covering lots of different models.
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Andy, what can I say? I have read so many threads.
Todd, I am very thankful for you taking time to help!! Thank you!
the amps are AMC Advanced Motion Control, Brush Type, this is link to pic; forum.linuxcnc.org/media/kunena/attachments/21712/IMG_1001.JPG
www.a-m-c.com/wp-content/uploads/support...ual_Analog_Panel.pdf
this is a manual for setup.
thanks!!
Unfortunately that picture doesn't show the model# of the amp (They made lots of different ones), and that manual is kind of generic, covering lots of different models.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
28 Apr 2017 21:24 #92306
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
According to that manual you need the "specific drive data sheet" to know how to configure the switches on the drive to properly set the drive's mode and tune it. If you don't have that it can easily be looked up from on line with the drive's model number.
I suspect the drive is in "Duty Cycle (Open Loop) Mode" described on pg.14 of that manual (other drives might call this voltage mode). It is best described as somewhere in between torque and velocity mode. and should be a lot simpler to tune than true torque mode.
Tuning this drive in voltage mode should be mostly the same as tuning a Pico systems amp here is a very good tutorial.
wiki.linuxcnc.org/cgi-bin/wiki.pl?PWM_Servo_Amplifiers
If I'm guessing your amp model# right this should be the data sheet.
www.researchconcepts.com/Files/20a14.pdf
I suspect the drive is in "Duty Cycle (Open Loop) Mode" described on pg.14 of that manual (other drives might call this voltage mode). It is best described as somewhere in between torque and velocity mode. and should be a lot simpler to tune than true torque mode.
Tuning this drive in voltage mode should be mostly the same as tuning a Pico systems amp here is a very good tutorial.
wiki.linuxcnc.org/cgi-bin/wiki.pl?PWM_Servo_Amplifiers
If I'm guessing your amp model# right this should be the data sheet.
www.researchconcepts.com/Files/20a14.pdf
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
30 Apr 2017 16:37 - 30 Apr 2017 16:46 #92352
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Many, many thanks for the input, I will be working in the suggestions offered!
Just as a side note I was unable to access the forum yesterday "all day" it just would request "reload" to go no where. I have reviewed the manuals for setup and tuning.
To keep all the information in one place this is a pdf from earlier thread. servosystems.com/pdf/amc/12a8.pdf This is not in order if you follow the sheet numbers. The amp is a 12A8E Advanced Motion Control, brush type.
many thanks!
Edit: Setup for "current mode" DIP switch are 1,2 & 4 = off; 3=on;
Just as a side note I was unable to access the forum yesterday "all day" it just would request "reload" to go no where. I have reviewed the manuals for setup and tuning.
To keep all the information in one place this is a pdf from earlier thread. servosystems.com/pdf/amc/12a8.pdf This is not in order if you follow the sheet numbers. The amp is a 12A8E Advanced Motion Control, brush type.
many thanks!
Edit: Setup for "current mode" DIP switch are 1,2 & 4 = off; 3=on;
Last edit: 30 Apr 2017 16:46 by new2linux. Reason: clearify current mode
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
30 Apr 2017 21:43 #92378
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
I would suggest setting the drive for voltage mode. It should behave mostly the same as velocity mode.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Time to create page: 0.243 seconds