- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
- new2linux
- Offline
- Platinum Member
-

Less
More
- Posts: 711
- Thank you received: 9
20 Feb 2017 19:42 - 20 Feb 2017 19:46 #88377
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Many thanks PCW for all your help!
Current:
setp hm2_5i25.0.7i77.0.1.analogout2-scalemax [AXIS_2]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout2-minlim [AXIS_2]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout2-maxlim [AXIS_2]OUTPUT_MAX_LIMIT
GO TO THIS
setp hm2_5i25.0.7i77.0.2.analogout2-scalemax [AXIS_2]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.2.analogout2-minlim [AXIS_2]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.2.analogout2-maxlim [AXIS_2]OUTPUT_MAX_LIMIT
AND THIS
setp hm2_5i25.0.7i77.0.3.analogout3-scalemax [AXIS_3]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.3.analogout3minlim [AXIS_3]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.3.analogout3-maxlim [AXIS_3]OUTPUT_MAX_LIMIT
PCW am I on the correct track?
Edit: I am making big guess that "setp hm2_5i25.0.7i77.0" is the mapped encoder address? so edit in each of the areas of interest.
Current:
setp hm2_5i25.0.7i77.0.1.analogout2-scalemax [AXIS_2]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.1.analogout2-minlim [AXIS_2]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.1.analogout2-maxlim [AXIS_2]OUTPUT_MAX_LIMIT
GO TO THIS
setp hm2_5i25.0.7i77.0.2.analogout2-scalemax [AXIS_2]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.2.analogout2-minlim [AXIS_2]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.2.analogout2-maxlim [AXIS_2]OUTPUT_MAX_LIMIT
AND THIS
setp hm2_5i25.0.7i77.0.3.analogout3-scalemax [AXIS_3]OUTPUT_SCALE
setp hm2_5i25.0.7i77.0.3.analogout3minlim [AXIS_3]OUTPUT_MIN_LIMIT
setp hm2_5i25.0.7i77.0.3.analogout3-maxlim [AXIS_3]OUTPUT_MAX_LIMIT
PCW am I on the correct track?
Edit: I am making big guess that "setp hm2_5i25.0.7i77.0" is the mapped encoder address? so edit in each of the areas of interest.
Last edit: 20 Feb 2017 19:46 by new2linux. Reason: after thought
Please Log in or Create an account to join the conversation.
- andypugh
-

- Away
- Moderator
-

Less
More
- Posts: 19871
- Thank you received: 4640
20 Feb 2017 19:56 #88380
by andypugh
Replied by andypugh on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
[TRAJ]AXES in the INI is 3
So, the hal pins will only have axis.0.... axis.1.... and axis.2....
You can use any encoder and any analogout for any axis, but I really don't understand why you have [AXIS_2], [AXIS_3] and [AXIS_4] in the INI rather than the normal 0,1,2. Not only is this unusual, it won't work. Other parts of LinuxCNC (homing, for example) look explicitly for [AXIS_0] to find sequence numbers and speeds.
So, the hal pins will only have axis.0.... axis.1.... and axis.2....
You can use any encoder and any analogout for any axis, but I really don't understand why you have [AXIS_2], [AXIS_3] and [AXIS_4] in the INI rather than the normal 0,1,2. Not only is this unusual, it won't work. Other parts of LinuxCNC (homing, for example) look explicitly for [AXIS_0] to find sequence numbers and speeds.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
20 Feb 2017 20:16 #88383
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
andypugh, so very good of you and many thanks for all your help you are providing to me and the rest of the forum's members, Big Thanks!
From earlier post, a bit embarrassed about the whole thing.
"I know very early in the process, the one thing that I may have not considered enough is that earlier while moving all the components I shorted out the servo drive card thus allowing out some "magic smoke" and even though the power supply and servo drive work together with the original Ptrak, it appears it may have goofed up, this plug and play conf of linuxcnc. If there is something I'm missing in my approach or if possible to test another set of non standard, say go to (TB3 & TB4) ENCODER 2 & ENCODER 3 with (TB5) DRV 2 & DRV 3, just wondering."
So this is what happen, and why I need to try another approach. I believe the card may have issues.
From earlier post, a bit embarrassed about the whole thing.
"I know very early in the process, the one thing that I may have not considered enough is that earlier while moving all the components I shorted out the servo drive card thus allowing out some "magic smoke" and even though the power supply and servo drive work together with the original Ptrak, it appears it may have goofed up, this plug and play conf of linuxcnc. If there is something I'm missing in my approach or if possible to test another set of non standard, say go to (TB3 & TB4) ENCODER 2 & ENCODER 3 with (TB5) DRV 2 & DRV 3, just wondering."
So this is what happen, and why I need to try another approach. I believe the card may have issues.
Please Log in or Create an account to join the conversation.
- lakeweb
-

- Offline
- Senior Member
-

Less
More
- Posts: 56
- Thank you received: 23
20 Feb 2017 20:38 #88387
by lakeweb
Replied by lakeweb on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Personally, I would start with this:
Link to Mesa 5i25 Files
Or you can move all your 2,3,4 stuff to 0,1,2. But after seeing Andy's post, I would not try to make it work with 2,3,4.
Best, Dan.
Link to Mesa 5i25 Files
Or you can move all your 2,3,4 stuff to 0,1,2. But after seeing Andy's post, I would not try to make it work with 2,3,4.
Best, Dan.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- Todd Zuercher
-

- Offline
- Platinum Member
-
Less
More
- Posts: 4753
- Thank you received: 1458
20 Feb 2017 20:46 #88388
by Todd Zuercher
Replied by Todd Zuercher on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Even if the hardware has issues, the software still needs to be configured for Axis_0,1,2. Even if the hardware is plugged in where 2,3,&4 normally would be. (the redirection would be done elsewhere.)
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- andypugh
-
- Away
- Moderator
-
Less
More
- Posts: 19871
- Thank you received: 4640
20 Feb 2017 20:51 #88389
by andypugh
That is perfectly OK. But keep [AXIS_0] and axis.0... and so on, just map them to different encoders.
net x-feedback axis.0.motor-position-fb <= hm2_5i25.0.encoder.06.position
For example.
Replied by andypugh on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
If there is something I'm missing in my approach or if possible to test another set of non standard, say go to (TB3 & TB4) ENCODER 2 & ENCODER 3 with (TB5) DRV 2 & DRV 3, just wondering.".
That is perfectly OK. But keep [AXIS_0] and axis.0... and so on, just map them to different encoders.
net x-feedback axis.0.motor-position-fb <= hm2_5i25.0.encoder.06.position
For example.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
20 Feb 2017 20:52 - 20 Feb 2017 20:57 #88390
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Todd & andypung many thanks to you guys for your help!!
If all the lights work (on the card) is that the ok or is there a way to test cards to see if the card has issues?
many thanks for all
If all the lights work (on the card) is that the ok or is there a way to test cards to see if the card has issues?
many thanks for all
Last edit: 20 Feb 2017 20:57 by new2linux. Reason: tweek
Please Log in or Create an account to join the conversation.
- tommylight
-

- Offline
- Moderator
-
Less
More
- Posts: 21683
- Thank you received: 7406
20 Feb 2017 20:54 #88391
by tommylight
Replied by tommylight on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
setp hm2_5i25.0.7i77.0.3. <==== you can not change that, that is a mesa board sserial address. They have to be the same in your hal file.
You can change the analogout.0 and encoder.0 respectively.
You can change the analogout.0 and encoder.0 respectively.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- andypugh
-
- Away
- Moderator
-
Less
More
- Posts: 19871
- Thank you received: 4640
21 Feb 2017 09:33 #88423
by andypugh
You can read the inputs and drive the outputs manually.
Wire an MPG or even a motor + encoder to one of your encoder terminal blocks.
Power up the cards.
Start the PC, but not LinuxCNC, and open a terminal window.
Start a HAL sessionYou can now type the usual HAL commands and make changes to the live system
The commands below can use tab-completion. I suggest that you actively do this, to ensure the correct spelling of the HAL pins, which I am guessing from memory.At this point I would expect to see some LEDs on the cards, and maybe a slow-flashing "heartbeat", But without a 7i77 to test with, I can't say for sure.
Get a list of all the HAL pins and parameters Copy this from the terminal and put it in a text file for later reference
Now open a halmeter to display the encoder counts.You can now select encoder.0.counts in the halmeter selection dialog. Plug the physical encoder into the relevant TB, and rotate it, the numbers hould change.
Repeat for the other encoder plug positions.
And exercise the analogue outputss. (I really don't know what these are called for sure, but you should, by this point)
Test them with a multimeter.
You should be able to test the 7i77 GPIO the same way too. Look at the HAL pin list for the names, and use the "setp" command to set them to 0 or 1. Test with a multimeter.
Replied by andypugh on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Todd & andypung many thanks to you guys for your help!!
If all the lights work (on the card) is that the ok or is there a way to test cards to see if the card has issues?
You can read the inputs and drive the outputs manually.
Wire an MPG or even a motor + encoder to one of your encoder terminal blocks.
Power up the cards.
Start the PC, but not LinuxCNC, and open a terminal window.
Start a HAL session
halrunThe commands below can use tab-completion. I suggest that you actively do this, to ensure the correct spelling of the HAL pins, which I am guessing from memory.
loadrt hostmot2
loadrt hm2_pci
loadrt threads
addf hm2_5i25.0.read thread1
addf hm2_5i25.0.write thread1
startGet a list of all the HAL pins and parameters Copy this from the terminal and put it in a text file for later reference
show pin
show paramNow open a halmeter to display the encoder counts.
loadusr halmeterRepeat for the other encoder plug positions.
And exercise the analogue outputss. (I really don't know what these are called for sure, but you should, by this point)
Test them with a multimeter.
setp hm2_5i25.0.7i77.0.0.analogout0 10
setp hm2_5i25.0.7i77.0.0.analogout0 5
setp hm2_5i25.0.7i77.0.0.analogout0 1
.... (and so on)You should be able to test the 7i77 GPIO the same way too. Look at the HAL pin list for the names, and use the "setp" command to set them to 0 or 1. Test with a multimeter.
The following user(s) said Thank You: new2linux
Please Log in or Create an account to join the conversation.
- new2linux
- Offline
- Platinum Member
-
Less
More
- Posts: 711
- Thank you received: 9
21 Feb 2017 14:19 #88426
by new2linux
Replied by new2linux on topic Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
andypugh, many, many thanks! for the correct way to test encoders, the encoders show motion in both of the configurations of (TB3 & TB4) ENCODER 2 & ENCODER 3 with (TB5) DRV 2 & DRV 3; and the preferred 00 and 01 for "x" "y".
This screen shot is of the "show pin and parm" set of files.
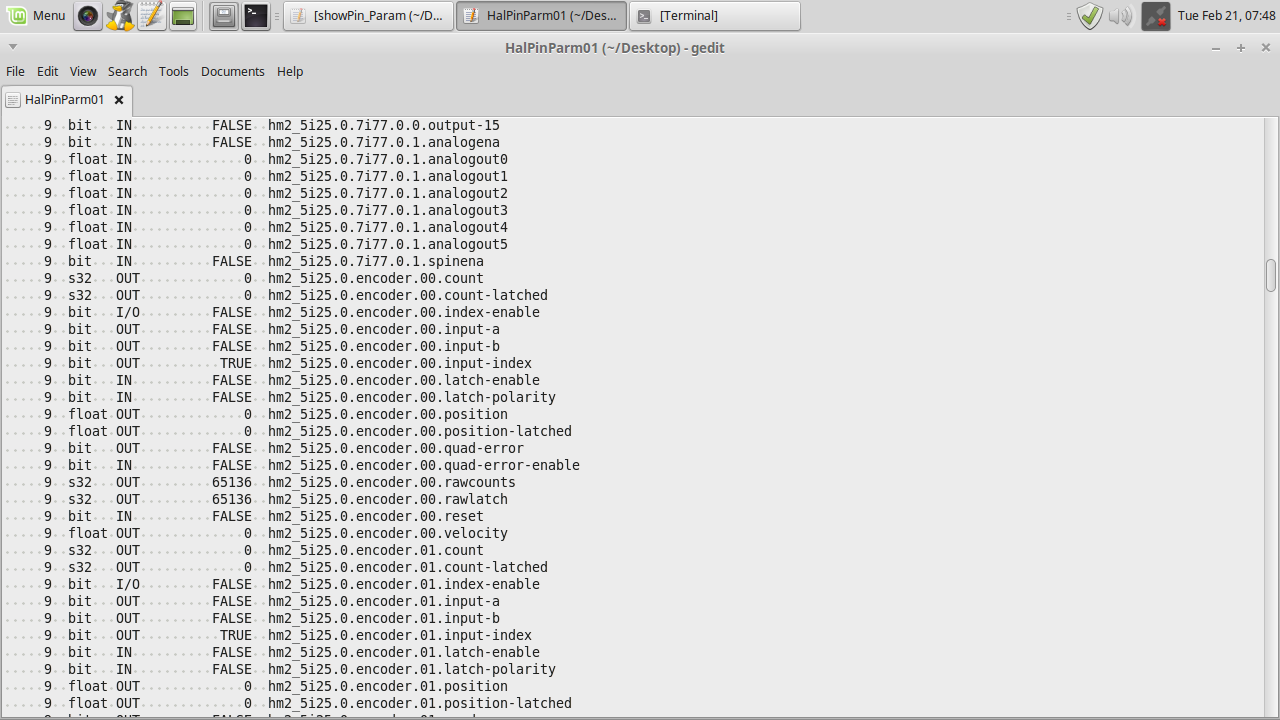
If you look at the top you can see the files in question:
hm2. analogout0 etc. to analogout5
I am not completely shore if using "halrun" to gain access to the "setp"? Do I "copy" or "key in" the files as shown, starting with the "hm2", preceded with the "setp" command? Then use the "start" command to "setp" and then measure with multimeter, where the voltage to drives. or low voltage at the TB5 connections? Just a bit shy about not having more confidence in this area, and the need to get it correct.
Many Thanks to each of you, for being so very, very helpful!
This screen shot is of the "show pin and parm" set of files.
If you look at the top you can see the files in question:
hm2. analogout0 etc. to analogout5
I am not completely shore if using "halrun" to gain access to the "setp"? Do I "copy" or "key in" the files as shown, starting with the "hm2", preceded with the "setp" command? Then use the "start" command to "setp" and then measure with multimeter, where the voltage to drives. or low voltage at the TB5 connections? Just a bit shy about not having more confidence in this area, and the need to get it correct.
Many Thanks to each of you, for being so very, very helpful!
Please Log in or Create an account to join the conversation.
Moderators: piasdom
- Hardware & Machines
- CNC Machines
- Milling Machines
- Prototrak Plus Retrofit with Mesa 7i77 & 5i25 cards
Time to create page: 0.483 seconds