HURCO KMB-1 Control Update
- tommylight
-

- Offline
- Moderator
-

Less
More
- Posts: 21646
- Thank you received: 7394
08 Feb 2025 16:37 #321003
by tommylight
Replied by tommylight on topic HURCO KMB-1 Control Update
If that pin is used for homing, you can not create it, well you can, but that would require a lot of change in homing configuration.
Machine pins you can find by using the "show hal configuration" from the "machine" menu when you run LinuxCNC.
But since you can not run LinuxCNC yet, you can find them in the hal and ini files you are using, the pins are usually like this:
net both-home-x <= hm2_7i96.0.gpio.000.in_not
net both-home-x => joint.0.home-sw-in
net both-home-x => joint.0.neg-lim-sw-in
net both-home-x => joint.0.pos-lim-sw-in
Machine pins you can find by using the "show hal configuration" from the "machine" menu when you run LinuxCNC.
But since you can not run LinuxCNC yet, you can find them in the hal and ini files you are using, the pins are usually like this:
net both-home-x <= hm2_7i96.0.gpio.000.in_not
net both-home-x => joint.0.home-sw-in
net both-home-x => joint.0.neg-lim-sw-in
net both-home-x => joint.0.pos-lim-sw-in
Please Log in or Create an account to join the conversation.
- NT4Boy
- Offline
- Premium Member
-

Less
More
- Posts: 147
- Thank you received: 13
08 Feb 2025 16:48 #321004
by NT4Boy
Replied by NT4Boy on topic HURCO KMB-1 Control Update
Not only makes even more sense, but works.
Thank you sir, again.
Thank you sir, again.
Please Log in or Create an account to join the conversation.
- NT4Boy
- Offline
- Premium Member
-
Less
More
- Posts: 147
- Thank you received: 13
08 Feb 2025 16:55 - 08 Feb 2025 16:57 #321005
by NT4Boy
Replied by NT4Boy on topic HURCO KMB-1 Control Update
Linuxcnc is running, well little by little.
I have the encoders counting and the DRO scale is calibrated.
I have the limit switches all tripping.
I have the main safety relay latching and tripping from the external button.
Next stop to get the safety relay to trip from the gui, then I plan to enable the servo relay, see if the axes can be moved by the gui, then study homing which looks like a whole mountain of mystery in itself.
I have the encoders counting and the DRO scale is calibrated.
I have the limit switches all tripping.
I have the main safety relay latching and tripping from the external button.
Next stop to get the safety relay to trip from the gui, then I plan to enable the servo relay, see if the axes can be moved by the gui, then study homing which looks like a whole mountain of mystery in itself.
Last edit: 08 Feb 2025 16:57 by NT4Boy.
Please Log in or Create an account to join the conversation.
- NT4Boy
- Offline
- Premium Member
-
Less
More
- Posts: 147
- Thank you received: 13
09 Feb 2025 19:44 #321105
by NT4Boy
Replied by NT4Boy on topic HURCO KMB-1 Control Update
Getting the ENA signal out to the original Hurco servo relay was problem as they draw 55mA. Solved by using a ULN2003 channel. Note that this needs to be done via a series 3k3 resistor and 1K resistor to ground.
Re the Estop.
I can trip the Estop relay, from the GUI, or pressing the Mechanical button, however, when I use the Mechanical switch, the gui doesn't register that the relay has tripped.
Is it possible to use the fact the estop terminal (OUTPUT0) is no longer conducting as a signal to change the GUI Estop status? If that's not picking myself up by my bootlaces...
Re the Estop.
I can trip the Estop relay, from the GUI, or pressing the Mechanical button, however, when I use the Mechanical switch, the gui doesn't register that the relay has tripped.
Is it possible to use the fact the estop terminal (OUTPUT0) is no longer conducting as a signal to change the GUI Estop status? If that's not picking myself up by my bootlaces...
Please Log in or Create an account to join the conversation.
- NT4Boy
- Offline
- Premium Member
-
Less
More
- Posts: 147
- Thank you received: 13
10 Feb 2025 16:59 - 10 Feb 2025 17:00 #321173
by NT4Boy
Replied by NT4Boy on topic HURCO KMB-1 Control Update
Three axes moving. Not without a fight.
On enabling the servos, without me touching anything, the z axis would advance about 1mm, and trip out with joint follower error. Similar symptom to replacing an encoder and getting the a and b channels swapped. Took me too many hours to find in the heart of Tommy's tuning guide the answer, put a minus in front of the motor scale figure. (Required on all the axes.)
I've entered a default figure 20 for P and deadband.0001mm. Kind of surprised I cannot get it to error even at max jog speed.
Keep jacking up the P value, until it oscillates I guess, a job for another day.
On enabling the servos, without me touching anything, the z axis would advance about 1mm, and trip out with joint follower error. Similar symptom to replacing an encoder and getting the a and b channels swapped. Took me too many hours to find in the heart of Tommy's tuning guide the answer, put a minus in front of the motor scale figure. (Required on all the axes.)
I've entered a default figure 20 for P and deadband.0001mm. Kind of surprised I cannot get it to error even at max jog speed.
Keep jacking up the P value, until it oscillates I guess, a job for another day.
Last edit: 10 Feb 2025 17:00 by NT4Boy.
The following user(s) said Thank You: tommylight
Please Log in or Create an account to join the conversation.
- NT4Boy
- Offline
- Premium Member
-
Less
More
- Posts: 147
- Thank you received: 13
14 Feb 2025 10:34 #321534
by NT4Boy
Replied by NT4Boy on topic HURCO KMB-1 Control Update
I've found a spindle overload signal comes from the ancient VFD, 5v at similar level to the limit switches and encoders.
For the limit switches I am using encoder channels 3 and 4.
Analogue output 5 is for the spindle, and the spindle motor has no encoders.
Can I use one these unused encoder pins, say QA5, for this overload signal? Or is it out of bounds if the analogue side is used?
Thanks
For the limit switches I am using encoder channels 3 and 4.
Analogue output 5 is for the spindle, and the spindle motor has no encoders.
Can I use one these unused encoder pins, say QA5, for this overload signal? Or is it out of bounds if the analogue side is used?
Thanks
Please Log in or Create an account to join the conversation.
- NT4Boy
- Offline
- Premium Member
-
Less
More
- Posts: 147
- Thank you received: 13
17 Feb 2025 16:09 - 17 Feb 2025 22:05 #321843
by NT4Boy
Replied by NT4Boy on topic HURCO KMB-1 Control Update
Homing is now driving out to the limit switches.
I've set x axis (joint(0):-
HOME_SEQUENCE = 2
HOME_SEARCH_VEL = -100
HOME_LATCH_VEL = 10
HOME_USE_INDEX = YES
HOME_OFFSET = 5.08
HOME = 25.4
But not returning to the index.
Thanks
I've set x axis (joint(0):-
HOME_SEQUENCE = 2
HOME_SEARCH_VEL = -100
HOME_LATCH_VEL = 10
HOME_USE_INDEX = YES
HOME_OFFSET = 5.08
HOME = 25.4
But not returning to the index.
Thanks
Last edit: 17 Feb 2025 22:05 by NT4Boy. Reason: Typo in hal fixed.
Please Log in or Create an account to join the conversation.
- NT4Boy
- Offline
- Premium Member
-
Less
More
- Posts: 147
- Thank you received: 13
17 Feb 2025 20:10 #321864
by NT4Boy
Replied by NT4Boy on topic HURCO KMB-1 Control Update
It helps if I spell HOME_SEARCH_VEL correctly.
So, pressing home, the axis travels to the minus limit, where is stops with an error.
I think the relevant hal lines are.:-
net x-home-sw <= hm2_7i92.0.encoder.03.input-a
(I have 5volt limit switches, so I have then connected to unused encoder pins)
net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
net x-home-sw => joint.0.home-sw-in
net x-home-sw => joint.0.neg-lim-sw-in
net x-home-sw => joint.0.pos-lim-sw-in
Quite confused about why its hitting the limit switch as an end of travel, but not using that as the home trip, and returning to the encoder index.
Appreciate any thoughts.
Thanks
So, pressing home, the axis travels to the minus limit, where is stops with an error.
I think the relevant hal lines are.:-
net x-home-sw <= hm2_7i92.0.encoder.03.input-a
(I have 5volt limit switches, so I have then connected to unused encoder pins)
net x-index-enable joint.0.index-enable <=> hm2_7i92.0.encoder.00.index-enable
net x-home-sw => joint.0.home-sw-in
net x-home-sw => joint.0.neg-lim-sw-in
net x-home-sw => joint.0.pos-lim-sw-in
Quite confused about why its hitting the limit switch as an end of travel, but not using that as the home trip, and returning to the encoder index.
Appreciate any thoughts.
Thanks
Please Log in or Create an account to join the conversation.
- NT4Boy
- Offline
- Premium Member
-
Less
More
- Posts: 147
- Thank you received: 13
20 Feb 2025 16:31 - 20 Feb 2025 16:41 #322084
by NT4Boy
Replied by NT4Boy on topic HURCO KMB-1 Control Update
In fact there is nothing much wrong with the hal and ini entries,
HOME_OFFSET = 25.4
HOME = 0
I understand these better now, and to have the machine Home position at 0.0 25.4mm away from the limit switch after the encoder index has registered was my intention.
But even after I have tuned the axis I cannot get a successful home.
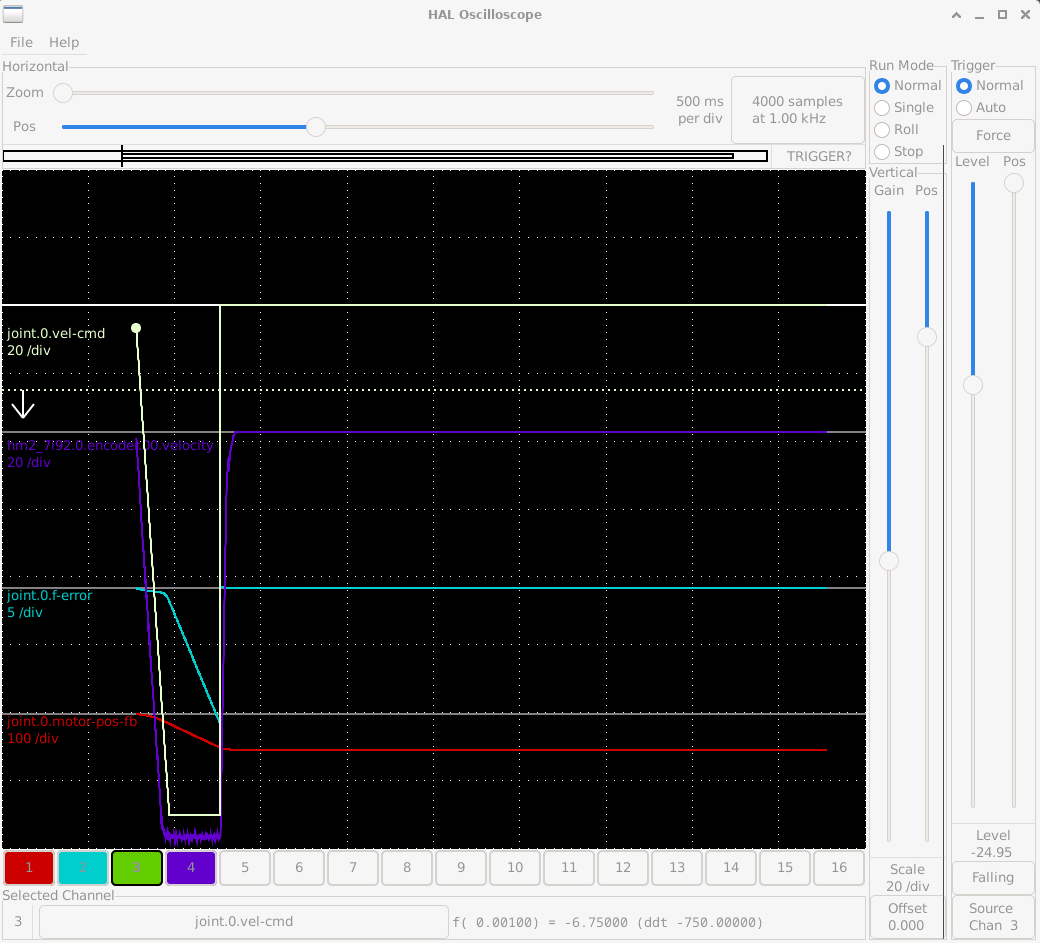
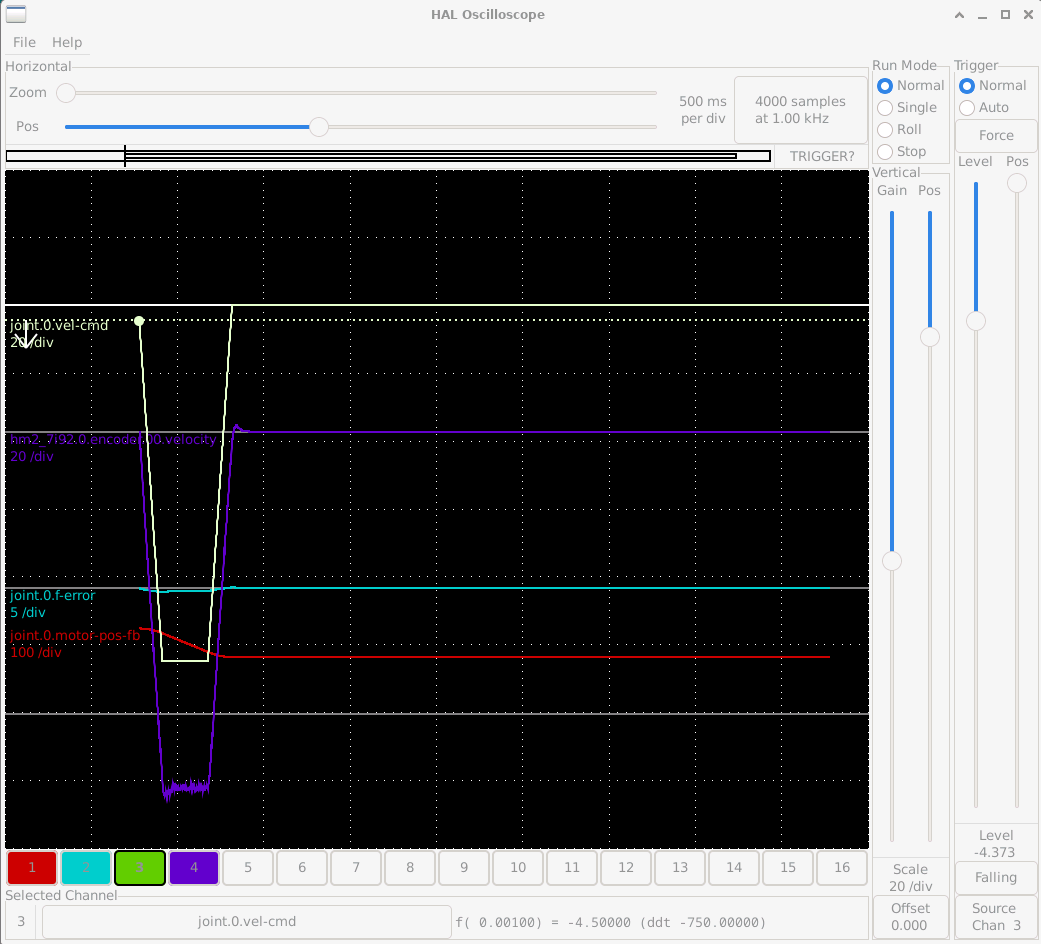
It has however stopped parking on the limit switch, but but can generate a big joint following error. The Rapid Halscope image, is at 6350mm/min and to me from what I've learned from the tutorial is pretty good.
I've set the HAlscope f-error at 5/DIV to match the tutorials, but wonder if that's correct for a metric setup
The Home image is the follower error up to the shutdown, which shows a massive figure that I cannot reproduced with the jog buttons even at max table speed.
Not quite making sense to me yet.
I'd appreciate some comments.
HOME_OFFSET = 25.4
HOME = 0
I understand these better now, and to have the machine Home position at 0.0 25.4mm away from the limit switch after the encoder index has registered was my intention.
But even after I have tuned the axis I cannot get a successful home.
It has however stopped parking on the limit switch, but but can generate a big joint following error. The Rapid Halscope image, is at 6350mm/min and to me from what I've learned from the tutorial is pretty good.
I've set the HAlscope f-error at 5/DIV to match the tutorials, but wonder if that's correct for a metric setup
The Home image is the follower error up to the shutdown, which shows a massive figure that I cannot reproduced with the jog buttons even at max table speed.
Not quite making sense to me yet.
I'd appreciate some comments.
Attachments:
Last edit: 20 Feb 2025 16:41 by NT4Boy. Reason: Typo noticed
Please Log in or Create an account to join the conversation.
- PCW
-

- Offline
- Moderator
-
Less
More
- Posts: 17925
- Thank you received: 5250
20 Feb 2025 16:46 #322086
by PCW
Replied by PCW on topic HURCO KMB-1 Control Update
In the top plot, it looks to me like you have the maximum velocity faster the the drive can go
(so the following error rapidly increases when you reach the limit)
Normally you will need to set LinuxCNCs velocity limit to 80-90% of the machine velocity at 10V
(so the following error rapidly increases when you reach the limit)
Normally you will need to set LinuxCNCs velocity limit to 80-90% of the machine velocity at 10V
The following user(s) said Thank You: NT4Boy
Please Log in or Create an account to join the conversation.
Moderators: piasdom
Time to create page: 0.848 seconds