- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
- new2linux
- Offline
- Platinum Member
-

Less
More
- Posts: 711
- Thank you received: 9
01 May 2017 12:01 #92434
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Todd, many thanks for your continued support!
As per (page 5 of 9 Hardware Settings) I plan to try DIP setting to 1=on & 2,3,4=off ie. voltage mode. I will start fresh, when tuning PID , heavy axes 1st.
many thanks!
As per (page 5 of 9 Hardware Settings) I plan to try DIP setting to 1=on & 2,3,4=off ie. voltage mode. I will start fresh, when tuning PID , heavy axes 1st.
many thanks!
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
02 May 2017 18:16 #92529
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Many thanks for all the help!
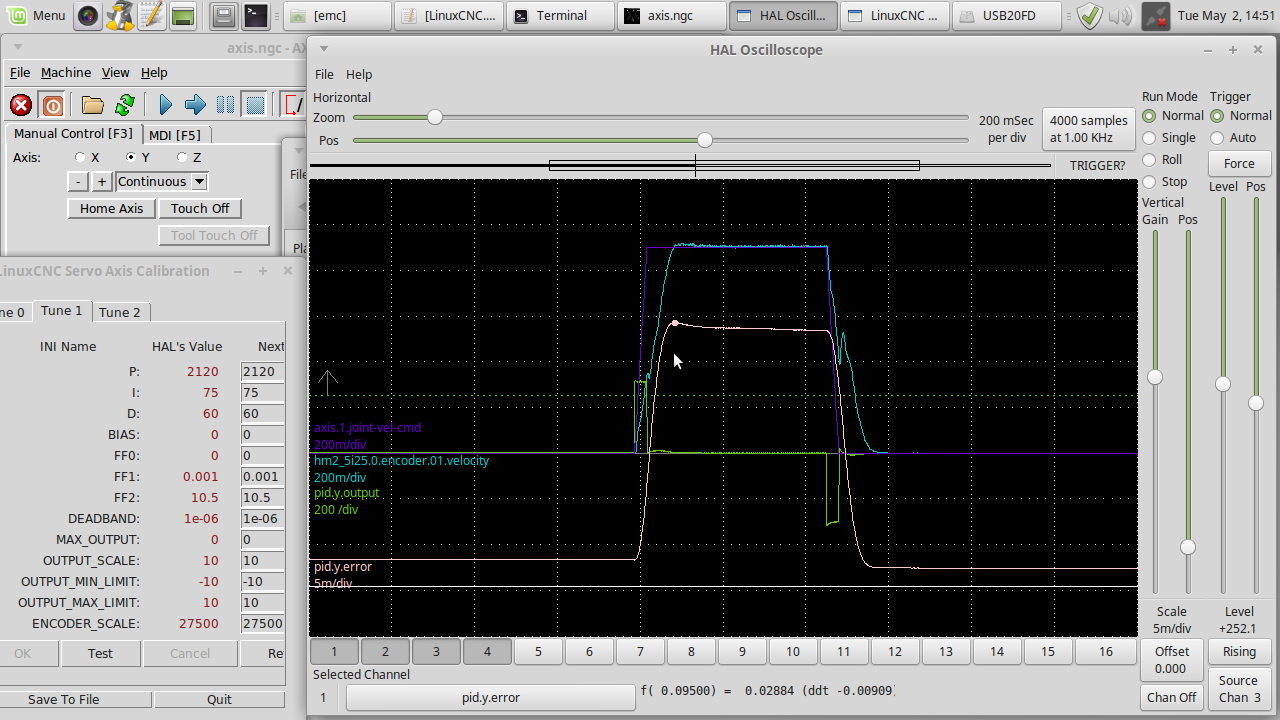
I have reached out to AMC, a knowledgeable engineer suggested the following based on the screenshot.
forum.linuxcnc.org/media/kunena/attachme...12/01yScreenshot.png
Blue line is encoder speed. "The linear line indicate constant speed and it is lagging behind your command. Based on this graph, the motor is giving you everything it has." ""You either need to slow down the acceleration and/or you need to increase the bus voltage.""
The bus voltage appears to be steady at 75vdc. Measured between (P2) lead 4 and 5. To "slow down acceleration" edit the .ini file? I just need to be clear in an approach.
many thanks!!
I have reached out to AMC, a knowledgeable engineer suggested the following based on the screenshot.
forum.linuxcnc.org/media/kunena/attachme...12/01yScreenshot.png
Blue line is encoder speed. "The linear line indicate constant speed and it is lagging behind your command. Based on this graph, the motor is giving you everything it has." ""You either need to slow down the acceleration and/or you need to increase the bus voltage.""
The bus voltage appears to be steady at 75vdc. Measured between (P2) lead 4 and 5. To "slow down acceleration" edit the .ini file? I just need to be clear in an approach.
many thanks!!
Please Log in or Create an account to join the conversation.
- andypugh
-

- Offline
- Moderator
-

Less
More
- Posts: 19875
- Thank you received: 4642
02 May 2017 18:41 #92530
by andypugh
Replied by andypugh on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Yes, max-accelleration and max-velocity are per-joint parameters in the INI file.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
02 May 2017 18:47 #92532
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Yes simply change the MAX_ACCELERATION = N, under each [AXIS_N] heading in your ini file to a smaller number. From the looks of your Halscope plot I would guess it should be about 2/3-1/2 as large as it is now. I thought I had suggested this earlier but first I thought you should confirm that there wasn't a setting in the drive that was limiting your acceleration before resorting to dialing back the acceleration.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
02 May 2017 20:06 #92542
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Todd, thanks for your help!!
Only if the bus voltage could be increased, I believe, and 75 is max.
many thanks!
Only if the bus voltage could be increased, I believe, and 75 is max.
many thanks!
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
02 May 2017 20:11 #92543
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Many, many thanks!
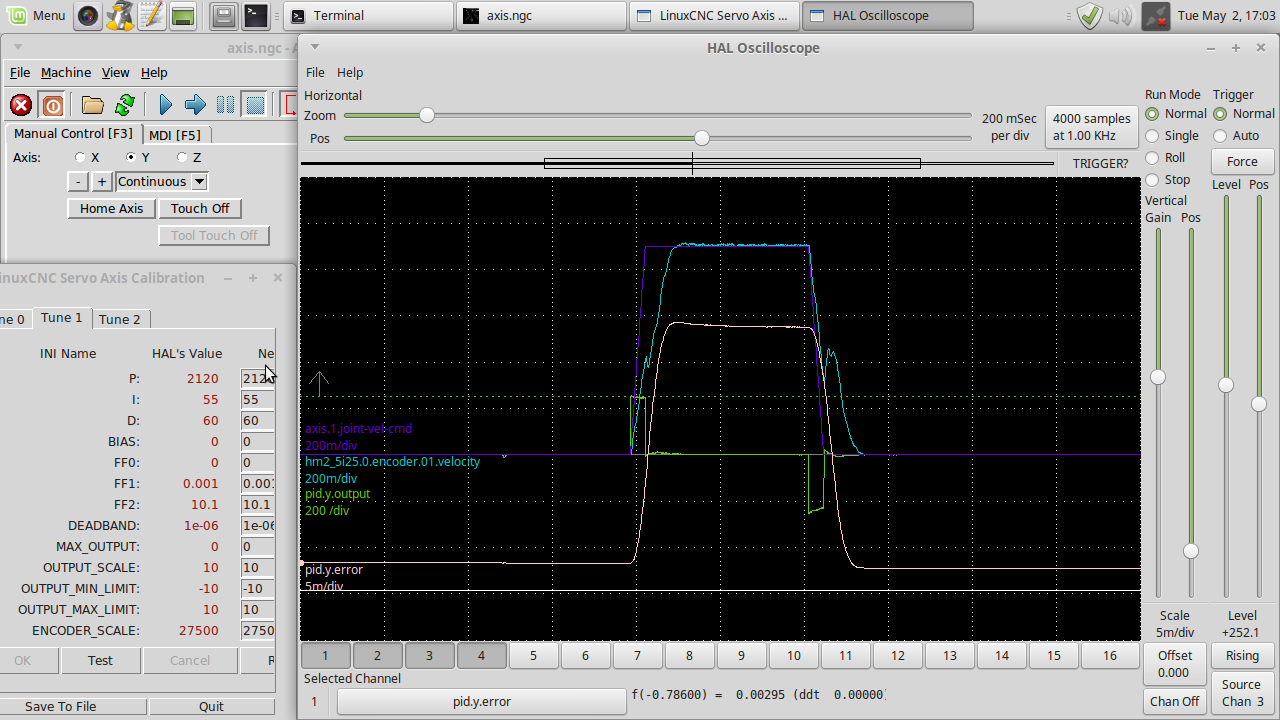
This is most recent hal trace of "y" axes.
 This was at 60"/min and max acceleration is at .9 (from 1.0). I will try .8 to see how much changes.
This was at 60"/min and max acceleration is at .9 (from 1.0). I will try .8 to see how much changes.
many thanks!
This is most recent hal trace of "y" axes.
many thanks!
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
02 May 2017 20:32 - 02 May 2017 20:33 #92544
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
When you make changes to the ini file with a text editor. You have to exit Linuxcnc and restart it for those changes to take effect. (It doesn't look like your acceleration is changing.)
You can make temporary changes to an axis' max_acceleration while Linuxcnc is running by using halcmd (either from the command prompt or the Hal Config window) to setp the pin ini.N.max_acceleration to a new value (N=the axis number)
You can make temporary changes to an axis' max_acceleration while Linuxcnc is running by using halcmd (either from the command prompt or the Hal Config window) to setp the pin ini.N.max_acceleration to a new value (N=the axis number)
Last edit: 02 May 2017 20:33 by Todd Zuercher.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
02 May 2017 22:24 #92549
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
This is the last screenshots with .7 velocity and 25.0 acceleration:

with .8 velocity and 25.0 acceleration:

with .9 velocity and 25.0 acceleration:
I plan to try tomorrow, and fresh, use restart each time.
Many, many thanks!!
with .8 velocity and 25.0 acceleration:
with .9 velocity and 25.0 acceleration:
I plan to try tomorrow, and fresh, use restart each time.
Many, many thanks!!
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
03 May 2017 03:16 #92559
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
The reason I believe you are not actually changing the acceleration, is because the slope of the velocity command (purple line) is not changing. The slope of that line is your acceleration setting, and from those halscope shots it looks like your acceleration is set to approximately 30 ips^2.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-
- Away
- Platinum Member
-
Less
More
- Posts: 4759
- Thank you received: 1461
03 May 2017 16:14 #92585
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Next time your working on this, open a HalMeter window, and If you are working on the Y axis check the value of the pin "ini.1.max_acceleration" (or for X use ini.0.max_acceleration).
Then using the "Test HAL Command" box in ShowHalConfiguration you can use the command "setp ini.1.max_acceleration 15" (or what ever number you choose) to test a new acceleration value for that axis.
Once you are happy with the results you can edit the ini file to make the change permanent.
Then using the "Test HAL Command" box in ShowHalConfiguration you can use the command "setp ini.1.max_acceleration 15" (or what ever number you choose) to test a new acceleration value for that axis.
Once you are happy with the results you can edit the ini file to make the change permanent.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Time to create page: 0.596 seconds